(5) УСТРОЙСТВО для УПРАВЛЕНИЯ ОПТИЧЕСКИМ ТЕЛЕСКОПОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Система управления телескопом | 1984 |
|
SU1238026A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Преобразователь угла поворота в код | 1976 |
|
SU642753A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |

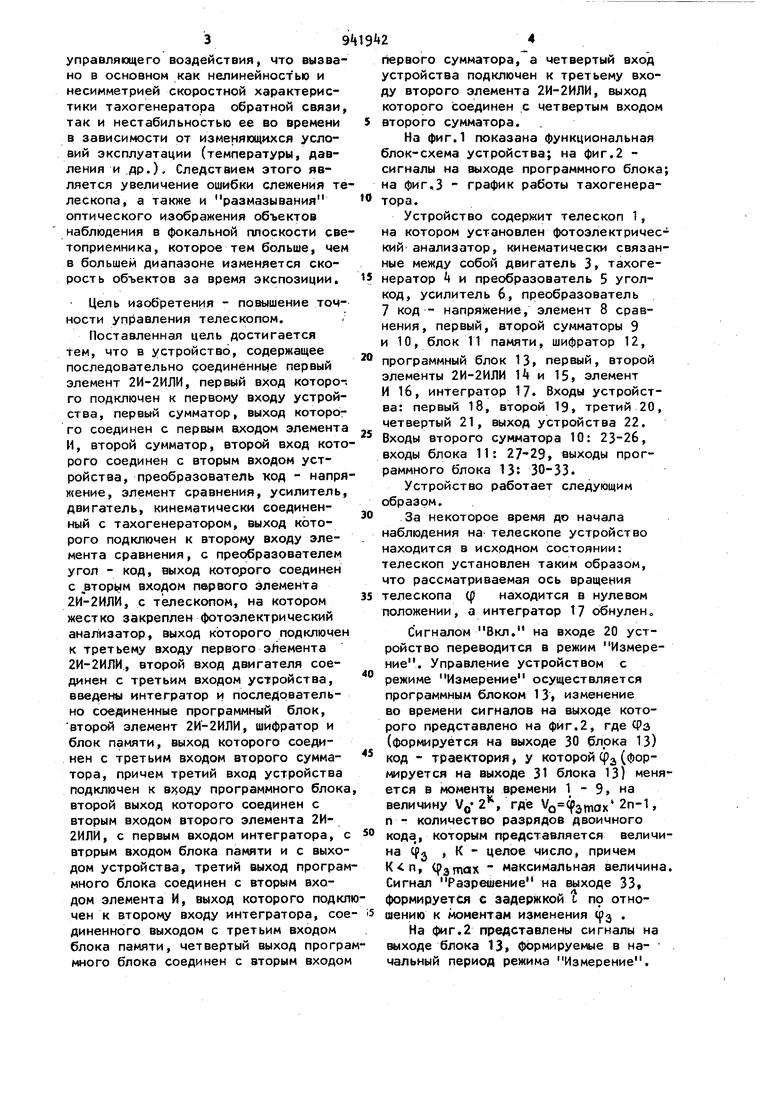
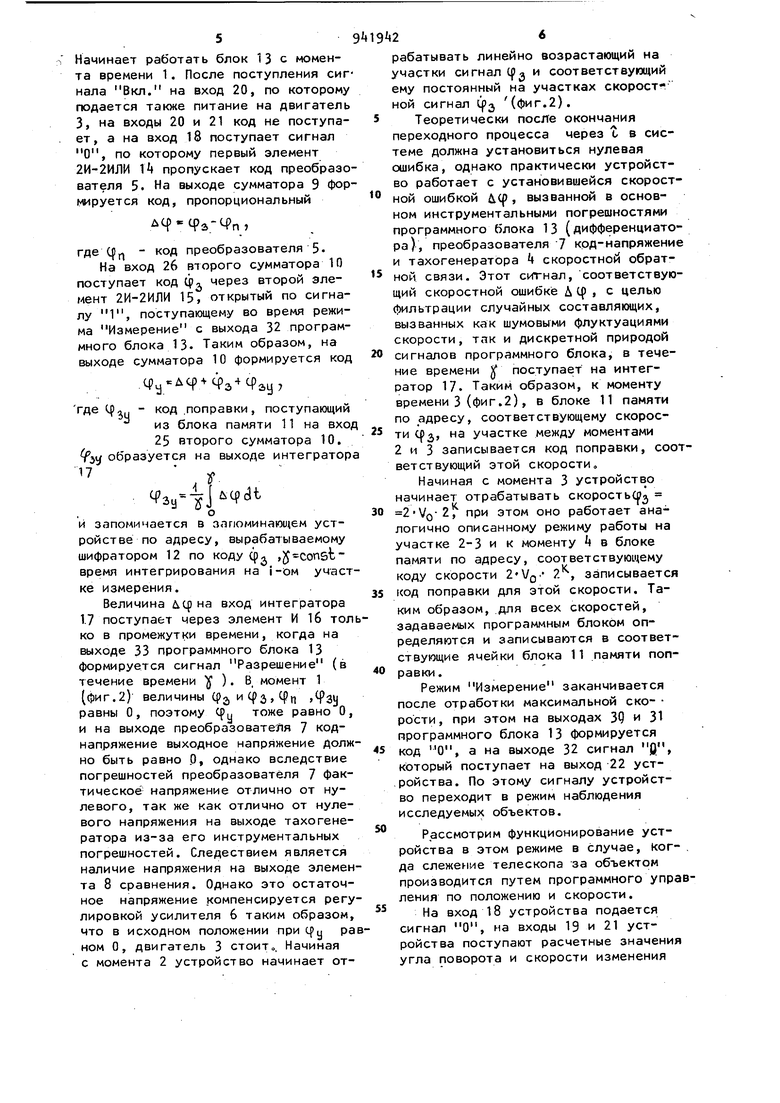
Изобретение относится к астропри фостроению, в частности к системам управления телескопами. Известны системы управления теле копами с использованием компенсирую щей связи по произволHov r от управляющего воздействия, содержащие зам нутый канал регулирования по положе нию из последовательно соединенных сумматора, цифроаналогового преобразователя, привода с нагрузкой и преобразователя вал-код и разомкнутый канал регулирования скорости, содержащий дифференциатор и второй цифроаналоговый преобразователь, подключенный к входу привода ГЛ и 2. /Наиболее близким к изобретению по технической cyщнoctи является система управлением азимутальным телескопом, имеющая канал управления по положения - канал про раммного управления по управляюще АУ воздействию - либо канал фотоэлектрического гидирования (в зависимости от режима работы) и канал программного управления по скорости измерения входного воздействия. При работе на телескопе на азимутальной монтировке скорости телескопа относительно осей А и Z переменны и изменяются как по знаку, так и по абсолютной величине теоретически от О до оо При работе на телескопе на экваториальной монтировке, оборудованном такой же системой комбинированного управления, необходимость отработки скоростей в широком диапазоне вызвана большим диапазоном скоростей искусственных тел относительно осей t и о телескопа |зЗ« Недостатком известных систем управления оптическими телескопами является относительно низкая практическая точность реализации программного управления по скорости в широком диапазоне изменения скоростей управляющего воздействия, что вызвано в основном как нелинейностью и несимметрией скоростной характеристики тахогенератора обратной связи так и нестабильностью ее во времени в зависимости от изменяющихся условий эксплуатации (температуры, давления и др.)- Следствием этого является увеличение ошибки слежения те лескопа, а также и размазывания оптического изображения объектов наблюдения в фокальной плоскости све топриемника, которое тем больше, чем в большем диапазоне изменяется скорость объектов за время экспозиции. Цель изобретения - повышение точности управления телескопом. Поставленная цель достигается тем, что в устройство, содержащее последовательно соединённые первый элемент 2И-2ИЛИ, первый вход которого подключен к первому входу устройства, первый сумматор, выход которого соединен с первым входом элемента И, второй сумматор, второй вход кото рого соединен с вторым входом устройства, преобразователь код - напря жение, элемент сравнения, усилитель двигатель, кинематически соединенный с тахогенератором, выход которого подключен к второму входу элемента сравнения, с преобразователем угол - код, выход которого соединен с вторым входом первого элемента 2И-2ИЛИ, с телескопом, на котором жестко закреплен фотоэлектрический анализатор, выход которого подключен к третьему входу первого элемента 2И-2ИЛИ, второй вход двигателя соединен с третьим входом устройства, введены интегратор и последовательно соединенные программный блок, второй элемент 2И-2ИЛИ, шифратор и блок памяти, выход которого соедианен с третьим входом второго сумма тора, причем третий вход устройства подключен к программного блока второй выход которого соединен с вторым входом второго элемента 2И2ИЛИ, с первым входом интегратора, вторым входом блока памяти и с выходом устройства, третий выход програм много блока соединен с вторым входом элемента И, выход которого подкл чен к второму входу интегратора, сое диненного выходом с третьим входом блока памяти, четвертый выход прогр много блока соединен с вторым входо первого сумматора, а четвертый вход устройства подключен к третьему входу второго элемента 2И-2ИЛИ, выход которого соединен с четвертым входом второго сумматора. На фиг.1 показана функциональная блок-схема устройства; на фиг.2 сигналы на выходе программного блока; на фиг,3 - график работы тахогенератора. Устройство содержит телескоп 1, на котором установлен фотоэлектрический анализатор, кинематически связанные между собой двигатель 3, тахогенератор i и преобразователь 5 уголкод, усилитель 6, преобразователь 7 код - напряжение, элемент 8 сравнения, первый, второй сумматоры 9 и 10, блок 11 памяти, шифратор 12, программный блок 13, первый, второй элементы 2И-2ИЛИ И и 15, элемент И 16, интегратор 17 Входы устройства: первый 18, второй 19, третий 20, четвертый 21, выход устройства 22. Входы второго сумматора 10: 23-26, входы блока 11: 27-29, выходы программного блока 13i 30-33. Устройство работает следующим образом. За некоторое время до начала наблюдения на телескопе устройство находится в исходном состоянии: телескоп установлен таким образом, что рассматриваемая ось вращения телескопа ф находится в нулевом положении, а интегратор 17 обнулен. Сигналом Вкл. на входе 20 устройство переводится в режим Измерение. Управление устройством с режиме Измерение осуществляется программным блоком 13 изменение во времени сигналов на выходе которого представлено на фиг.2, где Фз (формируется на выходе 30 блока 13) код - траектория у которой ф (формируется на выходе 31 блока 13) меняется в моменты времени 1 - 9, на величину УО 2, где Уо зтах 2п-1, h - количество разрядов двоичного кода, которым представляется величина ф целое число, причем , (Рзтох максимальная величина. Сигнал Разрешение на выходе 33, формируется с задержкой t по отношению к моментам изменения ф . На фиг.2 представлены сигналы на выходе блока 13, формируемые в начальный период режима Измерение.
Начинает работать блок 13 с момента времени 1. После поступления сигнала Вкл. на вход 20, по которому подается также питание на двигатель 3, на входы 20 и 21 код не поступает, а на вход 18 поступает сигнал О, по которому первый элемент 2И-2ИЛИ Т пропускает код преобразователя 5. На выходе сумматора 9 формируется код, пропорциональный
ДЧ -фа-Ч п5
где Срг код преобразователя 5На вход 26 второго сумматора 10 поступает код ф, через второй элемент 2И-2ИЛИ 15, открытый по сигналу 1, поступающему во время режима Измерение с выхода 32 программного блока 13. Таким образом, на выходе сумматора 10 формируется код
.Му-ЛЯ Фэ Чзу
где °Д .поправки, поступающий из блока памяти 11 на вход 25 второго сумматора 10. yj образуется на выходе интегратора
17
Г
и запоминается в загюминаюи(ем устройстве по адресу, вырабатываемому шифратором 12 по коду ф, ,5 const время интегрирования на i-ом участке измерения.
Величина л Ц) на вход интегратора 1.7 поступает через элемент И 1б толко в промежутки времени, когда на выходе 33 программного блока 13 формируется сигнал Разрешение (в течение времени У ). В, момент 1 (фиг.2) величины .Рп Фзу равны О, поэтому Сру тоже равно О, и на выходе преобразователя 7 коднапряжение выходное напряжение Должно быть равно О, однако вследствие погрешностей преобразователя 7 фактическое- напряжение отлично от нулевого, так же как отлично от нулевого напряжения на выходе тахогенератора из-за его инструментальных погрешностей. Следествием является наличие напряжения на выходе элемента 8 сравнения. Однако это остаточное напряжение компенсируется регулировкой усилителя 6 таким образом, что в исходном положении при равном О, двигатель 3 стоит,. Начиная с момента 2 устройство начинает отрабатывать линейно возрастающий на участки сигнал Cf д соответствующий ему постоянный на участках скоростной сигнал (р2 (фиг.2). 5 Теоретически после окончания
переходного процесса через t в системе должна установиться нулевая ошибка, однако практически устройство работает с установившейся скоростной ошибкой uiCj), вызванной а основном инструментальными погрешностями программного блока 13 (дифференциатора), преобразователя 7 код-напряжение и тахогенератора k скоростной обратной связи. Этот сигнал, соответствующий скоростной ошибке Д Ц) , с целью фильтрации случайных составляющих, вызванных как шумовыми флуктуациями скорости, тпк и дискретной природой
0 сигналов программного блока, в течение времени у поступает на интегратор 17. Таким образом, к моменту времени 3 (фиг.2), в блоке 11 памяти по адресу, соответствующему скорости Cf , на участке между моментами
2 и 3 записывается код поправки, соответствующий этой скорости.
Начиная с момента 3 устройство начинает отрабатывать скоростьСр
0 2VQ-2 при этом оно работает аналогично описанному режиму работы на участке 2-3 и к моменту в блоке памяти по адресу, соответствующему коду скорости 2Уд. Р., записывается
5 код поправки для этой скорости. Таким образом, для всех скоростей, задаваемых программным блоком определяются и записываются в соответ ствующие ячейки блока 11 .памяти поправки.
Режим Измерение заканчивается после отработки максимальной ско- рости, при этом на выходах 3Q и 31 программного блока 13 формируется
код О, а на выходе 32 сигнал Q, который поступает на выход 22 устройства. По этому сигналу устройство переходит в режим наблюдения исследуемых объектов.
Рассмотрим функционирование устройства в этом режиме в случае, Ког- , да слежение телескопа за объектом производится путем программного управления по положению и скорости. На вход 18 устройства подается сигнал О, на входы 13 и 21 устройства поступают расчетные значения угла поворота и скорости изменения 7 которые должны отраба его срр ,фр, тываться приводом телескопа. На выход первого сумматора 9 поступает код , прошедший через первый элемент 2И-2ИЛИ Т. Через вт рой элемент 2И-2ИЛИ 15 проходит код (fn поступая на вход 26 второго сумматора 10 и шифратор 12, который вырабатывает сигнал опроса адреса блока 11 памяти, соответствующего величине фр. По сигналу О на входе 29 блока 11 памяти считывает поп равку, хранящуюся по этому адресу (Чзи) которая поступает на вход 25 второго сумматора 10. На выходе второго сумматора 10 формируется код фа; рр-Фп Мзу Ч рТаким образом, в этом режиме про исходит точное программное управление приводом по скорости, благодаря чему слежения уменьшается за счет учета(2цИ мало зависит от скорости исследуемого объекта,Размазывание изображения объекта, являющееся следствием изменения cp в течение времени экспози ции, также минимально. Наблюдение исследуемых объектов путем автомати ческого фотоэлектрического гидирова ния телескопом по положению и программного управления по скорости задается при поступлении на вход 18 устройства сигнала 1, при этом на входе 19 Ц) р равно 0. При сложении телескопа за исследуемым объектом ошибка слежения пропорциональна смещению изображения гидируемой звезды З относитель но центра фотоэлек1рического анализатора 2, установленного на телескопе. Сигнал Ь(р2 пропорциональный этому смещению, поступает с выхода фотоэлектрического анализатора 2 че рез первый элемент 2И-2ИЛИ 1 и пер вый сумматор 9 на вход 2k второго .сумматора 10, который формирует код, управляющий приводом: фу s (рр-f В этом случае ошибка сле)хения также уменьшена на счет учета . Точность программного управления по скорости объекта.:набл1одения (производной от управляющего воздействия;) практически определяется пог28решностью дифференциатора , погрешностью цифро-аналогового преобразователя код-напряжение Л п , погрешностью, вызванной иа 4еь1ениями мо- . мента на валу исполнительного двигйтелядш, погрешностью тахометрической обратной связи&-ff . Относительная приведенная погрешность дифференциатора tg при программном управлении определяется разрядной сеткой управляющей машины и может быть сведена до практически незначительных величин порядка 0,0001-0,001 относительная приведенная погрешность выпускаемых промышленностью цифро-аналоговых 10-11 разрядных преобразователей д, определяется величиной порядка 0,20,3, относительная приведенная моментная ошибка приводов Д/д применяемых на телескопах, имеет величину (во всём температурном диапазоне эксплуатации) порядка 0,05-0,1, относительная погрешность тахометрической обратной связи Д, определяемая в основном нелинейностью и несимметрией характеристики тахогенератора и его температурной погрешностью, составляет величину порядка На фиГоЗ показана характеристика () Практически настройка производится в точке Л пересечения реальной характеристики тахогенератора с аппроксимирующей прямой, проведенной так, что максимальное отклонение реальной характеристики от прямой слева и справа от точки пересечения (точки настройки) равны по абсолютной величине Отклонение реальной характеристики от прямой есть некомпенсируемая дифференциатором скоростная погрешность тахогенератора. Кроме того, настройка приводов системы осуществляется практически при определенной температуре, а оптические телескопы устанавливаются в самых различных районах страны на разных высотах (от равнинных высот до 000-5000 м над уровнем моря), где сезонные и месячные колебания температуры могут достигать сув)ественных величин, что требует регулярной перенастройки компенсирующего температурные погрешности тахометрической обратной связи канала. Таким образом, в худшем случае максимальная погрешность компен сации скорости при программном упра . лении буде определяться суммой сос:тавляющих, и предыдущий анализ показывает, что основную составляющую погрешности определяет Д-гг« Ошибка по положению 6 комбинированной системы при относительно малых ускорениях (что имеет место в астрономических системах) практи чески определяется выражением , т.е. определяется добротностью по скорости позиционного контура и результирующей погрешностью компенсации скорости. При использовании предлагаемого устройства погрешность компенсации скорости практически может быть сведена до т.е. практически до погрешности цифроаналогового преобразователя. Это зн чит, что ошибка по положению 9 при этом уменьшается соответственно в9/9 Аск. 6-18 раз. Преимуществом предлагаемого устройства по сравнению с известными является уменьшение ошибки слежения телескопа за объектом и Размазы вания изображения в фокальной плос кости светоприемника за счет уменьшения до минимальной величины ошибок, программного управления телеско па по скорости в широком диапазоне изменения управляющего воздействия. Формула изобретения Устройство для управления оптическим телескопом, содержащее последовательно соединенные первый элемент 2И-2ИЛИ, первый вход которого подключен к первому входу устройства, первый сумматор, выход которого соединен с первым входом элемента И, второй сумматор, второй вход которого соединен с вторым входом устройства, преобразователь код напряжение, элемент сравнения, усилитель, двигатель, кинематичесю соединенный с тахогенер атором, выход которого подключен к второму входу элемента сравнения, с- преобразователем угол - код, выход которого соединен с вторым входом первого элемента 2И-2ИЛИ, с телескопом, на котором жестко закреплен фотоэлектрический анализатор, выход которого подключен к третьему входу первого элемента 2И-2ИЛИ, второй вход двигателя соединен с третьим вхбдом устройства, отличающееся тем, что, с целью повышения точности управления телескопом, устройство содержит интегратор и последовательно соединенные программный блок, второй элемент 2И-2ИЛИ, шифратор и блок па- мяти, выход которого соединен с третьим входом второго сумматора, причем третий вход устройства подключен к входу программного блока, второй выход которого соединен с вторым входом второго элемента 2И2ИЛИ, с первым входом интегратора, с вторым входом блока памяти и с выходом устройства, третий выход программного блока соединен с вторым входом элемента И, выход которого подключен к второму входу интегратора, соединенного выходом с третьим входом блока памяти, четвертый выход программного блока соединен с вторым входом первого сумматора, а четвертый вход устройства подключен к третьему входу второго элемента 2И-2ИЛИ, выход которого соединен с четвертым входом второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № Mk683, кл. G 21 С W50, . 2.Авторское свидетельство СССР № BЭ07, кл. G 05 В 5/01, 1973. 3.Найшуль А.С., Неплохов Е.М. Система программного управления оптическим телескопом.- Оптикомеханическая промышленность, И 9 (прототип).
Фиг. г
Фиг.З
(У} ()
