Изобретение относится к автоматике и может бьзть использовано при.управлении производственными и техно логическими процессами.j
Известно устройство для контроля параметров совокупности объектов, содержащее блок управления, счетчики, блоки сравнения и логические блоки, |0 позволйюЦее проводить анализ параметров объектов 1.
Недостатком такого устройства является сложность конструкции.
Наиболее близким техническим peme-|j нием к предлагаемому является устройство для контроля системы управления,.содержащее датчики, выходы которых соединены с одним входом первого коммутатора, другой вход 20 которого соединен с выходом первого блока управления, запоминающий блок, подключенный входом к выходу второго блока управления, алгебраический , сумматор, задающий блок и индикатор 25 12.
Недостатком такого устройства является низкая достоверность контроля.
Цель изобретения - повыиение достоверности результатов контроля. Q
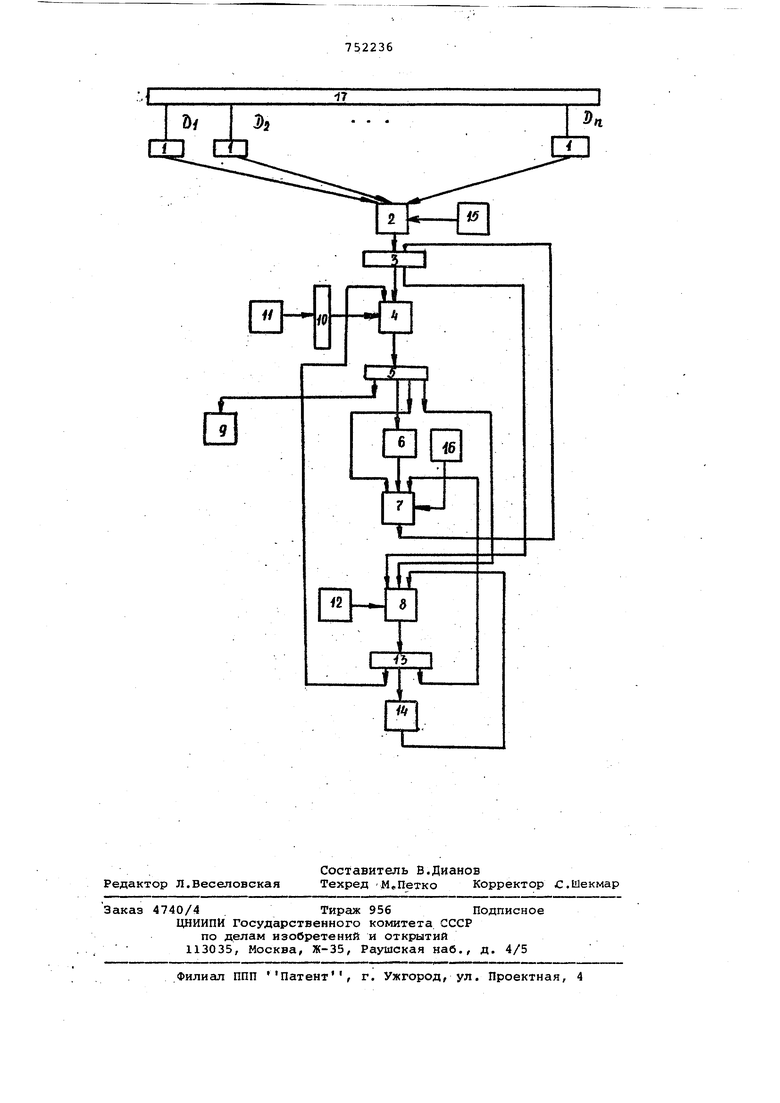
Поставленная цель достигается тем, что устройство содержит масштабный усилитель, блок функциональных уставок, сумматор, второй и третий коммутаторы, ключ и инвертор, вход которого соединен с выходом первого коммутатора через последовательно включенные второй .коммутатор, алгебраический сумматор, другой вход которого соединен с выходом задающего блока через ключ, и третий коммутатор, а выход инвертора соединен со вторым : входом запоминающего блока, третий вход которого подключен ко второму /выходу третьего коммутатора, подсоединенного третьим выходом ко входу индикатора, а четвертым выходом -г к первому входу масштабного усилителя, кЬ второму входу которого подключен второй выход второго коммутатора, соединенного вторым входом с выходом запоминающего- блока, третий вход масштабного усилителя подключен к выходу бло-ка функциональных уставок, а выход - ко входу четвертого коммутатора, первый выход которого соединен с третьим входом алгебраического сумматора, второй выход - с четвертым выходом запоминающего блока, а третий выход - со |входом сумматора, выход которого подключей к четвертому входу масштабного усилителя. На чертеже представлена блок-схема устройства. Схема содержит п-ое количество дат чиков 1 (DJ - Dq), первый 2 и второй 3 коммутаторы, алгебраический сумматор 4, третий коммутатор 5, инвертор б, запоминающий блок 7, масштабный 1 усилитель 8, индикатор 9, ключ 10, задающий блок 11, блок 12 функциондль ных уставок, четвертый коммутатор 13, сумматор 14, первый 15 и второй 16 блоки управления и объект 17 управ ления . Устройство работает следующим образом. Коммутатор 2 опрашивает датчики 1 тех однокоординатных величин объекта 17, которые используются для формирования обобщенного показателя работы объекта 17. При осуществлении опроса блоком 11 уставок значений выходных) величин одновременно формируются .напряжения, являющиеся уставками для соответствующих выходных величин Измеренное напряжение сравнивается в сумматоре 4 с уставкой, формируе-. мой блоком 11. При этом коммутатор 5 выполненный, например, в виде многопозиционного переключателя, нахо дится в таком положении, при котором его первый выход включен на вход инвертора б, который формирует всегда положительные напряжения. После окон чания опроса датчиков 1 коммутатор 5 занимает такое положение, при котором выход сумматора 4 подключен к блоку 7. При рассмотрении работы устройств исходят из того, что вышеуказанные операции выполнены несколько раз (например 6) с помощью блока 15. Таким образом, в блоке 7 хранятся сигналы iCi - Acf , дС2 - uCg, ..., uCj, - ЛС. С учетом этого остальная часть устройства работает следующим образом. Один из сигнсшов датчиков 1. (сигнал с датчика D), например дС„, где п - номер датчика, j - номер измерения, передается в сумматор 4 и сравнивается в. нем с каждым из остальных сигналов €„, где i - номера остальны изме1 ений, кроме j-го. Найденный, таким образом наименьший сигнгш ДС; за носиуся в блок 7 и одновременно сохраняется в сумматоре 4, Сигнал из блока 7, соответствующий последнему опросу из шести измерений данного да чика,, подается в сумматор 4, в котором он сравнивается с наименьшим сиг налом дс| , полученным также с. этого датчика. Полученная разность напряже ний подаётся в усилитель 8. При этом блок 12 этого усилителя 8 включен та ким образом, что усилитель 8 имеет коэффициент усиления К 1 и линейную характеристику. Ослабленный сигнал Л Sf, с выхода усилителя 8 заносится в блок 7. Точно так же устройство обрабатывает сигналы, снятые со всех остальных датчиков. При этом коммутатор 5 находится в положении, при котором выход сумматора 4 соединен со входом усилителя 8. Последние значения сигнала Cj, снятого с каждого датчика и оставшегося в блоке 7, подаются в усилитель 8. При этом коммутатор 3 находится в таком положении, при котором выход блока 7 соединен со входом усилителя 8. Одновременно блок 12 находится в таком положении, при котором усиление усилителя равно К 1, а сам усилитель 8 обладает линейной характеристикой. Сигнал с выхода усилителя 8 подается в блок 7 и сохраняется в нем. Аналогичным образом обрабатывается сигнал, снятый с каждого датчика и для каждого обрабатываемого сигнала блок 12 устанавливает свое значение усиления К 1. При этом коммутатор 13 находится в таком положении, при котором выход усилителя 8 соединен со входом блока 7. Сигналы iSf, сравниваются в сумматоре 4 друг с другом и переписываются в блок 7 таким образом, что они оказываются записанными по возрастанию величины сигнала uSf,. Одновременно для каждого из сигналов ASf, формируется сигн AN,, величина которого соответствует расположению сигнала лЗ в блоке 7. Сигналы ANj также заносятся в блок 7. При этом коммутаторы 3 и 5 находятся в таких состояниях, что сумматор 4 и блок 7 образуют замкнутый контур. Одновременно ключ 10 находится в таком состоянии, что блок 11 отключен от сумматора 4. Каждый из сигналов AN, подается в сумматор 4, где сравнивается с соответствующим сигналом. Разность сигналов подается в усилитель 8, усиливается и поступает в сумматор 14, в котором суммируется с результатом выполнения такой же операции над сигналами uSn-i и ANf,.|. Описанные операции выполняются по каждому датчику со всеми сигналами iS, лЫ„. Для выполнения вышеописанной операции коммутатор 3 находится в таком состоянии, что выход блока 7 соединен с выходом сумматора 4, коммутатор 5 .находится в таком состоянии, что выход сумматора 4 соединен со, входом . . усилителя 8, а коммутатор 13 - в та:ком, что выход усилителя 8 соединен со входом сумматора 14. Блоком 12 вырабатывается такая уставка, что усилитель 8 имеет нелинейную, в част ности квадраторную, характеристику усиления. Полученный суммарный сигнал подается в усилитель 8, затем поступае В cyNwaTOp 4 и в нем сравнивается с уставкой. Для выполнения этой операции блок 12 находится в таком состоянии, что усилитель 8 имеет линейную характеристику, а коммутатор 13 в таком, что выход усилителя 8 соединен со входом сумматора 4, блоком 11 вырабатывается при этом единичное напряжение, а посредством ключа 10 напряжение с выхода блока 11 подается в сумматор 4. Далее сигнал с выхода сумматора 4 через коммутатор 5 поступает на индикатор 9 в виде цифрового сигнала, iTo представляеа-; собой сформированный обобщенный показатель работы объекта 1 7 . Применение предлагаемого устройства обеспечивает использование однркоординатных показателей, описывающих работу системы управления, использова ние наперед заданного количества значений каждого показателя работы системы, предшествующих моменту формирования обобщенного показателя, принципиальную и техническую возможность увеличения наперед задаваемого количества показателей, представление обобщенного показателя как однокоорди натной величины, принци пи ал ьную и тех ническую возможность форгиирования величины показателя в пределах -1 - +1. Формула изобретения Устройство для контроля CHCTeNBJ уп равления, содержащее датчики, выходы которых соединены с одним входом первого коммутатора, другой вход которог соединен с выходом первого блока упра ления, запоминающий блок, подключенный входом к выходу второго блока управления, алгебраический сумматор, задающий блок и индикатор, о тл и-ч аю щ е е с я тем, ЧТО, с целью повышения достоверности результатов контроля, устройство содержит масштабный усилитель,блок функционгшьных уставок, cyNwaTop, второй и третий коммутаторы, ключ и инвертор, вход которого соединен с выходом первого коммутатора через последовательно включенные второй коммутатор, алгебраический сумматор, другой вход которого соединен с выходом задающего блока через ключ, и третий коммутатор, а выход инвертора соединен со вторым входом запоминающего блока, третий вход . которого подключен ко второму вы-ходу третьего коммутатора, подсоединенного третьим выходом ко входу индикатора, а четвертым выходом - к первому входу масштабного усилителя, ко второму входу которого подключен второй выход второго коммутатора, соединенного вторым входом с выходом запоминающего блока, третий вход масштабного усилителя подключен к выходу блока функционашьных уставок, а выход ко входу четвертого коммутатора, первый выход которого соединен с третьим входом алгебраического сумматора, второй выход - с четвертым выходом запоминающего блока, а третий выход - со входом сумматора, выход которого подключен к четвертому входу масштабного усилителя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 474812, кл. G 05 В 23/02, 1974. 2.Патент Великобритании № 1399356, кл. G 05 В 23/02, опублик. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод переменного тока | 1985 |
|
SU1292157A1 |
| Устройство управления буровым агрегатом | 1981 |
|
SU1086134A1 |
| Устройство противоаварийной автоматики электростации | 1976 |
|
SU656151A1 |
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
| Устройство измерения зенитного угла для телеметрической системы | 1982 |
|
SU1054538A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Фазометр | 1980 |
|
SU892344A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Электрогидравлическая следящая система стенда | 1985 |
|
SU1272820A1 |