(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ PУЛE/V ТЕЛЕУПРАВЛЯЕМОЙ МОДЕЛИ СУДНА
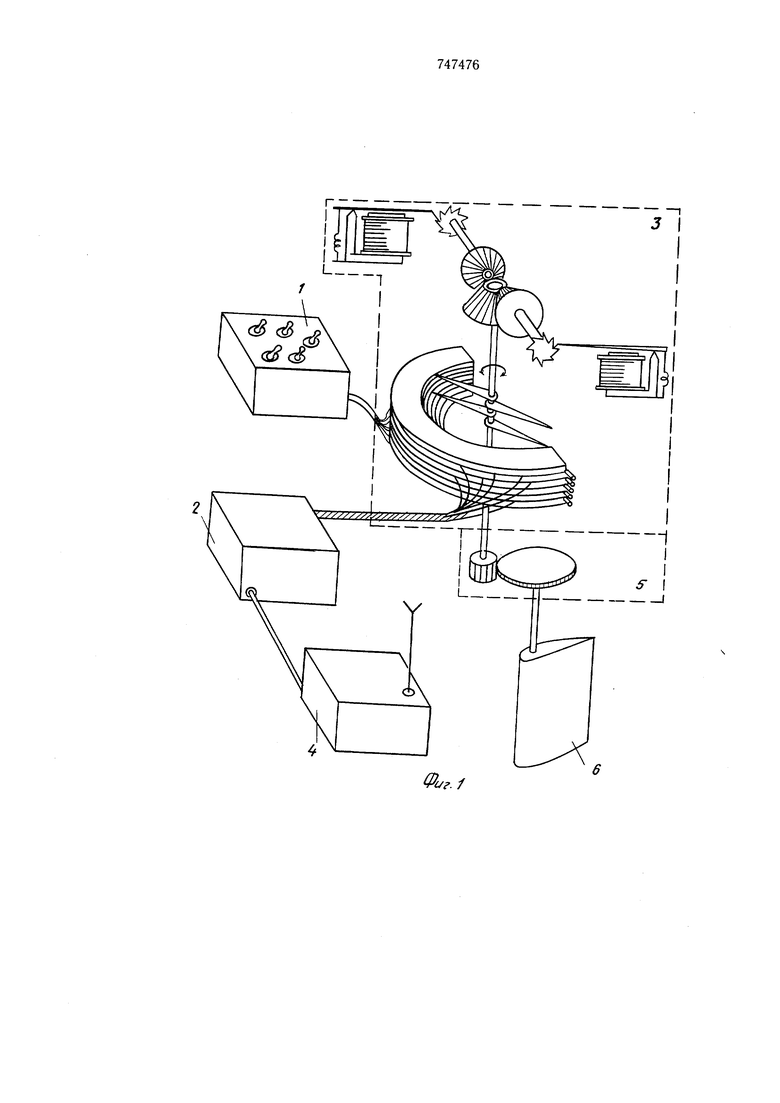
Изобретение относится к устройствам для управления моделей судов. Известно устройство для управления рулем телеуправляемой модели судна, содержащее узел управления правого и левого движения модели, электрически связанный с приводом модели судна, соединенным через редуктор с рулем, и источник питания 1. Недостатком известного, устройства является низкая точность при маневренных движениях судна. Целью изобретения является повышение точности при маневренных движениях судна путем получения фиксированных перекладок руля. Цель достигается тем, что привод выполнен в виде реверсивного шагового искателя, причем узел управления имеет переключатели команд, шины левого и правого управлепия, переключатели пределов перекладки руля, нейтральные реле при этом каждый переключатель команд одним полюсом последовательно связан один с другим и, по крайней мере, один из полюсов связан с первым полюсом HCTOiHHKa питания к с одной из щеток- шагового искателя, контакты которого связаны один с другим и соединены с шинами левого и правого управления, а переключатели пределов команд одними полюсами связаны с шинами левого и правого управления, адругими полюсами соединены один с другим контактами шагового искателя, причем обмотки нейтральных реле через контакты шагового искателя, а обмотки шагового искателя через контакты нейтральных реле связаны со вторым полюсом источника питания. На фиг. 1 приведена общая схема устройства управления; на фиг. 2 - принципиальная электрическая схема. Устройство (фиг. 1) содержит блок 1 ручной уставки, блок 2 исполнительных механизмов радиоуправления, привод 3 модели судна, приемник 4 радиоуправления, редуктор 5 и руль 6. Узел управления правого и левого движения модели имеет блок 1 ручной уставки и блок 2 исполнительных механизмов радиоуправления. Электромагниты реверсивного шагового искателя РШИП и РШИЛ с нейтральными реле Р1 и, соответственно, Р2 образуют пульспары правой и левой перекладки руля (фиг. 2). Контакты КВ1-КВ6 являются Bf)ixo;iiiUA.if-i органами г;п 1арат ры опцноупpaivictiiif f соз/таут С1;пталы команд. Сдвоенные тумблеры переключения пределов перекладки ГИО-П14 и контактные поля реверсивного искателя 4ШИГ1, 5ШИП, 8111ИП и 91ЛИП образуют схему обработки заданных фиксированных значений углов. /Диоды Д1--Д4 служат для искрогашения. Устройство работает следующим образом. Пусть в момент включения питания реверсивный шаговый искатель и руль оказались переложенными на правый борт, например, на 12 шагов искателя (что при использованном в устройстве редукторе дает, например, угол 28°). При этом все контакты KB находятся в исходном (нулевом) состоянии. Тогда от плюса источника питания через левые контакты КВ1, КВ2, КВЗ и контактное тюле 2ШИП HHTafiHc полается на пульспару левого врашення Р2 -РШИП, и она начнет работать, перемешая щетки искателя и руль п cTopoiiv днал етральной плоскости модели, 1. е. влево в нашем случае, в конце концов (цг.гкз аоля 2ШИП сойдет с перемкнутых контактов, подключенных к пульспаре, и, поаав на контакт 0°, разорвет цепь питания нульспары. Таким образом осунлествляется автоматическое возврагцение искателя в iiy.ienoe положение. Пусть теперь придет команда полной ье ;еклялки руля вправо, значение которой с 1,oivioiitbio ту.мблера П10 блока 1 ручной устяок ; бьгло знря..ес установлено на 20 ijfiJ-oB. Тод действием сигиа.яа радиоуправлмчгя Ki:i включится, В результате чего ;i6j)y:iy(TL- цепь питания пульспарЕ) правого . полюс источника, КВ1, поле ЗШИП и пульспара Р1-РШИП. Пульспара станет В)а1ц,ать гцетки и руль вправо до тех пс;{), iioKa ;цетка поля 5ШИП не дойдет до 20 ламели 46,2 руля, после чего цепь питания обирвется и РШИП остановится. При г.озврашеник КБ) в исходное положение РШИП сбрасывается в нуль, так как питание источника подается иа пульспару Р2РШИЛ по цепи: КВ1, КВ2, КВЗ, 2ШИП. Апа.Югично р;.1ссмотренному действует команда па КВ2, с той разницей, что питание пульспары проходит по коптактному полю 4ШИП, и, в зависимости от положения тумблеров nil, П12, схе.ма остановится па 5, 8 или 12-ой ламелях, т. е. при углах перекладки 11,5°, 18,5°, 27,7°. При замыкании КВЗ вправо с помощью тумблеров П13, П14 можно получить следующие углы перекладки руля: 2,3°; 4,6°; 6,9°. Таким образом, манипулируя уставками тумблеров П10 ...П14, можно затем в процессе радиоуправления получить набор любых трех из девяти перекладок руля в любой последовательности с автоматическим возвращением руля в О при снятии команд радиоуправления. Для осуществления перекладки руля влево микропереключатели КВ4, КВ5, КВ6 замыкаются влево, в результате чего образуется цепь питания пульспары левого вращения. Применение описанного устройства управления рулем .модели судна позволяет использовать заранее запрограммированный ряд точных значений углов перекладок руля, переключая их командами телеуправления без возвращения модели судна к берегу. Формула изобретения Устройство для управления рулем телеуправляемой модели судна, содержащее узел управления правого и левого движения модели, электрически связанный с приводом модели судна, соединенным через редуктор с рулем,-И источник питания, отличающееся тем, что, с целью иовыщения точности при маневренных движениях судна путем получения фиксированных перекладок руля, привод выполнен в виде реверсивного шагового искателя, причем узел управления имеет переключатели команд, щины левого и правого уцравле};ия, переключатели пределов перекладки руля, нейтральные реле, при этом каждый переключатель команд одни.м полюсом последовательно связан один с другими и, по крайней мере, один из полюсов связан с первым полюсом источника питания и с одной из щеток шагового искателя, контакты которого связаны один с другим и соединены с тинами левого и правого управления, а переключатели пределов команд одними полюсами связаны с щинами левого и правого управления, а другими полюсами соединены один с други.м контакта.ми Шагового искателя, приче.м обмотки нейтральных реле через контакты шагового искателя, а обмотки шагового искателя через контакты нейтральных реле связаны с вторым полюсом источника питания. Источники информации, принятые во внимание при экспертизе 1. Веселовский А. И., Катин Л. Н. Радиоуправляемая модель корабля. ДОСААФ, 1963.
РИШЛ
.1 J.
±. L
