Изобретение относится к области управления соотношением ксмпонентов катализатора в процессе его приготов ления и может быть использовано, в частности, для управления соотношени компонентов катализатора .для полимеризации изопрена. Известен способ определения эквимолярного соотношения компонентов ко плексного катализатора по минимально му значению диэлектирческой проницаемости реакционной смеси 1. Недостатком известного способа яв ляется низкая динамическая точность стабилизации соотношения компонентов катализатора, связанная с инерционностью поиска минимума диэлектрической проницаемости, так как управляющее воздействие направлено на измене ние концентрации во всем значительно реакционном объеме.. Известен способ регулирования , экзотермической реакции путем стабилизации стехиометрического соотношеНИН компонентов изменением потока одного из компонентов в зону предварительного смешения по уменьшению пр ращения температуры в смесителе, в который подается поток недостающего компонента, до значения, близкого к нулевому значению 2. Недостатком известного способа является тоf что при воздействии на один из потоков, подаваемых в зону предварительного смешения / не удается достичь требуемой статической точности стабилизации соотношения компонентов . Наиболее близким по технической сущности к изобретению является способ управления соотношением компонентов комплексного катализатора в процессе его приготовления путем смешения компонентов с заведомым недостатком между дифференциальными датчиками физического параметра каташизатрра (диэлектрической проницаемости), связанного .экртремальной- зависимостью с соотношением компонентов и путем изменения расхода дополнительно по- даваемого компонента по изменению разности показаний дифференциальных щ&тчкков 3. Недостатком известного способа является низкая.стат11ческая точность стабилизации соотношения компонентов.i, так как способ предусматривает управление по нулевому значению разности показаний дифференциальных датчиков.
Установлено, что точность стабилизации заданного значения соотношения компонентов (соответствующего минимуivsy или максимуму зависимости физического параметра от соотношения компо.нентов катализатора) увеличивается, если управлять процессом не-по нулевому значению дифференциальной разнос{ги/ а по нулевому или близкому к нулевому значению приращения разности показаний дифференциальных Датчиков. Цель изобретения - повышение точнЬсти стабилизации заданного значения соотношения его компонентов.
Поставленная цель достигается тем, что расход дополнительно подаваемого недостающего компонента увеличи;вают,. в начале приготовления катализатора . от нулевого значения до значения, при котором приращение разности показаний дифференциальных датчиков достигает минимальной заданной или нулевой величины.
При этом стабилизируют заданное значение максимальной разности показаний дифференциальных датчиков или заданную величину расхода дополнительно подаваемого недостающего компонента катализатора изменением по-тока одного из компонентов, подаваемых в зону смешения компонентов катализатора.
В качестве контролируемого физического параметра катализатора используют температуру или оптическую плотность реакционной смеси.
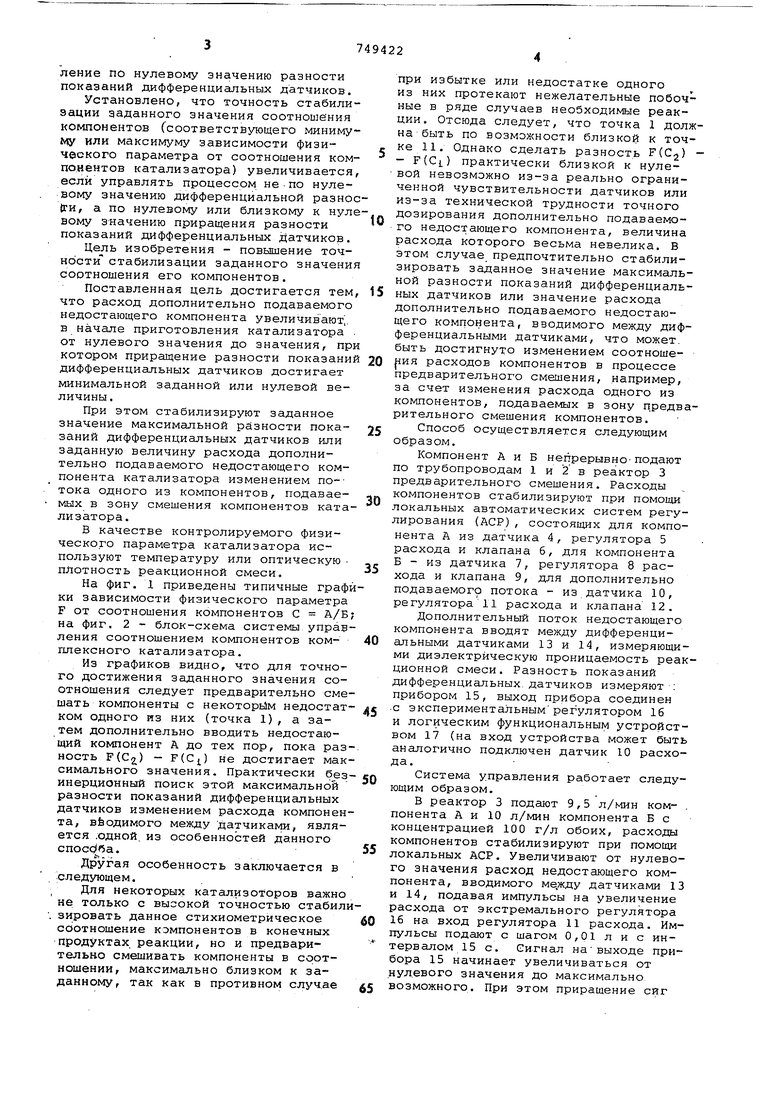
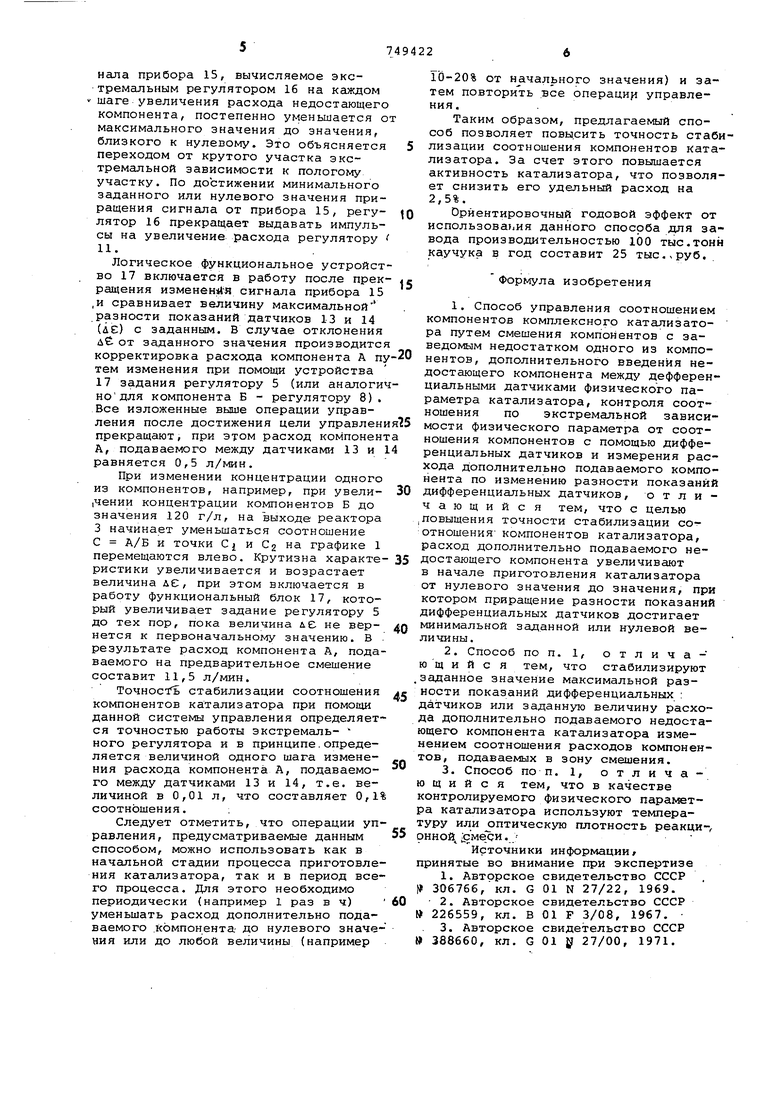
На фиг. 1 приведены типичные графики зависимости физического параметра F от соотношения компонентов С А/Б; на фиг. 2 - блок-схема системы,управления соотношением компонентов комплексного катализатора.
Из графиков видно, что для точного достижения заданного значения соотношения следует предварительно смешать компоненты с некоторым недостатком одного из них (точка 1), а затем дополнительно вводить недостающий компонент А до тех пор, пока разность F(C2) - F(CJL) не достигает максимального значения. Практически безинерционный поиск этой максимальной разности показаний дифференциальных датчиков изменением расхода компонента, вёодимого между датчиками, является .одной, из особенностей данного способа.
Другая особенность заключается в следующем.
Дня некоторых катализот оров важно не только с высокой точностью стабили . зировать данное стихиометрическое соотношение компонентов в конечных продуктах реакции, но и предварительно смешивать компоненты в соотношении, максимально близком к заданному, так как в противном случае
при избытке или недостатке одного из них протекают нежелательные побочные в ряде случаев необходимые реакции. Отсюда следует, что точка 1 должна быть по возможности близкой к точке 11. Однако сделать разность FCCj) - F(Cj.) практически близкой к нулевой невозможно из-за реально ограниченной чувствительности датчиков или из-за технической трудности точного дозирования дополнительно подаваемого недостающего компонента, величина расхода которого весьма невелика. В этом случае предпочтительно стабилизировать заданное значение максимальной разности показаний дифференциальных датчиков или значение расхода дополнительно подаваемого недостающего компонента, вводимого между дифференциальными датчиками, что может, быть достигнуто изменением соотноше 1ия расходов компонентов в процессе предварительного смешения, например, за счет изменения расхода одного из компонентов, подаваемых в зону цредварительного смешения компонентов.
Способ осуществляется следующим образом.
Компонент А и Б непрерывно- подают по трубопроводам 1 и 2 в реактор 3 предварительного смешения. Расходы компонентов стабилизируют при помощи локальных автоматических систем регулирования (АСР), состоящих для компонента А из датчика 4, регулятора 5 расхода и клапана 6, для компонента Б - из датчика 7, регулятора 8 расхода и клапана 9, для дополнительно подаваемог9 потока - из датчика 10, регулятора 11 расхода и клапана 12.
Дополнительный поток недостающего компонента вводят между дифференциальными датчиками 13 и 14, измеряющими диэлектрическую проницаемость реакционной смеси. Разность показаний дифференциальных, датчиков измеряют : прибором 15, выход прибора соединен С экспериментальнымрегулятором 16 и логическим функциональным устройством 17 (на вход устройства может быть аналогично подключен датчик 10 расхода.
Система управления работает следующим образом.
В реактор 3 подают 9,5 л/мин компонента А и 10 л/мин компонента Б с концентрацией 100 г/л обоих, расходы компонентов стабилизируют при помощи локальных АСР. Увеличивают от нулевого значения расход недостающего компонента, вводимого ме.жду датчиками 13 и 14, подавая импульсы на увеличение расхода от экстремального регулятора 16 на вход регулятора 11 расхода. Импульсы подают с шагом 0,01 л и с интервалом 15 с. Сигнал на-выходе прибора 15 начинает увеличиваться от нулевого значения до максимально возможного. При этом приращение сиг нала прибора 15, вычисляемое экстремальным регулятором 16 на каждом шаге увеличения расхода недостающего компонента, постепенно уменьшается о максимального значения до значения, близкого к нулевому. Это объясняется переходом от крутого участка экстремальной зависимости к пологому участку. По достижении минимального заданного или нулевого значения приращения сигнала от прибора 15, рагулятор 16 прекращает выдавать импульсы на увеличение расхода регулятору 11.. Логическое функциональное устройст во 17 включается в работу после прек ращения изменен:йЯ сигнала прибора 15 ,и сравнивает величину максимальной разности показаний датчиков 13 и 14 (де) с заданным. В случае отклонения д от заданного значения производится корректировка расхода компонента А пу тем изменения при помощи устройства 17 задания регулятору 5 (или аналоги но для компонента Б - регулятору 8) . Все изложенные выше операции управления после достижения цели управлен прекращают, при этом расход компонен А, подаваемого между датчиками 13 и равняется 0,5 л/мин. При изменении концентрации одного из компонентов, например, при увели|Чении концентрации компонентов Б до значения 120 г/л, на выходе реактора 3 начинает уменьшаться соотношение С А/Б и точки Cj и Cg на графике 1 перемещаются влево. Крутизна характе ристики увеличивается и возрастает величина де, при этом включается в работу функциональный блок 17, который увеличивает задание регулятору 5 до тех пор, пока величина де не вернется к первоначальному значению. В результате расход компонента А, пода ваемого на предварительное смешение составит 11,5 л/мин. Точности стабилизации соотношения компонентов катализатора при помощи данной системы управления определяет ся точностью работы экстремального регулятора и в принципе.определяется величиной одного шага изменения расхода компонента А, подаваемого между датчиками 13 и 14, т.е. величиной в 0,01 л, что составляет 0,1 соотношения. Следует отметить, что операции уп равления, предусматриваемые данным способом, можно использовать как в начальной стадии процесса приготовле ния катализатора, так и в период все го процесса. Для этого необходимо периодически (например 1 раз в ч) уменьшать расход дополнительно подаваемого .компонента до нулевого значе ния или до любой величины (например 10-20% от начального значения) и затем повторить все операции управления. Таким образом, предлагаемый способ позволяет повысить точность стабилизации Соотношения компонентов катализатора. За счет этого повышается активность катализатора, что позволяет снизить его удельный расход на 2,5%. Ориентировочный годовой эффект от использова ия данного способа для завода производительностью 100 тыс.тонн каучука в год составит 25 тыс.,руб. Формула изобретения 1. Способ управления соотношением компонентов комплексного катализатора путем смешения компонентов с заведомым недостатком одного из компонентов, дополнительного введения недостающего компонента между дефференциальными датчиками физического параметра катализатора, контроля соотношения по экстремальной зависимости физического параметра от соотношения компонентов с помощью дифференциальных датчиков и измерения расхода дополнительно подаваемого компонента по изменению разности показаний дифференциальных датчиков, отличающийся тем, что с целью повышения точности стабилизации соготношения компонентов катализатора, расход дополнительно подаваемого недостающего компонента увеличивают в начале приготовления катализатора от нулевого значения до значения, при котором приращение разности показаний дифференциальных датчиков достигает минимальной заданной или нулевой величины, 2.Способ по п. 1, отличаю щ и и с я тем, что стабилизируют заданное значение максимальной разности показаний дифференциальных : датчиков или заданную величину расхода дополнительно подаваемого недостающего компонента катализатора изменением соотношения расходов компонентов, подаваемых в зону смешения. 3.Способ по п. 1, отличающийся тем, что в качестве контролируемого физического параметра катализатора используют температуру или оптическую плотность реакции онной . Источники информации/ принятые во внимание при экспертизе 1. Авторское свидетельство СССР . I 306766, кл. G 01 N 27/22, 1969. 2. Авторское свидетельство СССР 226559, кл. В 01 Р 3/08, 1967. 3. Авторское свидетельство СССР 388660, кл. G 01 у 27/00, 1971.
F(()
F(c f(Ci
F(c)
F(4l F(CS)
Ci QS , ftfu.S. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом измельчения в вентилируемой шаровой мельнице | 1980 |
|
SU948453A1 |
| Способ управления процессом каталитического риформинга | 1989 |
|
SU1693025A1 |
| Способ регулирования процесса полимеризации сопряженных диенов | 1981 |
|
SU979379A1 |
| Способ регулирования процесса полу-чЕНия пОлибуТАдиЕНА | 1979 |
|
SU840046A1 |
| Способ регулирования процесса растворной полимеризации сопряженных диенов | 1979 |
|
SU785323A2 |
| Способ управления реакторным блоком установки каталитического риформинга | 1983 |
|
SU1154313A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОЛУЧЕНИЯ ЦИС-1,4-ПОЛИИЗОПРЕНА | 1992 |
|
RU2041886C1 |
| Способ регулирования процесса полимеризации изопрена | 1974 |
|
SU533603A1 |
| Способ регулирования процесса растворной полимеризации бутадиена | 1988 |
|
SU1627540A1 |
| Способ регулирования процесса полимеризации бутадиена | 1980 |
|
SU922111A1 |
Фи-.З
ри.ъа.и,и.ю
