(54) ИНДУКТИВНАЯ ДВУХКОНТАКТНАЯ ИЗМЕРИТЕЛЬНАЯ
1
Изобретение относится к измерениям неэлектрических величин электрическими методами и может быть использовано в системах контроля линейных размеров деталей на станках и автоматических линиях.
Известны двухконтактные измерительные головки для контроля линейных размеров деталей. 1.
Однако такие головки не обладают достаточной точностью.
Наиболее близким по технической сущ-ности к изобретению является индуктивная двухконтактнея измерительная головка, содержащая щупы, держатели щупов, корпус, внутри которого расположены упруго-кинематический узел (УПК), выполненный в виде двух имекхцих подвижные опоры пружинных параллелограммов, расположенных в параллельных плоскостях, и индуктивный преобразоБате,пь перемещения, выполненный в виде сердечника с обмоткой и якоря, при этом сердечник и якорь установлены на держателях 23.
ГОЛОВКА
Однако известная измерительная головка имеет достаточно сложную кинематику, вызванную необходимостью обеспечения параллельности держателей щупов относительно оси центров станка, контактные переходы между элементами кинематики создают условия возьшкновения лифтоЕц что отрицательно сказывается на точности контроля.
Кроме того, глухой герметичный корпус известной измерительной головки создает неудобства при осмотре и ремонте.
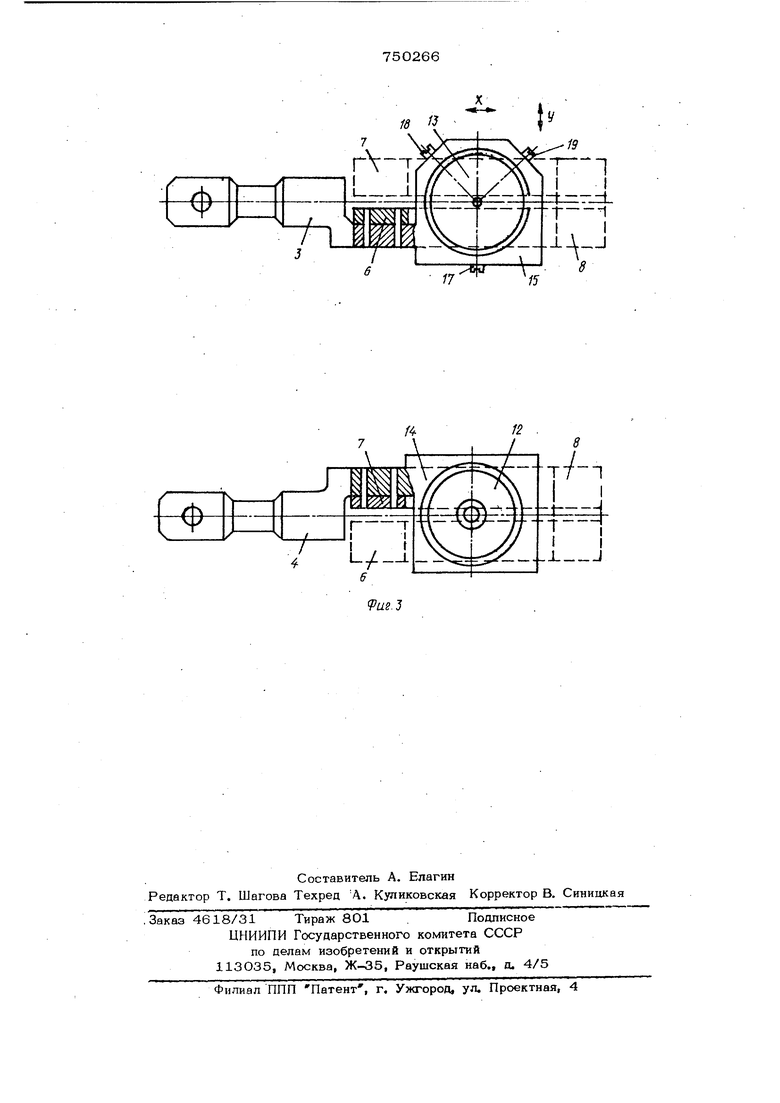
Для повышения точности контроля держатель сердепшка прикреплен к середине подвижной опоры одного из параллелограммов, держатель якоря-к середине подвиж-ной опоры другого параллелограмма, а держатели щупов жестко связаны с подвижными опорами. Кроме того, якорь измерительной головки закреплен на держателе с возможностью перемещения при регулировке в трех взаимно перпендикулярных иаправлениях, корпус выполнен О-образной формы с двумя боковыми съемными крыигками, а пержатепи шупов расположены в плоскости симметрии головки. На фиг, 1 схематически изображена предлагаемая индуктивная авухконтактная измерительная головка при снятой боковой крышке корпуса, вид сбоку на фиг. 2 дан разрез А-А на фиг. Ij на фиг. 3 показано крепление верхнего и нижнего держателя щупов, броневого сердечника и якоря. Измерительная головка содержит щупы 1 и 2, держатели 3, 4 щупов 1 и 2, корпус 5, внутри которого расположен упруго-кинематический узел, выполненный в виде двух имеющих подвижные опоры 6 и 7 пружинных параллелограммов. Правый параллелограмм (по стрелке Б) образует неподвижная стойка 8, две плоские упругие ленты 9 и 1О и подвижная опора 6, а левый параллелограмм - неподвижная стойка 8, упругие ленты 11, 12 и ПОДВЙЖ ная опора 7. Параллелограммы расположенны рядом в параллельных плоскостях. Индуктивный преобразователь перемещения выполнен в виде броневого сердечника 13 с обмоткой и якоря 14 дисковой формы. При этом сердечник 13 и якорь 14 установлены на соответствующих держателях 15 и 16. Держатель 15 броневого сердечника 1 с.обмоткой прикреплен к середине подвиж ной опоры 7 левого параллелограмма, а . держатель 16 якоря 14 - к середине под вижной опоры 6 правого параллелограмма. Рабочий воздушный зазор а и середины подвижных опор 6 и 7 расположены в одной плоскости с осью станка В-В. Якорь 14 (см. фиг, 3) устанавливается в держателе 16 тремя винтами 17, IB 19. С подвижной опорой 6 соединен держатель 3 верхнего щупа 1, а с подвижной опорой 7 - держатель 4 нижнего щупа 2. Держатели 3 и 4 щупов 1 и 2 расположены в плоскости симметрии головки, перпендикулярной к оси центров станка В-В. Корпус головки 5 имеет две съемны крышки 20 и 21. Герметизация головки обеспечивается двумя резиновыми проклад ками 22 и 23 и манжетами 24. Головка для соединения на станке с гидрокареткой имеет ласточкин хвост 25, Измерительная головка работает следующим образом. После подачи головки в рабочее положение с помощью гидрокаретки (на чертеже не показана) щупы 1 и 2 расходятся, вызывая взаимно противоположное-смещение подвижных опор 6 и 7, а следователь но, соединенных с ними держателей 15 и 16. Рабочий воздушный зазор а увеличивается, что приводит к уменьшению индуктивности катушки, расположенной в броневом сердечнике 13, По мере снятия припуска на обработку детали уменьшается зазор Д, вызьтая увеличение индуктивности. Изменение индуктивности преобразуется-в электрический сигнал управления автоматикой станка. Настройка головки вначале производится на 7арировочном устройстве, позволяющем производить точное смещение щупов 1 и 2 в вертикальном направлении. Щупы 1 и 2 подвижными элементами тарировочного устройства раздвигаются на 0,10,2 мм. Винты 17, 18 и 19 освобождаются и якорь 14 дисковой формы опускается ьа броневой сердечник 13 с обмот- «кой до полного соприкосновения. Поочередной регулировкой винтов 17, 18 и 19 по йоказанйям измерителя индуктивности, подключенного к выводам катушки, устанавливается максимальное-значение индуктивности датчика. Максимальное значение индуктивности соответствует соосному положению броневого сердечника 13 и якоря 14. В этом положении якорь 13 фиксируется винтами 17, 18 и 19. Затем с помощью тарировочного устройства добиваются нулевого раскрытия индуктивного датчика т.е. установки начального рабочего воздушного зазора а, соответствукяцего определенному значению индуктивности. Динамометром поочередно измеряются усилия на щупах 1 и 2. Если они отличаются от 110 i 10 г, регулировка повторяется вновь в указанном порядке, Две, три операции регулировки позволяют установить плоскопараплельность полюсов и соосность броневых сердечников, а также нулевое раскрытие датчика при определенном значении измерительного усилия на щупах. На станке .обеспечение заданного раскрытия нуля датчика и значений измерите/ПзНых усилий производится регулировочными винтами щупов 1 и 2 (см. ;фиг. 1). Расположение элементов индуктивного преобразователя внутри пространства параллелограммов и выбор мест крепления держателей 15 и 16 броневого сердечника и якоря в середине подвижных опор 6 и 7, расположенных как и рабочий воздушный зазор в одной плоскости с осью центров станка В-В, позволяет весьма точно выполнить условие гермокомпенсации размерных цепей головки. Вывод держателей 3 и 4 щупов 1 и 2 иа корпуса 5 в плоскости симметрии головки, перпендикулярной к оси центров станка В-В, уменьша- ет число контактных переходов в щупах, влиякщих на точность работы головки в динамическом режиме. Крепление диска магнитопровода в держателе с возможнос тью перемещения при регулировке в трех взаимно перпендикулярных направлениях X, у , Ji (см. фиг. 1 и 3) винтами 17, 18 и 19 устраняет влияние несоосности при использовании стандартных оте чественных броневых сердечников на характеристику индуктивного-преобразовател Возможность смещения одного из броневы сердечников по оси упрощает регулировку измерительного усилия на шупах и установку нулевого раскрытия элементов индуктивного преобразователя после изготов ления или ремонта. Увеличение простым способом диапазона регулировки измерительных усилий на щупах в 1,5-2 раза повышает точность работы головки в усло ВИЯХ больших вибрационных нагрузок в нормальном и перевернутом на 18О положении. Размещение элементов головки, соединенных между собой как указано выше,-в i О-образном герметичном корпусе с оэумя боковыми съемными крышками улучшает р емок госпосо бность. Для ремонта и замены броневых сердечников из ферритов не требуется снятия резиновых манжет с держателей щупов, замена броневых сердечников производится без разборки элементов пружинных параллелограммов, сборка и юстировка, ко- -вторых относится к самым трудоемким опе фациям при ремонте прототипа. 7 66 Формула б р р т е н и я 1. Индуктивная двухконтактная изме- ;ритёльная головка, содержащая щупы, держатели щупов, корпус, внутри которого расположены упруго-кинематический узел, выполненный в виде двух имеющих подвижные опоры пружинных параллелограммов, расположенных в параллельных плоскостях, и индуктивный преобразователь перемещения, выполненный в виде сердечника с обмоткой и якоря, установленных на держа- теле сердечника и держателе якоря, отличающаяся тем, что, с целью повышения точности, держатель сердечника прикреплен к середине подвижной опоры одного из параллелограммов, держатель якоря - к середине подвижной опоры другого параллелограмма, а держатели щупов жёстко связаны с подвижными опорами. 2.Головка по п. 1, отличающая с я тем, что якорь закреплен на держателе с возможностью перемещения при регулировке в трех взаимно перпендикулярных направле1шях. 3.Головка по п. 1, отличающая с я тем, что корпус выполнен Орбразной формы с двумя боковыми съемными крышками, а держатели щупов расположены в плоскости симметрии головки. Источники информации, принятые во внимание при экспертизе 1.Скобы БВЭ153. Информлист Южноральского ЦНТИ. 197О. 2.Борисов В. И. Приборы активного онтроля. Обмен передовым опытом в авомобилестроении. - Экспресс-информация илиала НИИавтопром. 1975, № 3, с. 3-25, ис.2 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоклиновый самоустанавливающийся подшипник и способ его сборки | 1988 |
|
SU1624221A1 |
| ИЗМЕРИТЕЛЬНАЯ ГОЛОВКА | 1998 |
|
RU2140058C1 |
| Измерительная головка | 1990 |
|
SU1755035A1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ЭЛЕКТРОДАПО СТЫКУ | 1971 |
|
SU418296A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЗУБА | 1991 |
|
RU2008850C1 |
| Измерительная модульная головка | 1990 |
|
SU1768923A1 |
| Индуктивный преобразователь линейных размеров | 1986 |
|
SU1362916A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КОНТАКТОР | 1966 |
|
SU222483A1 |
| Сварочная головка для многопроходнойСВАРКи глубОКиХ РАздЕлОК | 1979 |
|
SU841838A1 |
| Устройство для правки фасонного шлифовального круга | 1980 |
|
SU952557A1 |