Измерительные наконечники 1 расположены на основании 2, которое связано с координатной кареткой 3, образованной плоскими пружинами 4, платой 5 и основанием 2. Плата 5 скреплена с платой б, которая вмест с плоскими пружинами 7 и платой 8 образует координатную каретку 9. Плкие пружины 7 повернуты на 90° относительно пружин 4. Плата 8 скреплена с угольником 10, который через горизонтально расположенные пружины 11 связан с платой 12, жестко скрепленной с корпусом 13, образуя координатную каретку 14.
Каретки 3, 9 и 14 образуют механическую систему координат XYZ. Каретка 14 перемещается при помощи пружин 7 в направлении оси Х{Х - ос перпендикулярная к плоскости чертеж на фиг. 1) и вместе с кареткой 14 в направлении ocHZ. Каретка 3 перемещается посредством пружин 4 в направлении оси Y и вместе с кареткми 9 и 14 - в направлениях осей ,Х и.Z.
Таким образом обеспечивается возможность перемещения измерительных наконечников 1 в пространственной системе координат XYZ.
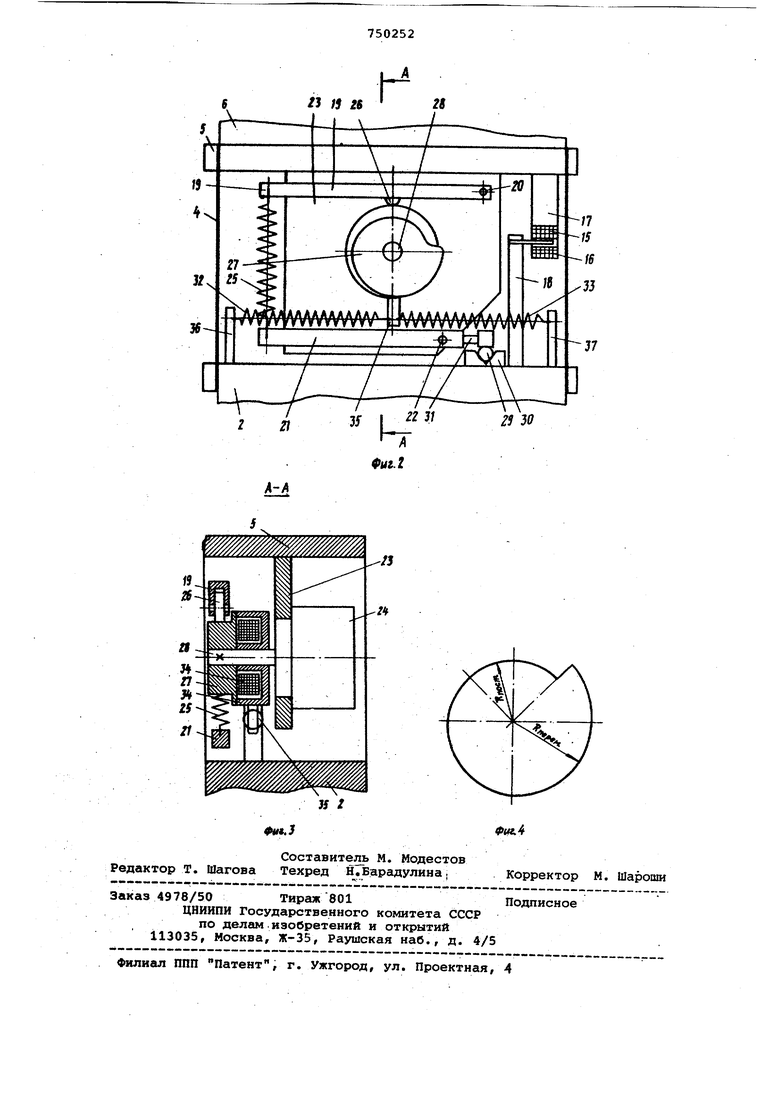
В каж,дую каретку встроен настроечный узел и узел для создания измерительного усилия, как это показано на фиг. 2. Настроечный узел содержит измерительный индуктивный преобразователь перемещения каретки и прецизионный стопор.
Индуктивный преобразователь состоит из якоря 15 и катушки 16, установленной на кронштейне 17, прикрепленном к плате 5. Якорь закреплен на стойке 18, установленной на основании 2.
CTOrtop содержит рычаг 19, установленный на опоре 20, и рычаг 21, установленный на опоре 22. Опоры 20 и 22 закрепленына кронштейне 23, на котором также закреплен шаговый электропривод 24. Рычаги 19 и 21 связаны между собой пружиной 25. На рычаге 19 установлен ролик 26, взаим.действующий с кулачком 27, закреп.,ленным на валу 28 электропривода.
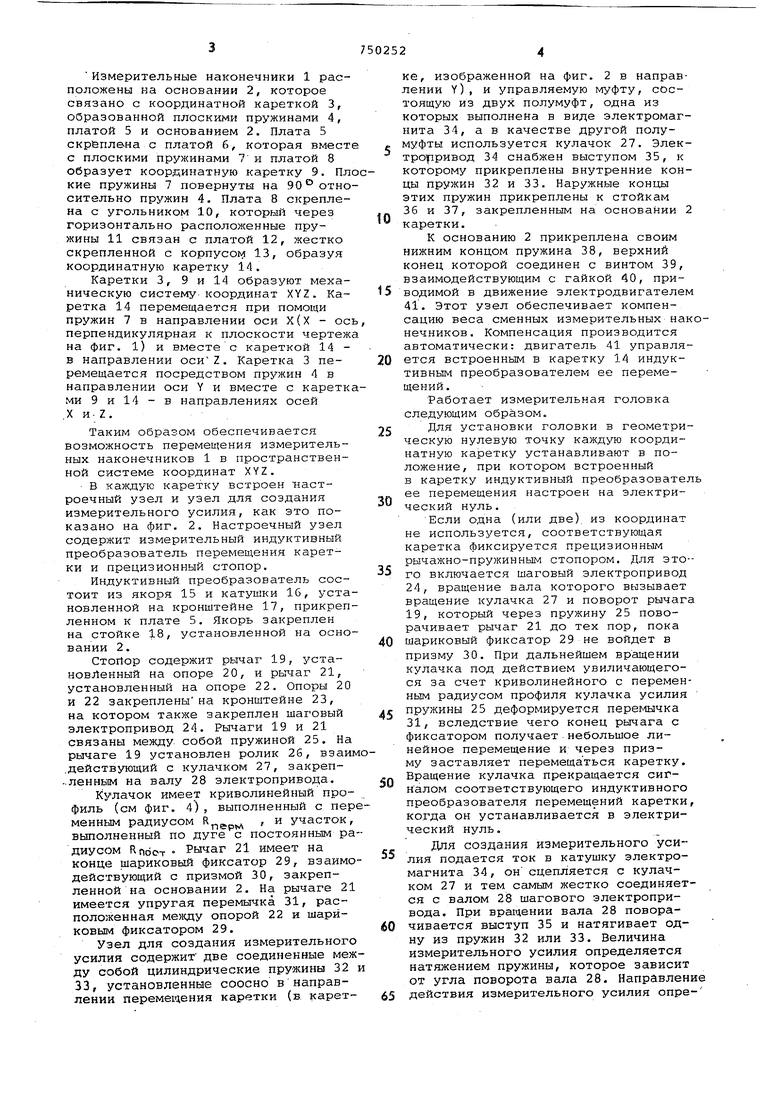
Кулачок имеет криволинейный профиль (см фиг. 4), выполненный с перменным радиусом , и участок, выполненный по дуге с постоянным радиусом RfidcT Рычаг 21 шчеет на конце шариковый фиксатор 29, взаимодействующий с призмой 30, закрепленной на основании 2. На рычаге 21 имеется упругая перемычка 31, расположенная между опорой 22 и шариковым фиксатором 29.
Узел для создания измерительного усилия содержит две соединенные между собой цилиндрические пружины 32 33, установленные соосно внаправлении перемещения каретки (в каретке, изображенной на фиг. 2 в направлении Y), и управляемую муфту, состоящую из двух полумуфт, одна из которых выполнена в виде электромагнита 34, а в качестве другой полумуфты используется кулачок 27. Электрорривод 34 снабжен выступом 35, к которому прикреплены внутренние концы пружин 32 и 33. Наружные концы этих пружин прикреплены к стойкам 36 и 37, закрепленным на основании 2 каретки.
К основанию 2 прикреплена своим нижним концом пружина 38, верхний конец которой соединен с винтом 39, взаимодействующим с гайкой 40, приводимой в движение электродвигателем 41. Этот узел обеспечивает компенсацию веса сменных измерительных накнечников. Компенсация производится автоматически: двигатель 41 управляется встроенным в каретку 14 индуктивным преобразователем ее перемещений.
Работает измерительная головка следующим образом.
Для установки головки в геометрическую нулевую точку каждую координатную каретку устанавливают в положение, при котором встроенный в каретку индуктивный преобразовател ее перемещения настроен на электрический нуль.
Если одна (или две), из координат не используется, соответствующая каретка фиксируется прецизионным рычажно-пружинным стопором. Для этого включается шаговый электропривод 24, вращение вала которого вызывает вращение кулачка 27 и поворот рычага 19, который через пружину 25 поворачивает рычаг 21 до тех пор, пока шариковый фиксатор 29 не войдет в призму 30. При дальнейшем вращении кулачка под действием увиличающегося за счет криволинейного с переменным радиусом профиля кулачка усилия пружины 25 деформируется пере1 1ычка 31, вследствие чего конец рЕлчага с фиксатором получает небольшое линейное перемещение и через призму заставляет перемещаться каретку. Вращение кулачка прекращается сигналом соответствующего индуктивного преобразователя перемещений каретки, когда он устанавливается в электрический нуль.
Для создания измерительного усилия подается ток в катушку электромагнита 34, он сцепляется с кулачком 27 и тем самым жестко соединяется с валом 28 шагового электропривода. При вращении вала 28 поворачивается выступ 35 и натягивает одну из пружин 32 или 33. Величина измерительного усилия определяется натяжением пружины, которое зависит от угла поворота вала 28. Направлени действия измерительного усилия определяется направлением вращением вала 28. При создании измерительного усилия используется электропривод (шаговый электропривод 24) стопора. Стопор при этом не работает, что об печивается наличием на профиле кула ка (см. фиг. 4) участка с постоянны ращиусом. Формула изобретения Трехкоординатная измерительная головка, содержащая корпус, связанные между собой и с корпусом с возможностью относительного перемещени координатные каретки, одна из которых несет по крайней мере один изме рительный наконечник, настроечные узлы для установки кареток головки в геометрическую нулевую точку, каж дый из которых включает встроенный в соответствующую каретку измерительный преобразователь перемещений каретки, например индуктивный прецизионный пружинно-рычажный стопор, кинематически связанный с ним электропривод, кулачок, установленный на валу привода и воэдействукядий на пружину стопора, и узлы для создания переменного по величине к направлению измерительного усилия по каждой координате, отличающаяся тем, что, с целью упрощения конструкции путем использования электропривода для создания измерительного усилия и стопорения кареток, каждый узел для создания измерительного усилия встроен в соответствующую каретку и выполнен в виде цилиндрических пружин, установленных соосно в направлении перемещения ка1ретки и скрепленных противоположными концами с кареткой, а общими концами между собой и через управляемую муфту - с валом электропривода, электропривод выполнен шаговым, а профиль кулачка имеет участок, выполненный по дуге постоянного радиуса. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ 2242355, кл. 42 в 12/01 (G 01 В 5/00), 1972 (прото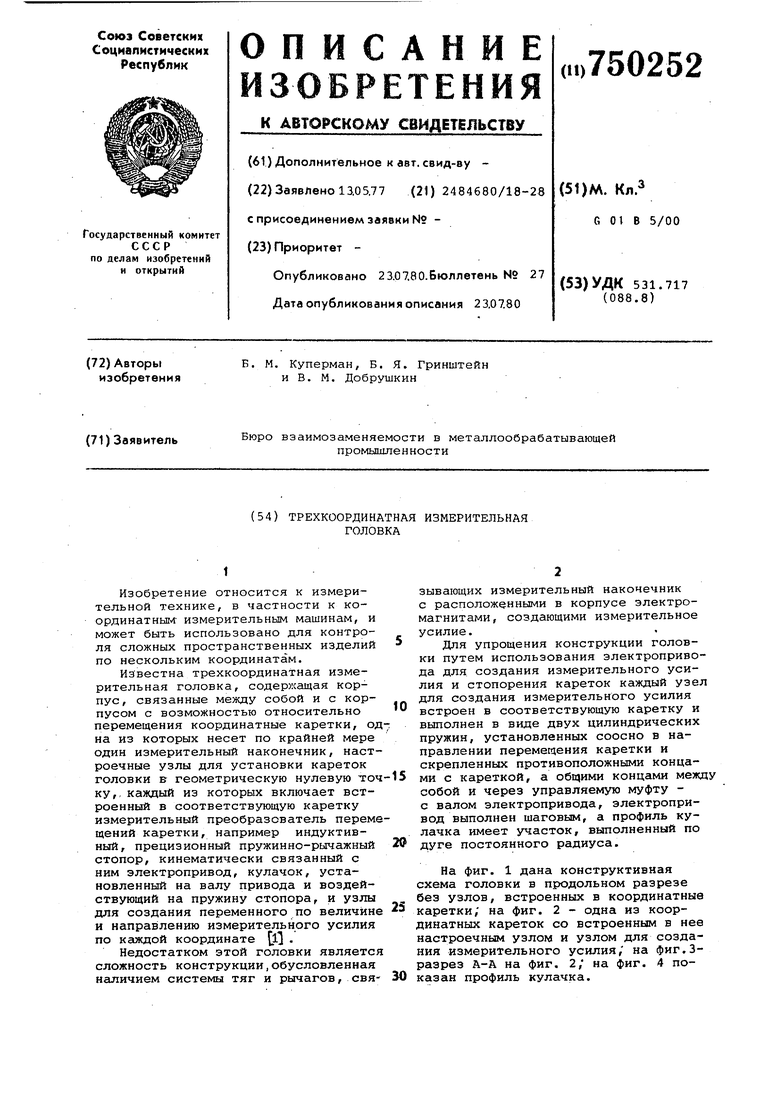

| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатная измерительная головка | 1990 |
|
SU1796865A1 |
| Координатная измерительная головка | 1990 |
|
SU1783273A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| ПАЯЛЬНАЯ ГОЛОВКА АВТОМАТА ПАЙКИ ЭЛЕКТРОЭЛЕМЕНТОВ НА ПЕЧАТНЫЕ ПЛАТЫ | 2009 |
|
RU2426284C2 |
| Полуавтомат для обработки деталей типа полусфер | 1972 |
|
SU477826A1 |
| РЕОМЕТР ДЛЯ КОНТРОЛЯ ОБРАЗОВАНИЯ КИСЛОТНО-СЫЧУЖНОГО СГУСТКА | 2005 |
|
RU2304280C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ НА ИЗНОС | 1991 |
|
RU2020459C1 |
| Установка для автоматической сварки замкнутых швов с радиусными скруглениями | 1982 |
|
SU1038161A1 |
| Привод,преимущественно для устройства запрессовки штырей в плату | 1981 |
|
SU1075457A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ЭЛЕКТРОННЫХ КОМПОНЕНТОВ НА ПЛАТУ | 1991 |
|
RU2072646C1 |