(5) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
| Устройство для моделирования механической передачи | 1983 |
|
SU1180932A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU1001124A1 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1196912A2 |
| Устройство для моделирования механической передачи | 1979 |
|
SU864306A1 |
| Тренажер гусеничной машины | 2023 |
|
RU2820559C1 |
| Устройство для моделирования механической передачи | 1980 |
|
SU960862A2 |
1
Изобретение относится к аналоговой вычислительной технике и может быть использовано в тренажерах транспортных средств и исследовательских стендах.
По основному авт. св. № известно устройство для моделирования механической передачи, содержащее первый инвертор, выход которого соединен со входом усилителя, второй интегратор, выход которого через мостовой выпрямитель подключен ко входу второг го интегратора, коммутаторы, инвертор и ограничитель, вход к; торого соединен с выходом усилителя, а выход -со входом первого коммутатора, выходы которого подключены к группе входов второго интегратора,.выход которого соединен с первым входом первого интегратора, группа входов которого подключена к группе выходов второго коммутатора, вход которого является входом устройства, а выход второго коммутатора через инвертор соединен со .вторым входом первого интегратора С ijНедостатком этого устррйства является отсутствие возможности моделирования работы механической коробки передач при включении тормоза поворота и остановочного тормоза гусеничной машины.
Цель изобретения - повышение точности моделирования работы механичес10 .кой передачи за счет учета влияния остановочного тормоза и тормоза поворота.
Поставленная цель достигается тем,
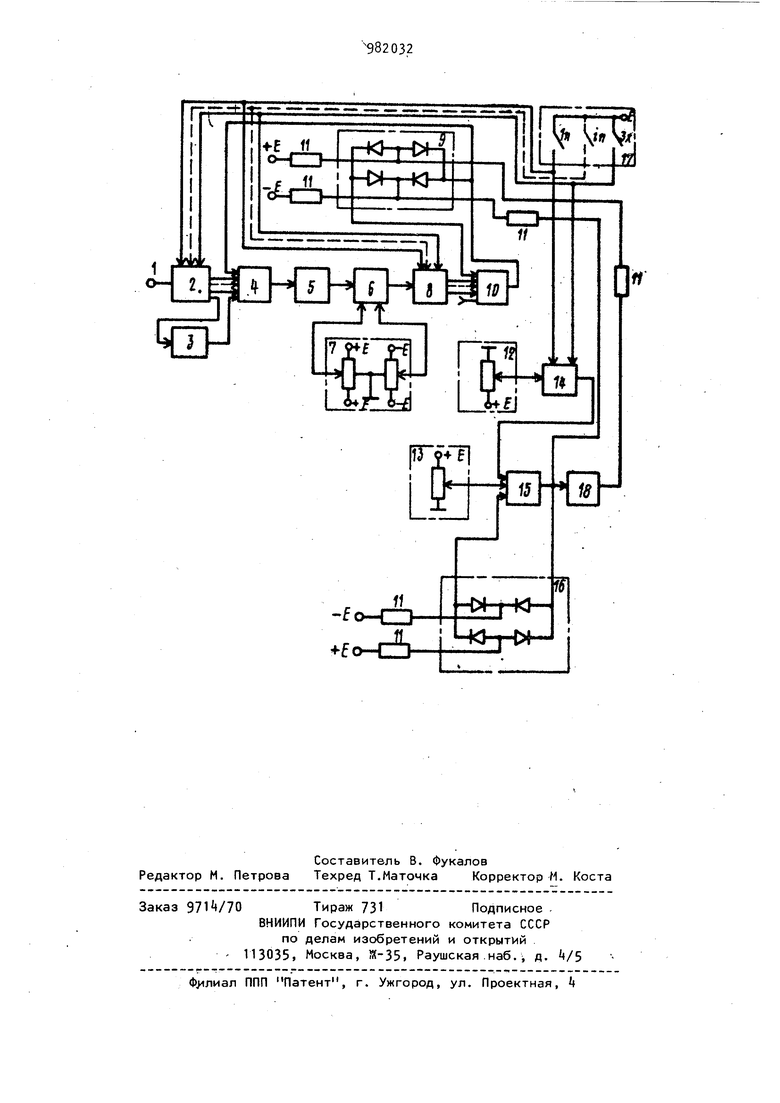
15 что устройство дополнительно содержит датчик переключения передач, датчик фрикциона, датчик остановочного тормоза, второй мостовой выпрямитель, ог раничительные резисторы и последова20тельно соединенные датчик тормоза поворота, третий коммутатор, сумматор и второй инвертор, причем выходы датчика переключения передач соединены соответственно с управляющими входами первого и второго коммутатора, уп равляющие входы третьего коммутатора подключены Соответственно к первому и последнему выходу датчика переключения передач, вход и выход второго инвертора через ограничительные рези торы соединены с другой парой вершин первого мостового выпрямителя, одна пара вершин второго мостового выпрямителя подключена соответственно к выходу и второму входу сумматора, а другая пара вершин второго мостового выпрямителя через ограничительные ре з11сторы соединена с источником разно полярного напряжения, выходы датчика фрикциона подключены соответственно к. управляющим входам ограничителя, а выход датчика остановочного тормоза соединен с третьим входом сумматора. На чертеже приведена функциональная схема устройства. Устройство, входом которого является вход 1 коммутатора 2, содержит инвертор 3, интегратор 4, усилитель 5, ограничитель 6, датчик 7 фрикциона, коммутатор 8, мостовой выпрямитель 9, интегратор 10, ограничительные резисторы 11, датчик 12 тормоза поворота, датчик 13 остановочного тор моза, коммутатор И, сумматор 15, мос товой выпрямитель 16,, датчик 17 пере ключения передач, инвертор 18. Устройство работает следующим образом. На вход коммутатор 2 подается напряжение, пропорциональное оборотам входного вала коробки передач l jjjgx Коммутатор 2 в зависимости от выбран ной в датчике17 передачи передает это напряжение на определенный вход интегратора , каждый вход которого соответствует передаточнрму числу ко робки передачи при включении соответ ствующей передачи. Управление коммутаторами 2, 8 и 14, а также выбор ин теграторов j и 10 осуществляется с помощью датчика 17 переключения пере дач. При включении первой передачи выключаются те коммутирующие элементы коммутаторов, которые электрически соединяют вход 1 с первым входом интегратора t, выход ограничителя 6 с первым входом интегратора 10 и выход датчика 12 тормоза поворота с пер вым вхрдом сумматора 15- Остальные цепи коммутаторов остаются разомкнутыми. Коммутатор подключает выход датчика 12 тормоза поворота к перво- му входу сумматора 15 только при включении первой передачи или передачи заднего хода. При включении второй передачи включаются другие коммутирующие элементы коммутаторов 2 и 8 и соединяют вторые входы интеграторов j и 10. То же происходит при включении любой другой передачи. При включении передачи заднего хода напряжение, пропорциональное оборотам входного вала коробки передач LLj,, поступает на соответствующий вход интегратора через инвертор 3, чем достигается изменение полярности напряжения, пропорционального оборотам выходного вала коробки передач 1 ЁЫХ Это напряжение снимается с выхода интегратора 10. На входе интегратора k напряжения иц, и и1урухскладываются, а на выходе интегратора k образуется напряжение, пропорциональное действующему крутящему моменту U.. При этом решается уравнение Uy2i .(j у ч . di шех uueMf. где С - упругость элементов коробки передач; - напряжение, пропорциональное крутящему моменту. Напряжение Уу через усилитель 5 поступает на ограничитель 6, который моделирует нелинейность типа сухое трение. Этот ограничитель ограничивает напряжение U.j. Уровень ограничения определяется управляющими напряжениями, пропорциональными максимальному моменту фрикциона, поступающими с датчика 7 фрикциона. Если напряжение и проходит через ограничитель с ограничением, то в этом случае моделируется буксование фрикционных элементов. Если это напряжение ограничено полностью, то моделируются полностью разомкнутые диски. В случае отсутствия ограничения моделируется передача момента без пробуксовки. Напряжение с выхода ограничителя поступает на вход коммутатора 8 с учетом коэффициента передачи i коробки передач. На свободный вход интегратора 10 подается напряжение, пропорциональное моменту сопротивления вращению и сМостовой выпрямитель 9 служит для предотвращения заряда интегратора при отсутствии напряжения U, т. е. служит для моделирования действия момента от сил сухого трения на выходном валу коробки передач. Кроме этого, через мостовой выпрямитель 9 в зависимости от полярности выходного напряжения интегратора 10, на его вход подается напряжение, пропорциональное
тормозному моменту и„..
«л
С помощью интегратора 10 решается
уравнение
, ... ... ..
dt где I - момент инерции вращающихся
масс коробки передач, приведенный к выходному валу .коробки передач. Напряжение U на мостовой выпрямитель подается с выхода сумматора 15 и инвертора 18. В сумматоре складываются напряжения Ujyj , пропорциональное тормозному моменту от тормоза поворота, и 1,мЗ, пропорциональное тормозному моменту от остановочного тормоза. Напряжение и поступает на коммутатор 1 с датчика 12. Коммутатор И передает это напряжение на вход сумматора 15 только при поступлении на его управляющий вход сигналов, соответствующих включению первой передачи или передачи заднего хода в датчике 17.
Мостовой выпрямитель 16, включеннь1й в обратную связь сумматора 15, слу жйт для создания зоны нечувствительности, чем моделируется наличие механического люфта у привода тормоза.
Таким образом, устройство для мо делирования механической передачи воспроизводит работу коробки передач при включении остаМЬвочного тормоза и тормоза поворота, чем повышается точность моделирования.
Формула изобретения Устройство для моделирования механической передачи по авт. св. Н86 30б, отличающееся тем, что, с целью повышения точности моделирования за счет учета влияния остановочного тормоэа и тормоза поворота, оно дополнительно содержит датчик переключения передач, датчик фрикциона, датчик остановочного тормоза, второй мостовой выпрямитель, ограничительные резисторы и последовательно соединенные датчик тормоза поворота, третий коммутатор, сумматор и второй инвертор, причем выходы датчика переключения передач соединены соответственйо с управляющими входами первого и второго коммутатора, управляющие входы , третьего коммутатора подк/ж чены соот-/ ветственно к первому ипоследнему вн ходу датчика переключения передач, вход и выход второго инвертора через ограничительные резисторы соединены с другой парой 1вершин первого мостового выпрямителя, одна пара вершин второго мостового выпрямителя подключена соответственно к выходу и второму входу сумматора, а другая пара верин второго мостового выпрямителя через ограничительные резисторы соединена с источником разнополярного нап- ряжения, выходы датчика фрикциона подключены соответственно к улравляющим входам ограничителя, а выход датчика становочного тормоза соединен с третьим входом сумматора.
Источники информации, ринятые во внимание при экспертизе
