Изобретение относится к радиолокации может быть использовано в имульсно-доплеровских станциях непрерывного сопровождения целей, работающих в режиме высокой частоты повторения импульсов, для защиты от уводящей по дальности помехи, доплеровская частота которой равна доплеровской частоте отраженного от цели сигнала.
Помехи, уводящие по дальности, представляют собой последовательность ответных импульсов, задержанных относительно сигнала на величину, монотонно изменяющуюся от нуля до некоторого заданного значения τ3 (Защита от радиопомех. Под ред. М.В. Максимова, -М.: Сов. радио, 1976, с. 77). В начальный момент воздействия ответный импульс помехи совмещается с импульсом, отраженным от цели. На вход дальномера поступают одновременно два совмещенных импульса - сигнал и помеха. При увеличении времени задержки стробы дальномера начинают отслеживать сигнал помехи.
Дальномер обычно состоит из временного дискриминатора, корректирующего звена и, как правило, двух интеграторов (Радиолокационные устройства под ред. В.В. Григорина-Рябова. -М.: Сов. радио, 1970, рис. 12-1, с. 319).
Корректирующее звено и часть дальномера, содержащая два интегратора, в формуле предлагаемого изобретения названы управляющей частью дальномера. Управляющая часть дальномера имеет два выхода. Первый выход - по дальности, второй - по производной изменения дальности. При отслеживании сигнала помехи дальномер выдает ложную информацию в систему управления истребителем, системы целеуказания и радиокоррекции ракетного управляемого вооружения (РУВ).
При значении τ3, превышающем апертуру временного дискриминатора, дальномер отслеживает только сигнал помехи. При выключении передатчика помех сигнал в приемнике пропадает, система углового сопровождения цель не сопровождает, информация об угловых координатах цели теряется. После перезахвата дальномером сигнала цели начинается новый цикл увода.
Уводящая по дальности помеха вызывает ошибки в измерении D и  и приводит к перерывам информации в угломерном канале (Защита от радиопомех. Под ред. М.В. Максимова, с. 78).
и приводит к перерывам информации в угломерном канале (Защита от радиопомех. Под ред. М.В. Максимова, с. 78).
Для защиты импульсных РЛС от уводящих по дальности помех сопровождение цели производится не по центру тяжести импульса, а по его фронту (Защита от радиопомех. Под ред. Максимова, с. 129, 140, 339). При слежении за фронтом импульса дальномер отслеживает объект, имеющий наименьшую дальность, и уводящая на большие дальности помеха не будет эффективна.
Представленный метод защиты от уводящей по дальности помехи эффективен лишь при использовании режима импульсного излучения.
При использовании импульсно-доплеровского излучения с высокой частотой повторения импульсов (ВЧП) этот метод не эффективен.
При использовании импульсно-доплеровского излучения с ВЧП дальность до цели значительно больше дальности, соответствующей периоду повторения импульсов. Непосредственно измеряется неоднозначная дальность (фиг.1).
На фиг. 1 представлены дальности до цели Dц, неоднозначная дальность до цели Dнеод, Dпер = CT/2 - дальность, соответствующая периоду повторения импульсов T; D1, D2, D3 - неоднозначное значение дальностей до центров, например, первого, второго и третьего стробов, осуществляющих прием отраженного от цели сигнала.
Dреж - зона режекции, Dимп - дальность, соответствующая длительности импульса. Период повторения импульсов выбирается так, чтобы отраженный сигнал от цели попал в зону приема. Построение устройства выбора периода повторения представлено в (Горгонов Г.И. Автоматическое сопровождение целей в бортовой радиолокационной станции с ЭВМ. - М.: Академия им. Жуковского, 1988, раздел 2.25, с. 54 - 68).
Неоднозначная дальность определяется выражением (1)
(1)
Пусть Dреж = 2Dимп, Dстр = Dимп. {y}ц.ч. - целая часть y. {y}др.ч. - дробная часть y.
Выбираем такой период, чтобы при дальности на выходе дальномера Dц неоднозначная дальность была бы равна 0,7 Dпер или, другими словами, чтобы принятый импульс находился между вторым и третьим стробами.
Введем величину 
Обычно устанавливают пределы возможных значений γ
γmin≤γ≤γmax. (2)
Алгоритм выбора периода повторения импульсов представлен на фиг. 2, где
Tmin - минимальное возможное значение периода повторения импульсов,
Tmax - максимальное возможное значение периода,
Tвыб - выбранное значение периода,
ΔT - шаг изменения величины периода повторения,
τц - время, соответствующее Dц.
Выбор периода начинается с минимального его значения.
Первое значение Ti, удовлетворяющее условию (2), принимается выбранным.
При Ti > Tmax выбранным принимается максимальное значение периода повторения импульсов.
В качестве прототипа предлагаемого изобретения примем дальномер импульсно-доплеровской БРЛС, работающей с высокой частотой повторения импульсов (Горгонов Г.И. Автоматическое сопровождение целей в бортовой радиолокационной станции с ЭВМ. - М.: Академия им. Жуковского, 1988, с. 41). Управляющая часть дальномера может быть реализована в виде α-β фильтра (там же, с. 21, рис. 2.5), либо α-β-γ фильтра (там же, с. 49, рис. 2.12).
Временной дискриминатор описывается уравнением (там же, с. 45, формула (2.75))
где Ai, Ai+1 - амплитуды принятого сигнала в соседних стробах, в которых было превышение сигналом порога,
c - скорость света,
τимп- длительность импульса.
Блок выбора периода повторения представлен там же в разделе п. 2.2.5, с. 54 - 63.
Возможный алгоритм реализации блока выбора периода повторения представлен на фиг. 2.
Использование сопровождения за фронтом импульса при работе РЛС в режиме ВЧП не эффективно при воздействии помехи, уводящей на большую дальность. При достижении рассогласования между Dц и Dп (дальность, имитируемая помехой) величины, близкой к Dпер, неоднозначная дальность до помехи становится меньше Dнеод до цели. Дальномер переходит на сопровождение помехи. В систему целеуказания и радиокоррекции выдается ложная информация.
Задачей изобретения является создание дальномера, обеспечивающего получение достоверной информации о дальности до цели в условиях воздействия уводящей по дальности помехи при применении импульсно-доплеровского излучения с высокой частотой повторения импульсов.
Поставленная цель - обеспечение защиты от уводящей по дальности помехи достигаются путем обнаружения факта воздействия уводящей по дальности помехи, селекции сигналов цели и помехи и выдачи в систему информации о дальности до сопровождаемой цели.
За критерий наличия уводящей помехи примем отличие вычисляемого дальномером значения скорости сближения  от значения
от значения  скорости сближения, соответствующей доплеровской частоте, измеренной приемником. При этом в частотном канале приемника - только один сигнал, ибо при применении помехи, уводящей только по дальности, доплеровские частоты сигнала, отраженного от корпуса сопровождаемой цели и помехи, совпадают.
скорости сближения, соответствующей доплеровской частоте, измеренной приемником. При этом в частотном канале приемника - только один сигнал, ибо при применении помехи, уводящей только по дальности, доплеровские частоты сигнала, отраженного от корпуса сопровождаемой цели и помехи, совпадают.
Пороговое значение разности скоростей, при котором принимается решение о наличии уводящей по D помехи, выбирается таким, чтобы искажение значения дальности не привели бы к выдаче ложных сигналов и команд управления потребителем и РУВ.
В момент принятия решения о уводе дальномера помехой различие дальностей цели и помехи небольшое и разделить их невозможно.
Для того чтобы не увеличить ошибки в значениях дальности, выдаваемых в систему, необходимо запомнить значение дальности Dпам в этот момент и пролонгировать согласно формуле
где tо - момент, определяющий воздействие помехи; значение производной дальности, соответствующее доплеровской частоте на выходе приемника.
значение производной дальности, соответствующее доплеровской частоте на выходе приемника.
При пролонгации запомненного значения дальности до цели дальномер осуществляет слежение за помехой, при этом в стробах дальномера может находиться и сигнал цели. Наличие двух сигналов в стробах дальномера приводит к возрастанию флюктуационных ошибок. Поэтому целесообразно осуществлять попеременное слежение за целью и помехой. При этом один из сигналов должен находиться в зоне приема, а второй в зоне режекции. Такое расположение двух сигналов достигается выбором периода повторения импульсов. Поскольку выбор периода повторения ограничен заданным диапазоном значений, то поставленное условие может быть выполнено с определенного значения разности дальностей до цели и помехи. Это значение разности определяется минимальным из разрешенных к применению значением периода повторения.
При осуществлении слежения за помехой (или целью) второй сигнал необходимо пролонгировать с такой точностью, чтобы ошибки экстраполяции не приводили к появлению второго сигнала в стробах дальномера.
Осуществить экстраполяцию помехи в течение длительного времени невозможно, так как законы увода по дальности неизвестны и непредсказуемы. Использование информации о доплеровском сдвиге частоты позволяет осуществить с приемлемой точностью пролонгацию дальности в течение длительного времени. Таким образом, для защиты от помехи уводящей по дальности будем осуществлять непрерывное слежение за помехой, прерываемое дискретным сопровождением сигнала цели.
Дискретная корректировка пролонгированной дальности цели необходима для:
- компенсации начальных ошибок пролонгации;
- компенсации ошибок пролонгации;
- подтверждения факта наличия сопровождаемой цели на прогнозируемой дальности.
Первое уточнение производится при достижении разности между сигналом помехи с выхода дальномера и пролонгированным значением дальности до цели заданной величины.
После уточнения дальности до цели дальномер переходит на сопровождение помехи.
Последующие уточнения дальности до цели производятся через определенные интервалы времени.
Попеременное измерение неоднозначной дальности до помехи или цели осуществляется за счет введения блока селективного выбора периода повторения (по цели или помехе). На вход этого блока поступают сигналы дальности до помехи и пролонгированное значение дальности до цели. Один из сигналов поступает на режективный вход, другой - на приемный.
В блоке выбирается такой период повторения импульсов, чтобы сигнал, поступающий на режективный вход, оказался в зоне режекции, а сигнал, поступающий на приемный вход, оказался в зоне приема.

Значения γi должны быть такими, чтобы импульс сигнала цели или сигнал помехи оказался в зоне приема
γmin≤ γi≤γmax (5)
Значения gi должны быть такими, чтобы сигнал, поступающий на режективный вход, оказался в зоне запирания приемника
gmin ≤ gi ≤ gmax. (6)
Совместное выполнение условий (5) и (6) определяет период повторения импульсов. Алгоритм выбора периода повторения импульсов представлен на фиг. 3, где
τреж- время, соответствующее дальности на режективном входе,
τпр- время, соответствующее дальности на приемном входе.
На фиг. 3 приняты следующие обозначения: Tmin - минимальное возможное значение периода повторения импульсов, Tmax - максимальное возможное значение периода, Tвыб - выбранное значение периода повторения импульсов, ΔT - шаг изменения T.
На вход алгоритма поступают значения дальности до помехи и до цели, значения выбранного периода повторения поступают на входы передатчика и приемника.
При подаче на приемный вход сигнала дальности цели, а на режективный вход сигнала дальности помехи вырабатывается период повторения, обеспечивающий измерение временным дискриминатором разности (ΔD) между пролонгированным значением дальности до цели и принятым сигналом цели.
Откорректированное значение дальности Dкор вычисляется по формуле
Dкор=(1-α)Dпр+αΔD , (7)
где α- коэффициент сглаживания.
α- может быть постоянной величиной, может изменяться в зависимости от номера корректировки.
Во время корректировки может быть произведено одно или несколько уточнений дальности. При этом величина α может быть переменной.
Откорректированное значение дальности вводится в регистр запоминания. Процесс пролонгации согласно формуле (4) продолжится, только начальное условие Dпам заменяется на Dкор.
Назовем блоки, реализующие математические операции, представленные формулами (4), (5), (6), (7) дискретно-непрерывным дальномером. В этом дальномере уточнение дальности производится дискретно, а интегрирование производной изменения дальности непрерывно. Управление процессом слежения и коммутации сигналов производится с помощью управляющих ключей, двухполюсных переключателей, двухканальных переключателей, элемента ИЛИ (А. Флорес. Организация вычислительных машин. Пер. с анг. -М., 1972, с. 20). Двухполюсный переключатель по управляющей команде переключает входной сигнал с одного выхода на другой.
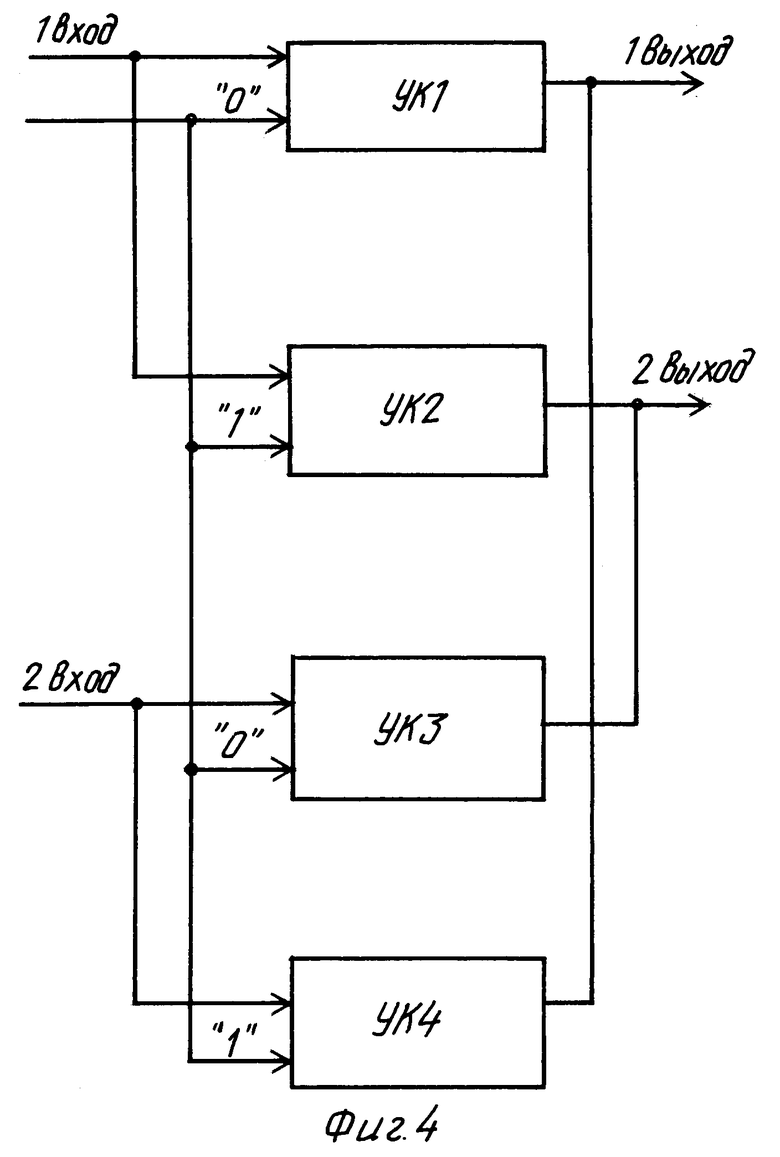
Двуканальный переключатель по управляющей команде соединяет один из двух входов с выходом. Переключателем названо устройство, которое по управляющей команде переключает сигналы с двух входов на два выхода. Блок-схема переключателя, состоящего из четырех управляющих ключей, представлена на фиг. 4.
При управляющей команде "0" первый вход соединен с первым выходом, а второй вход - с вторым выходом, при управляющей команде "1" первый вход - с вторым выходом, а второй вход - с первым выходом. При управляющем сигнале "0" открыты управляющие ключи УК1, УК3, управляющие ключи УК2, УК4 закрыты. Сигналы первого входа проходят на первый выход, а сигналы второго входа проходят на второй выход. При управляющем сигнале "1" открыты УК2, УК4, а УК1, УК3 закрыты. Сигналы первого входа проходят на второй выход.
На фиг. 5 представлена блок-схема предлагаемого устройства - дальномера при воздействии помехи, уводящей по дальности.
Устройство "дальномер при воздействии помехи, уводящей по дальности" содержит приемник 1, передатчик 2, временной дискриминатор 3, двуполюсный переключатель 4, первый усилитель 5, второй управляющий ключ 6, счетчик времени 7, второй двуканальный переключатель 8, первый двуканальный переключатель 9, управляющая часть дальномера 10, третий управляющий ключ 11, интегратор 12, второй усилитель 13, пороговое устройство 14, блок выбора периода повторения 15, блок селективного выбора периода повторения 16, первое устройство сравнения 17, четвертый управляющий ключ 18, ячейка запоминания 19, первый сумматор 20, второй формирователь импульсов 21, переключатель 22, второе устройство сравнения 23, третий двуканальный переключатель 24, первый формирователь импульсов 25, второй сумматор 26, первый управляющий ключ 27, элемент ИЛИ 28.
Выход третьего двуканального переключателя - выход устройства.
Пусть на вход представленного устройства в начальный момент поступает сигнал, отраженный только от цели. В этом случае сигналы с выходов блоков 23, 28, равные нулю, поступают на управляющие входы двухканальных переключателей (бл.8 и бл.9) и двухполюсного переключателя бл.4.
С первого выхода (по дальности) приемника сигнал поступает на вход временного дискриминатора, где вырабатывается сигнал ошибки сопровождения цели, который через двуполюсный переключатель поступает на вход управляющей части дальномера. На первом выходе бл.10 - сигнал дальности до цели, а на втором - сигнал производной изменения дальности 
Сигнал с первого выхода бл. 10 поступает на входы бл. 23, бл. 15 и бл. 8. В блоке 15 вычисляется период, "прозрачный" для значения дальности, поступающего на его вход.
Сигнал со второго (по доплеровской частоте) выхода приемника поступает на первый вход устройства сравнения бл.17, на второй вход которого поступает сигнал оценки скорости сближения с управляющей части дальномера. При слежении за целью сигналы производной изменения дальности и доплеровского сдвига частоты равны, поэтому на выходе блока 17 сигнал равен "0". Этот сигнал поступает на управляющий вход третьего двуканального переключателя бл.24. Сигнал дальности через бл. 24 проходит на вход бл. 23, на другой вход бл. 23 поступает тот же сигнал непосредственно с бл. 10. Поэтому на выходе бл. 23 сигнал равен "0". При сигнале на выходе бл. 23, равном нулю, выбранный в блоке 15 период повторения импульсов через бл. 9 поступает на вход передатчика 2 и на первый вход приемника 1. При сигнале на выходе бл. 28, равном нулю, сигнал дальности с выхода дальномера через бл.8 поступает на второй вход приемника 1, дальномер производит слежение за дальностью цели.
При воздействии уводящей по D помехи сигналы с выхода приемника по доплеровской частоте и выхода бл. 10 по  начинают отличаться. При достижении разности определенной величины на выходе бл. 17 появляется сигнал, равный "1".
начинают отличаться. При достижении разности определенной величины на выходе бл. 17 появляется сигнал, равный "1".
Этот сигнал:
- запускает первый формирователь импульса бл. 25, вырабатываемый им импульс открывает четвертый управляющий ключ бл. 18, сигнал дальности с выхода бл. 10 вводится в ячейку запоминания 19;
- открывает третий управляющий ключ бл. 11; сигнал с выхода приемника начинает интегрироваться в бл. 12; сигналы с выхода интегратора 12 и с выхода бл. 19 суммируются в бл. 26, на выходе его - пролонгированное значение дальности до цели;
- переключает третий двуканальный переключатель бл.24; на выходе блока 24 появляется сигнал пролонгированной дальности до цели; на этом этапе дальномер (бл. 3, бл. 10, бл.15) производит слежение за сигналом помехи, на выходе устройства (выход бл. 24) пролонгированные значения дальности до цели.
При расхождении дальности на выходе управляющей части дальномера и пролонгированной дальности срабатывает бл. 23, что свидетельствует о том, что сигналы дальности помехи и цели разошлись на такую величину, что возможно попеременное слежение за целью и помехой.
Выходной сигнал бл. 23:
- переключает бл. 9, на входы передатчика и приемника поступают вычисленные значения периода повторения с блока 16;
- запускает счетчик времени бл.7;
- запускает второй формирователь импульсов бл.21.
В течение длительности сформированного импульса на выходе бл. 28 сигнал, равный единице, который:
- переключает бл. 8, на вход приемника поступает сигнал пролонгированной дальности до цели;
- переключает бл. 22, на приемный вход бл. 16 подается сигнал пролонгированной дальности до цели, на режективный вход бл. 16 подается сигнал дальности до помехи бл. 10; блок 16 выбирает так период повторения импульсов, что сигнал от цели окажется в зоне приема, а сигнал от помехи в зоне режекции; на выходе бл. 3 появляется сигнал рассогласования между дальностью до цели и ее пролонгированным значением;
- переключает двуполюсный переключатель 4; сигнал рассогласования ΔD через первый усилитель 5 поступает на первый вход первого сумматора 20;
- открывает управляющий ключ бл. 6, пролонгированное значение дальности через второй усилитель бл. 13 поступает на второй вход первого сумматора, на выходе бл. 20 формируется откорректированное значение дальности до цели (Dкор);
- открывает управляющий ключ бл. 27, значение Dкор заносится в ячейку запоминания 19 и на первый вход второго сумматора 26;
- обнуляет выходное значение интегратора, на выходе бл. 26 откорректированное в данный момент значение дальности до цели.
Процесс корректировки заканчивается при пропадании сигнала на выходе бл. 21. На выходе элемента ИЛИ бл. 28 появляется "0".
Этот сигнал:
- переключает бл. 8, на второй вход приемника поступает сигнал дальности до помехи с первого выхода бл. 10;
- переключает блок 22, на режективный вход бл. 16 поступает сигнал дальности до цели, а на приемный вход - дальность до помехи; бл. 16 вырабатывает такой период, что сигнал дальности до цели будет находится в зоне режекции, а сигнал помехи в зоне приема;
- отключает выход первого сумматора бл. 20 от ячейки запоминания;
- отключает выход бл.26 от второго усилителя бл.13;
- снимает обнуление с интегратора;
- переключает блок 4. Вырабатываемый блоком 3 сигнал рассогласования между сигналом помехи на выходе бл.10 и принятым сигналом помехи через бл.4 поступает на вход бл.10.
На этом этапе производится слежение за сигналом помехи и пролонгация дальности до цели.
Через время, определяемое счетчиком времени бл. 7 и пороговым устройством бл. 14, на выходе бл.14 появляется сигнал. На выходе бл.28 появляется "1", и аналогично ранее представленному производится процесс корректировки пролонгированного значения дальности до цели.
Сигнал с выхода бл.14 обнуляет счетчик времени, на выходе бл.28 появляется сигнал, равный нулю.
Устройство переходит на непрерывное слежение за помехой и пролонгацию дальности до цели, прерываемые корректировкой пролонгированного значения дальности до цели.
Если корректировку пролонгированной дальности до цели необходимо осуществлять несколько тактов, то между бл.14 и обнуляющим входом бл.7 необходимо установить линию задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА ВЫБОРКОЙ АМПЛИТУД | 1997 |
|
RU2117963C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1981 |
|
RU2081432C1 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
| СЛЕДЯЩИЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩИХ ПОМЕХ | 2000 |
|
RU2178895C1 |



Изобретение относится к радиолокации и может быть использовано в радиолокационных импульсно-доплеровских станциях непрерывного сопровождения целей, работающих в режиме высокой частоты повторения. Устройство осуществляет попеременное слежение за сигналом цели и сигналом помехи. С этой целью выбирается такой период повторения, чтобы сигнал, за которым производится слежение, был расположен в зоне приема, а второй - в зоне режекции. Технический результат заключается в повышении защиты от уводящей по дальности помехи. 5 ил.
Дальномер при воздействии помехи, уводящей по дальности, содержащий передатчик, последовательно соединенные приемник, временной дискриминатор, двуполюсный переключатель, управляющую часть дальномера, блок выбора периода повторения импульсов, соединенный через первый двуканальный переключатель со входом передатчика и первым входом приемника, первый выход управляющей части дальномера также соединен через второй двуканальный переключатель со вторым входом приемника, отличающийся тем, что введены последовательно соединенные первый усилитель, вход которого соединен с вторым выходом двуполюсного переключателя, первый сумматор, первый управляющий ключ, ячейка запоминания, второй сумматор, второй управляющий ключ и второй усилитель, выход которого соединен с вторым входом первого сумматора, последовательно соединенные третий управляющий ключ, вход которого соединен с вторым выходом приемника, и интегратор, выход которого соединен с вторым входом второго сумматора, последовательно соединенные первый формирователь импульсов и четвертый управляющий ключ, выход которого соединен со входом ячейки запоминания, а второй вход - с первым выходом управляющей части дальномера, блок селективного выбора периода повторения, выход которого соединен со вторым входом первого двуканального переключателя, устройство управления и коммутации, состоящее из последовательно соединенных первого устройства сравнения, первый вход которого соединен со вторым выходом приемника, а второй вход - со вторым выходом управляющей части дальномера, третьего двуканального переключателя, второго устройства сравнения, счетчика времени, порогового устройства, элемента ИЛИ, переключателя, два выхода которого соединены с двумя входами блока селективного выбора периода повторения, выход второго сравнивающего устройства соединен также с управляющим входом первого двуканального переключателя и через второй формирователь импульсов - со вторым входом элемента ИЛИ, выход которого также соединен с управляющими входами двуполюсного переключателя, первого и второго управляющих ключей, второго двуканального переключателя, с обнуляющим входом интегратора, выход второго сумматора соединен также с вторым входом третьего двуканального переключателя, вторым входом переключателя, третьим входом второго двуканального переключателя, первый выход управляющей части дальномера соединен также с третьим входом третьего двуканального переключателя, вторым входом второго устройства сравнения, третьим входом переключателя, выход первого устройства сравнения соединен также с управляющим входом третьего управляющего ключа и входом первого формирователя импульсов, выход порогового устройства соединен также с обнуляющим входом счетчика времени.
| Горгонов Г.И | |||
| Автоматическое сопровождение целей в бортовой радиолокационной станции с ЭВМ | |||
| - М.: Академия им.Жуковского, 1988, с.41 | |||
| ЛИЙ | 0 |
|
SU379889A1 |
| Частотно-временной дискриминатор | 1981 |
|
SU995041A1 |
| US 4079376 A, 14.03.78 | |||
| ВСТАВКА ПРОМЕЖУТОЧНОГО РЕЛЬСОВОГО СКРЕПЛЕНИЯ | 2010 |
|
RU2445417C1 |

