(54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ . В ВЕНТИЛИРУЕМОЙ ШАГОВОЙ ME ЛЬНИ IE
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления загрузкой мельницы многокомпонентной шихтой | 1977 |
|
SU737010A1 |
| Способ управления загрузкой шаровой мельницы | 1975 |
|
SU538736A1 |
| Способ автоматического управления процессом помола в вентилируемой шаровой мельнице | 1977 |
|
SU685335A1 |
| Способ управления процессом измельчения в мельнице замкнутого цикла | 1980 |
|
SU980832A1 |
| Способ управления процессом измельчения в мельнице замкнутого цикла | 1987 |
|
SU1477474A1 |
| Способ автоматического управления процессом помола в мельнице сухого измельчения | 1980 |
|
SU948452A1 |
| Способ автоматического определения режима перегрузки шаровой мельницы | 1978 |
|
SU772588A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ В БАРАБАННОЙ МЕЛЬНИЦЕ | 1992 |
|
RU2062656C1 |
| Устройство для автоматического управления процессом помола в вентилируемой шаровой мельнице | 1980 |
|
SU939082A1 |
| Способ управления загрузкой мельницы замкнутого цикла с бункером и дозатором для недоизмельченного материала | 1977 |
|
SU733733A1 |
1
Изобретение относится к автоматизации процессов измельчения и может быть Использовано в отраслях, применяющих измельчение материалов.
Известны способы управления процессом измельчения в шаровой мепьшще, заключающиеся в экстремальном регулировании производительности мельницы, фиксации аварийных перегрузок, их предотвращении путем временного исютючения экстремального регутшрования и осушествяении определенного воздействия для снижез шя расхода материала ll .
Такой способ не обеспечивает выхода мельницы из аварийных перегрузок за один шаг, что приводит к дополнительным потерям производительности.
К предлагаемому способу наиболее близок способ управления процессом измельчения в вентилируемой шаровой мельшще, включаюший экстремальное регулирование производительности, фиксацию аварийных перегрузок, при их появлении BpeiMeimoM исключение экстремального регулирования и изменение величины расхода исходного материала до ветичикы, равной прогнозируемой величине расхода готового продукта 2 ,
Недостаток этого способа заключается в том, что при экстремальном регулировании найподаются потери на определение э сстремума, что пр1тодит к потере производительности мельницы. Потери на определение являются общим свойством
10 экстремальных систем, при этом их нельзя свести к нулю из-за противоречивости требований к параметрам экстремального регулирования, которые должны обеспечивать минимум потерь на поиск и на ределенне.
Цель изобретения - повышение качества управления.
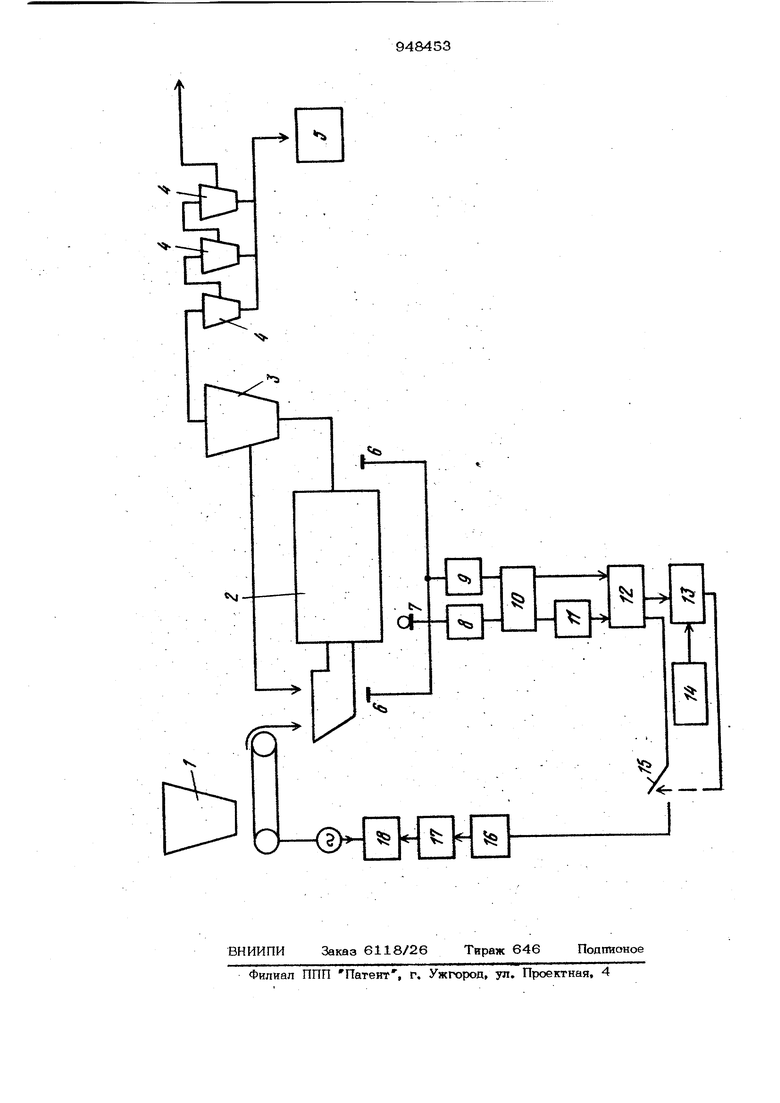
Поставленная цель достигается тем, что в способе управления процессом иэ20мельчения в вентилируемой шаровой M€smr нице, включающем экстремальное регулирование производительнооти, фиксацию аварийных перегрузок, при их появлении временное исключе1ще экстремального регулирования и изменение расхода исхО)аного материала до величины, равной прогнозируемой велкчтше расхода готового продукта, при экстремальном регулировании фиксируют достижение максимума производительноста, после чего исключают экстремальное регулирование, стабилЕзируют найденную величину производительности и вычисляют приращение величины, характеризующей изменение cocTOsnfflfl мельн1щы, а включение экстремального регулирования осуществляют при превьпиении абсолютной величины приращения заданной величины, при этом направление начального шага определяют по знаку прирашошя. Кроме того, доиошштельно измеряют аэродинамическое сопротивление и размалыва емкость материала, а величину приращения, характеризующую изменение сост6$шия мепьниггы, вычисляют как величину приращения разности аэродинамического сопротивления мельницы и размаяываемос ти материала. Способ состоит в следующем. Состояние объекта управления на каждый момент времош характеризуется наблюдаемьгми переменными. Измеряя ращения величин переменных или их различных комбинаций за интервал времени, определяемый спектром частот возмущени и сравнивая эти пр1фащения с заданными значениями, можно определять, в каком состоянии находится объект. Если приращения по абсолютной величине меныде заданных, то значит объект находится в установившемся оптимальном режиме, пробных (рабочих) щагов соверщать не надо и для обеспечения работы объекта в этом режиме достаточно контуров стабилизаощи. В случае превыщения абсолютных величгш приращений заданных значений включается экстремальное регулирование и делается пробный (рабочий) щаг в направлении, определяемом знаком приращений. После нахождения оптимйльной степени загрузки мельницы работа экстре тального регулятора нецелесообразна, поскольку она приводит к потерям производительнос ти на определение. Чтобы этого избежать необходимо исклю-чить экстремальное регу Л1фование и оставить в работе только кон тур стабиплзашп найденной экстремаль ным регулятором оптимальной степени загрузит мельницы. При изменеш«5 физических свойств материала 1ь-пт состс)Я1гая оборудования изме 94 няются условия помола в мельнице, что приводит к изменешпо степени загрузки мельницы, которая контролируется по показаниям различ1{ых датчиков или вычисляется по их комбинациям в зависимости от типа мельницы. Например, в мельницах самоизмельчения степень загрузки ко1{тролируется по электроакустическому датчику и датчику мощности пртгоода мельницы, в сепараторнь1Х мельницах с центральной разгрузкой - по электроакустическому датчику и датчику мощности привода элеватора. Величина загрузки вентилируемой мельницы характеризуется показаниями датчика аэродинамического сопротивления мельшщы и электроакустического датчика. При условии работы контура стабилиза НИИ оптимальной скорости пылевоадушного потока показания датчика аэродинамического сопротивления мельницы отражают, уровень загрузки мельницы и не зависят от фкЕЗИческих свойств измельчаемого материала. Показания электроакутисческого датчика отражают не только уровень загру&кн мельшщы, но и изменения физических характеристик материала: способности к размалътанию, влажности, крупности. Если на некотором интервале времени вычисляют разность показаний датчика аэродинамического сопротивления мельницы и электроакустическогч) датчика со своими весовыми коэффициентами, то приращение загрузки мельшщы, отражающееся в показаниях этих датчиков, будет компенсироваться. Таким образом, величина разности будет отражать изменения физических характеристик материала, т.е. возмущений, приводящих к дрейфу экстремальной характеристики. Вычислив приращение этой раотости на текущем интервале по сравнению с предыдущим и сравнив величину приращения с величиной, можно на основании этого сделать вывод о необходимости включения экстремального регутгирования. Задавшая величина должна выбираться экспериментально, исходя из особенностей процесса помола на конкретном заводе. При превыщении величины приращения заданной величтат включают экстремальное регулирование, а если приращение меньше, то продолжает работать только один контур стабилизации загрузки мельницы. Таким образом, если не нарушаются условия помола в мельнице под действием воамушезтй, мелыпща работает в оптимальном режиме без потерь на определение. Для отслеживания дрейфа экстремальной характертстики интервал времени, за который вычисляется приращение разности показаний датчиков, можно выбирать сравнимым с временем переходного процесса в мельнице. Направление начального шага при включении экстремального регулирования определяется знаком приращения. : На чертеже изображена блок-схема устройства для осуществления предлагаемого способа. Блок-схема устройства работает следующим образом. Измельчаемый материал из бункера 1 подается в мельницу 2, где измельчается и выносится пылевоздушным потеком в сепаратор 3, в котором разделяется на .готовый продукт и крупку. Готовый про1дукт осаждается в шпотонах 4 и поступарт в силос 5, а крупка возвращается на вход мельщщы для домопа. При работе экстремального регулятора могут возникать аварийные перегрузки. Эти перегруэ ки 4нксируются и при их появлении контур экстремального регулятора отключают. После этого измеряют скорость изме нения расхода готового продукта, прогнозируют расход готового продукта на время прохождения материала через мельницу, исходя из этой скорости, и устанавливают значение расхода исходного мате рваала в мельницу, равным прогнозируемо му значению расхода (эти операции на чертеже, поясняющем работу устройства, ие отражены). По окончании переходного процесса снова включается экстремальное регулирование. Допустим, что в прссессе работы экстремального регулятора была найдена максимальная производительность мельницы и экстремальное регулирование отключили, оставив в работе контур стабилизации загрузки мельницы. Показания датчиков 6 аэроШНамического сопрютивления мепышцы и электроакустического датчика 7, характеризующих уровень загрузки мельницы, сглаживаются фгоштра- ми 8 и 9 и подаются на сумматор 10, где вычисляется разность показаний этих ;штчнков. Величина разности, характеризующая измене1ше условий помола в мельнице в результате изменения физических характеристик материала, подает ся на вход блока 11 задержки и суммат 12. Блок 11 осуществляет задержку величины разности на шггервал времени. определя емый из анализа спектра частот возмущений. В суьтматоре 12 вычисляется величина приршцезшя разности показаний датчиков за интервал врекдани. В блоке 13 абсолютная вешгчина приращения сравнивается с заданной величиной задатчика 14. Если величина пряграения меныие заданной, то экстремальное регулирование остается отключенным. При превышении величины приращения за данной величины блок 13 замыкает контакт 15 переключателя режима управления. В этом случае величина пряфащения поступает в блок 16, в котором анализируется : знак приращения. Например, произощло ухудшение размалываемости материала. В результате этого величина показаний датчика 7 уменьшится, величина разности показаний датчиков 6 и 7 увеличЕГгся, следовательно знак приращения будет положительным. Знач1гг произошло ухудшение условий помола в мельнице и экстремальный регулятор 17 делает начальный шаг изменения задания регутштору 18 стабЕпизацки загрузки мельницы в сторону уменьшения, т.е. отрицательньп л. Затем экстремальный регулятор отслеж1гоает дрейф экстремальной характеристики, находит норую максимальную производительность при иамешшшихся физических характеристиках материала, далее экстремальное регулирование отключается и цикл операций повторяется. Применение предлагаемого способа позволит повысить качест-БО управления. Вьшотппь устройство, реализующее этот способ упра вления, можно с по- мошью элементов локальной автоматики или УВМ. Формула изобретен ия 1. Способ управления процессом иэмельчения в вентилируемой шаровой мельнице, включающей экстремальное регулирование производительности, фиксашоо аварийных перегрузок, при их появлении временное ис1шючение экстремального регулирования и изменение вегоппшы расхода исходного материала до величины, равной прогноз1фуемой величине расхода готового продукта, отличающийся тем, чго,|,с целью повьш ения качества управления, при экстремальном регулировании ф1гксируют достижение максимума производительности, после чего исключают экстремальное регулирование, стабилизируют найденную ведаршну производйтельносук и вычисляют пфиращение вепкчвны, характеря- зукяцей KSvieHeHjie ссютойния мепышиы, а включение экстремалъното регзгатар жаНЕя осуществляют при превьпиеиии абсолютной ветЕЕРШНы приращения заданной вепюяны, при этом направпеэюяе начапьжюго шага определяют по знаку прираше кия.
раэмапываемость материала, а величину прирашешш, характеризующую изменение СОСТ05ШИЯ мельницы, вычисляют 1ШК величину приращения разности аэродинамического сопротивления мельницы и раэмаяываемости материала.
Источники информации, принятые во внимание при экспертизе
& 622497, кл. В 02 С 25/ОО/1978.
Csj.
Ss
0|-
C-J
