.ный между дискриминатором и усилителем, а первый коммутирующий элемент выполнен переключающим, причем второй выход блока управления и защиты подключен ко второму коммутирующему элементу, второй выход первого коммутирукицего элемента через компенсирующий интегратор соединен со входами усилителя и схемы установки нуля, выход которой подключен ко второму входу компенсирующего интегратора.
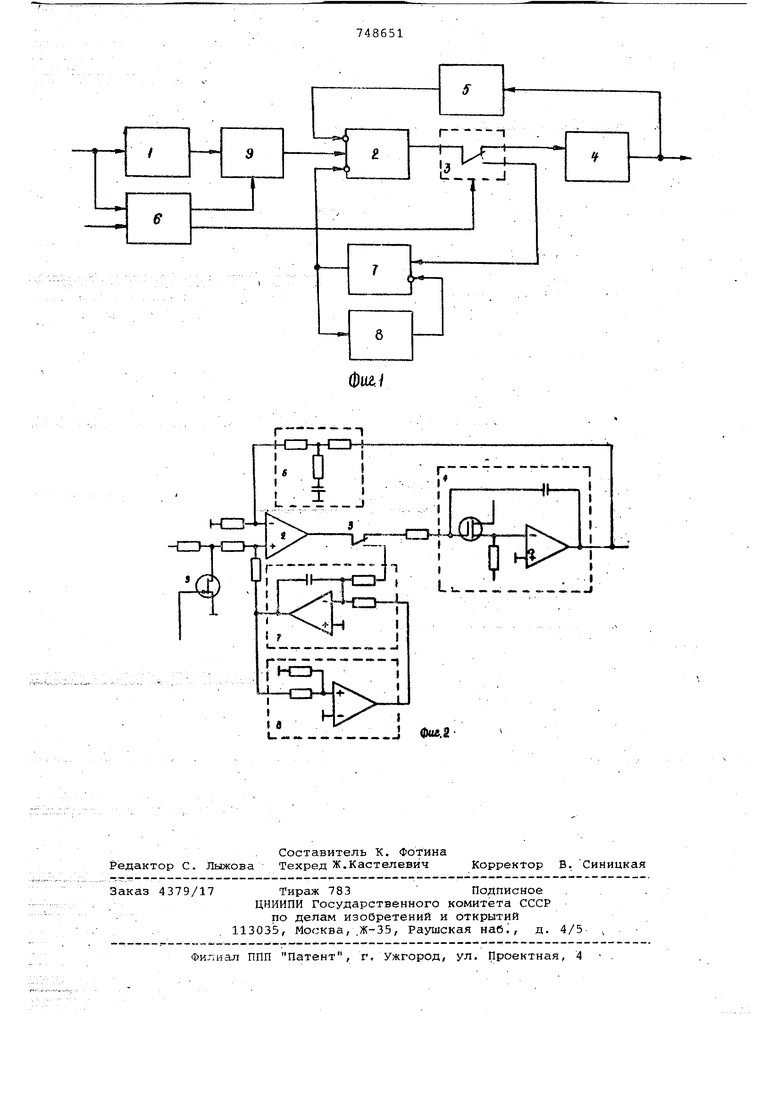
На фиг. 1 показана структура предлагаемого устройства задания внеплановой мощности) на фиг. 2 - принципиальная схема основной части устройства.
Устройство содержит дискриминатор 1, последовательно соединенные усилитель 2, первый коммутирующий элемент 3 и блок 4 памяти, блок 5 динамической коррекции, блок 6 управления и защиты, компенсирующий интегратор 7, схему 8 установки нуля и второй коммутирующий элемент 9.
.Устройство работает следующим образом.
Если устройство длительное время не введено в работу, коммутирующий элемент 3 соединяет выход усилителя 2 с входом блока 4 памяти, а второй коммутирующий элемент 9 отключает вход усилителя 2 от дискриминатора 1 Схема 8 установки нуля поддерживает при этом нулевой сигнал на выходе компенсирующего интегратора 7. В этом состоянии усилитель 2, блоки 4 и 5 образуют замкнутый следящий контур, кото1 ый на выходе блока 4 поддерживает нулевой сигнал, поскольку на входаа усилителя 2 от интегратора 7 приходит нулевой сигнал, а дискриминатор 1 отключен вторым коммутируюйщм элементом 9.. .
Для ввода устройства в работу по-; лается внешний пусковой сигнал на блок 6 управления и защиты, который переключает коммутирующий элемент 3 и после этого вторым коммутирующим элементом 9 соединяет выход дискриминатора 1 с входом усилителя 2. В это время блок 4 памяти хранит на своем выходе нулевой сигнал. Внешний управляющий сигнал через дискриминатор 1 и элемент 9 попадает на вход усилителя 2, усиливается и поступает на вход интегратора 7. Этот сигнал значительно сильнее сигнала от схеГ4Ы В установки нуля, поэтому интеграАэр 7 изменяет свое выходное напряжение до тех пор, пока оно не скомпенсирует на входе усилителя 2 напряжение, поступающее от дискриминатора 1. Таким образом, в этих условиях интегратор 7 в контуре с усилителем 2 работают в режиме непрерывной следящей компенсации внешнего управляющего сигнала, поступающего на Усилитель 2 через дискриминатор и Второй коммутирующий элемент 9. Через определенный интервал времени, достаточный для достижения компенсации входного сигнала, блок 6 управления и защиты переключает в исходное положение ког вдутирующий элемент 3, который вновь соединяет выход усилителя 2 с входом блока 4 памяти. С этого момента устройство вступает в активный режим слежения без толчка напряжения на своем выходе, поскольку начальное значение внешнего входного сигнсша скомпенсировано интегратором 7. Выходное напряжение устройства, начиная с нулевого значения, теперь отслеживает все изменения внешнего входного сигнала. Напряжение на выходе интегратора 7 при этом медленно убывает, стремясь к нулю, под действием схемы 8 установки нуля. По истечении достаточного времени :быходн6е напряжение интегратора 7 становится равным нулю и удерживается на этом уровне. При появлении помехи во входном сигнале или нарушении телеканала блок 6 управления и защиты переключает коммутирующий элемент 3, переводя устройство в режим памяти. При этомблок 4 памяти хранит на своем выходе напряжение, которое было в момент срабатывания коммутирующего элемента 3, а интегратор 7 переходит в режим компенсаций входного сигнала. Поэтому, когда устройство автоматически или по команде персонала переходит в режим слежения толчка напряжения на его выходе не происходит.
Вывод устройства из работы производится по внешней команде, поступающей на блок б управления, и защиты. Последний сразу же переключает коммутирующий элемент 3, переводя устройство в режим памяти, а затем при помощи второго коммутирующего элемента 9 отключает вход усилителя 2 от йыХода дискриминатора 1. Исчезновение внешнего сигнала компенсирует интегратор 7, и его выходное нап&яжёние уравновешивается на йходё усилителя 2 с напряжением, поступающим с выхода блока 4 памяти (через блок 5 динамической коррекции).
Через, определенный интервал времени, достаточный для достижения компенсации, блок б управления и защиты переключает в исходное положение коммутирующий элемент 3, вновь соединяя выход усилителя2 со входом блока 4 памяти. При этом толчка на выходе устройства не происходит. После этого контур, куда входят усилитель 2 и блок 4 памяти, отслеживает сигнал интегратора 7. А этот сигнал под воздействием схемы 8 установки нуля медленно убывает до нулевого уровня. В этом же темпе приходит к нулю и выходной сигнал устройства.
Пример реализации основной части устройства задания внеплановой мощности представлен на фиг« 2. Операционный усилитель 2 через контакты реле 3 может подключаться либо на вход блока 4 памяти, который представляет собой интегратор с полевым МДП-транзистором на входе, либо на вход компенсирующего интегратора 7. В качестве второго коммутируавдего элемента 9 здесь испо Пьзован поле- вой транзистор, который по логическому сигналу, подаваемому на его затвор, может шунтировать цепь, соединяющую вход усилителя 2 с дискриминатором (не показан). Блок 5 динамической коррекции выполнен в виде пассивной RC-цепи. Схема 8 установки нуля содержит усилитель с большим коэффициентом усиления. Это обеспечивает линейный во времени процесс установки нуля (сгона) сигнала компенсирующего интегратора, когда устройство работает в режиме слежения или после вывода из работы. Чтобы схема установки нуля не влияла на процесс компенсации, входной резистор компенсирующего интегратора 7, подключаемый к выходу схемы установт ки нуля, имеет сопротивление значительно большее (примерно в 1000 раз) чем резистор, подключаемый к замыкающему контакту коммутатора 3. .
В выполненнык образцах устройства процесс компенсации входного сигнала длится не более 0,2 с, а темп уста новки нул.я может настраиваться в таких пределах: 100% за 40-120 с.
Положительный эффект изобретения состоит в повышении мобильности устройства. Оно может быть введено в работу в течение десятых долей секунды, тогда как существуйщие устройства перед вводом их в работу требуют выполнения ручной операции подгонка выходного сигнала к уровню входного. Эта операция занимает десятки минут и выполняется при включении устройства, при отключении и при переводе в режим слежения из режима памяти, если последний длится более 8 с. Положительный эффект изобретения состоит также в том, что упрощается ксплуатация предлагаемого устройства, поскольку все операции компенсации и установки нуля автоматизированы.- При этом исключается возможность непра.вильных действий персонала.
Формула изобретения
1.Устройство задания внеплановой мощности для централизованного упoравления нагрузками в энергосистеме, содержащее дискриминатор, последовательно соединенные усилитель, коммутирукндий элемент и блок памяти, а также блок динамической коррекции и блок управления и защиты, выход которого подключен к управляющему входу коммутируквдего элемента, отличающееся тем, что, с целью повышения мобильности устройства и
0 упрощения его эксплуатации, в него введены компенсирующий интегратор, схема установки нуля и второй коммутирующий элемент, включенный между дискриминатором и усилителем, а первый
S коммутируняций элемент выполнен переключающим, причем второй выход блока управления и защиты подключен ко второму коммутирукяцему элементу, второй выход первого коммутирующего элемента через компёсирующий интегратор
0 соединен со входами усилителя и схемы установки нуля, выход которой подключен ко второму входу компенсирующего интегратора.
5
2.Устройство поп. 1, отличающееся тем, что, с целью достижения лииейного во времени процесса установки нуля на выходе компенсирующего иите.гратора, схема установки нуля выполнена в виде усилите0ля с большим коэффициентом усиления.
Источники информации, принятые внимание при экспертизе
1.Кучйин М.Д. Автоматическое управление и контроль режима работы
5 гидроэлектростанций. М., энергия, 1967, гл, 7 и 8.
2.Авторское свидетельство СССР № 506099, кл. Н 02 J 3/06, 1974.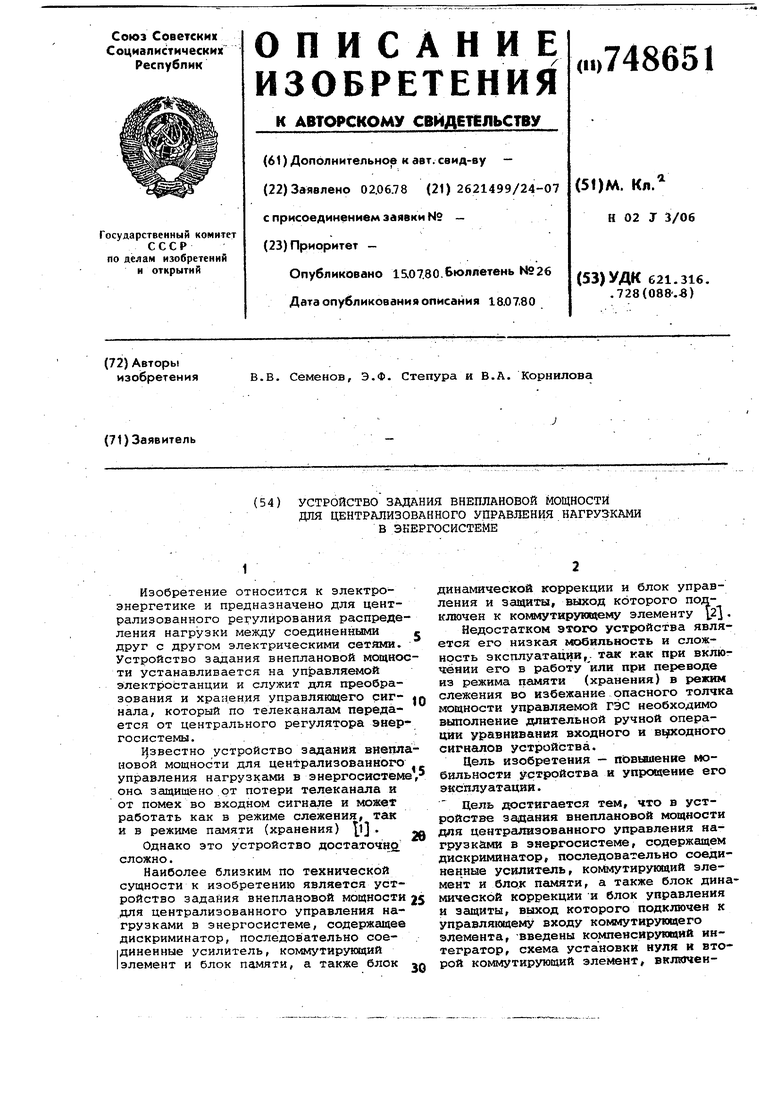
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство задания внеплановой мощности для централизованного управления нагрузками в энергосистеме | 1974 |
|
SU506099A1 |
| Интегратор | 1978 |
|
SU748438A1 |
| ПРОЦЕССОР СПЕКТРОМЕТРИЧЕСКИХ ИМПУЛЬСОВ | 1995 |
|
RU2092872C1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| Устройство для группового автоматического управления частотой и активной мощностью агрегатов гэс | 1978 |
|
SU750649A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Устройство для измерения частоты | 1979 |
|
SU813291A1 |
| Устройство для сопряжения каналов телемеханики с устройством управления мощностью электростанции | 1986 |
|
SU1478276A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |