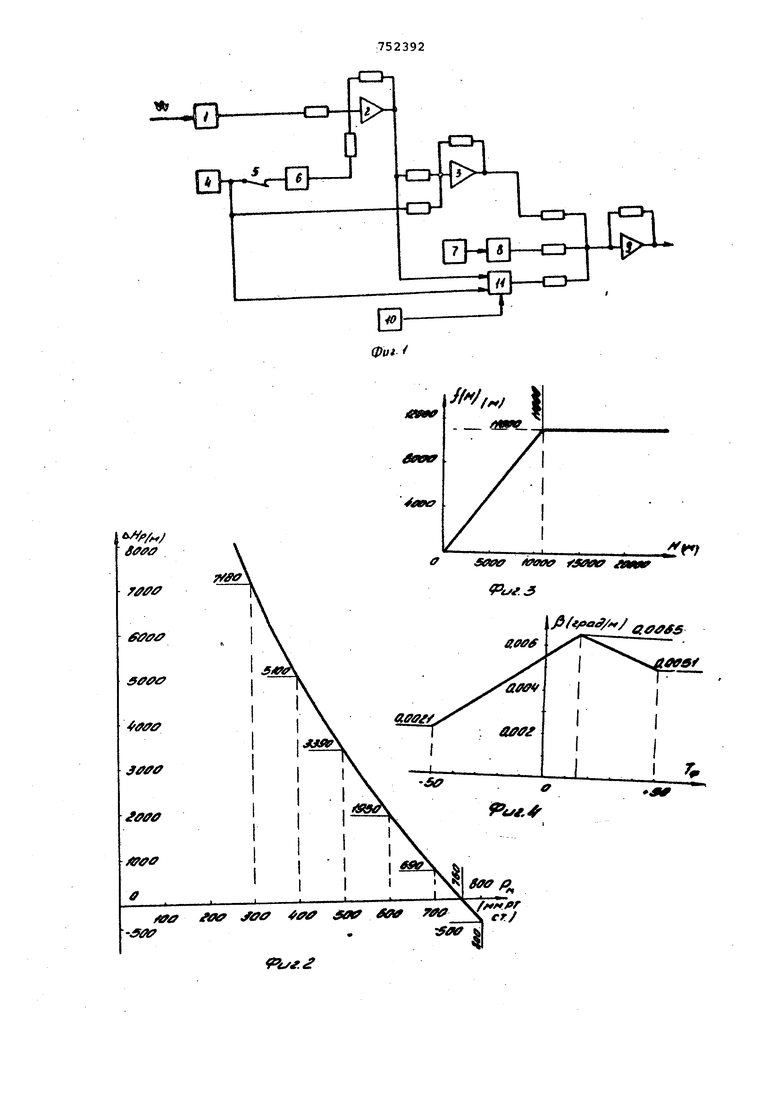
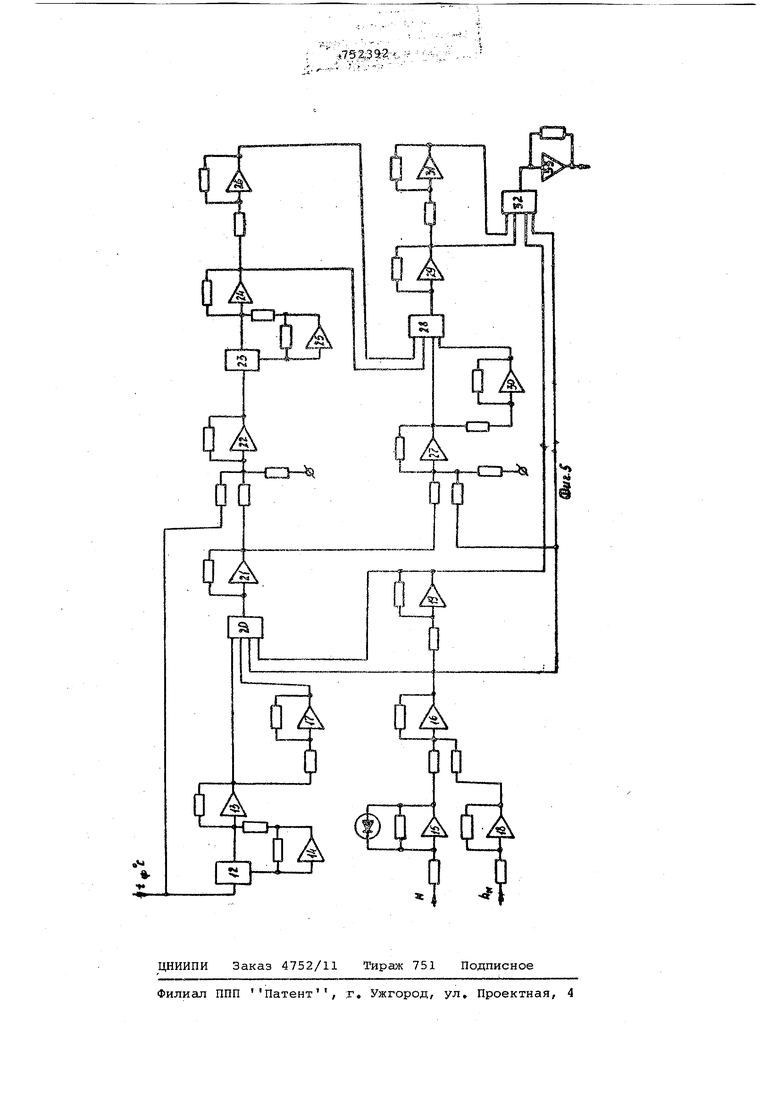
таким образом в известном устрой стве не решаются текущие значения п правок к барометрической высоте, что приводит к ошибке в решении и, соответственно, приборной индикации .барометрической высоты в кабине лет 1ика. Это приводит в свою очередь/ к привитию ложных навыков при обучении летчика на тренажере. Цель изобретения - повышение точности моделирования. Поставленная цель достигается тем, что в устройство для моделирования высоты полета, дополнительно введены последовательно соединен ные датчик атмосферного давления и блок вычисления поправки на изменение атмосферного давления, датчик наружной температуры, блок вычисления поправки на изменение наружной температуры и третий суммирующий усилитель, первый вход которого подключен к выходу второго усилителя, второй вход соединен с выходом блока вычисления поправки на изменение атмосферного давления, а третий вход подключен к выходу блока поправки на изменение наружной температуры, три входа которого соедин ны соответственно с выходами первог суммирующего усилителя, датчика текущего уровня местности и датчика наружной температуры. На фиг. 1 представлена блок-схем устройства.для моделирования бароме рической высоты полета; на фиг. 2 кривая поправки барометрической высоты от атмосферного давления; на фиг. 3 - график ограниченной высоты на фиг. 4 - изменение поправочного коэффициента от окружающей температуры; на фиг. 5 - схема блока вычис ления поправки на изменение наружно температуры. Устройство для моделирования бар метрической высоты полети содержит интегратор 1 высоты, первый суммиру щий усилитель 2, второй суммирующий усилитель 3, датчик 4 текущего (про летаемого) уровня местности,ключ 5, блок б памяти, датчик 7 атмосферного давления на пролетаемом уровне местности, блок 8 вычисления поправ ки на изменение атмосферного давлен третий суммирующий усилитель 9, дат чик 10 наружной температуры на прол таемом уровне местности, блок 11 вычисления поправки на изменение аружной температуры. В основу работы устройства для моделирования барометрической высот полета положено уравнение Б ист Р . Н«ст +АНр Текущее значение истинной высоты полета описывается уравнением - h.. . (2) ист t- отн уровень аэродрома взлётаJ , J vydt -.текущее значение относительной высоты полета (высота относительно аэродрома взлета); h - Зсщаваемое значение пролетаемого уровня местности. екущее значение поправки дН, сляется как А Нр f (P(v) , Р,- задаваемое значение атмосферного давления на пролетаемом уровне местности. ункциональная зависимость f(P) ставлена на фиг. 2. екущее значение поправки л Н-г выяется по уравнению -LP.P н Н Н„ Тф.ср текущее значение ограниченной истинной высоты полета Трр - расчетное значение средней температуры столба воздуха высотой Н(.,.о. граниченная истинная высота вычисся по уравнению f(H) - h ист.оср И - «0 + f(H) - представлена на фиг.З. асчетная средняя температура ба воздуха высотой Н, вычисся по формуле Т ТртЬ ТМ.Р Р-ср 2 TO 288 К; Тцр TO - (5о , Т„р- расчетная температура воздуха на высо0,0065 град/м - температурный градиент для стандартной атмосферы. актическая средняя температура ба воздуха высотой Н„. вычисся по формуле ТУ+ Тнф/g) J-p.cpr 2 Тф - задаваемая фактическая температура воздуха на пролетаемом уровне местности (К); Turn фактическая температура возвысоте Н., духа на .c емпература Т„ф вычисляется по вню исгогр , ар- Яр В f(Тф) - температурный градиент, зависящий от фактической температуры на уровне местности. ункциональная зависимость f(Tqj), ставлена на фиг. 4. одставив выражения (5) и (6) ражение (3) и приведя его к , удобному для моделирования, полууравнениё поправки /2То-(ЬоНцст.огр 2Тф+|ЗНцст.огр ист.огр 2Тф-рНиет.огр Устройство для моделирования баро метрической высоты полета (фиг. 1) работает следующим образом. Перед началом работы устройства н датчиках 4, 7 и 10 устанавливаются соответственно уровень местности, величина атмосферного давления и температура наружного воздуха на аэродроме взлета. По сигналу Началь ные условия напряжение, пропорциональное уровню местности аэродрома взлета с датчика 4 через ключ 5 поступает в блок б памяти. После введения начальных условий на вход интегратора 1 высоты подается напряжение , пропорциональное вертикальной скорости V. На выходе интегратора 1 появляется напряжение, пропорциональ ное относительной высоте полета Н На суммирующем усилителе 2 моделируется уравнение Н Нотм , для чего на первый вход этого усилителя подается напряжение с интегратора 1 высоты, а на второй вход подается напряжение с блока б памяти. На выхо де суммирующего усилителя 2 снимается напряжение, пропорциональное текущей барометрической высоте полета Н, но без учета изменений атмосферного давления и температуры наружног воздуха на пролетаемом уровне местности. На суммирующем усилителе 3 модели руется первое слагаемое уравнение (1), для чего на первый вход этого усилителя подается напряжение с суммирующего усилителя 2, а на второй вход подается напряжение с датчика 4 уровня местности, пропорциональное установленному значению уровня местности Ьд (в общем случае отличное от уровня местности аэродрома взлета). С выхода сммирующего усилителя 3 снимается напряжение, пропорциональное текущему значению истинной высоты полета (высота относительно проле таемого уровня местности) . Второе слагаемое уравнения (1) моделируется в блоке 8 вычисления поправки на изменение атмосферного давления ( дНр). Для вычисления это поправки с датчика 7 снимается напря жение, пропорциональное установленному значению атмосферного давления Рд на уровне местности (в общем случ отличное от значения атмосферного давления на аэродроме взлета), и подается на вход блока 8. Поправка д Н в блоке 8 вычисляется путем воспроиз ведения функциональной зависимости лНр f (Рду) .Моделирование функции f(PiJ может быть реализовано, например, с помощью активного диодного . функционального преобразователя, изображенного на фиг.5, состоящего из блока 12 нелинейности и операцио ных усилителей 13 и 14. Третье слагаемое уравнения (1) моделируется в блоке 11 вычисления поправки, учитывающей изменение температуры наружного воздуха (лн). 8основу вычисления поправки положено уравнение (7). Для вычисления поправки дН-г на первый вход блока 11 подается с. выхода суммирующего усилителя 2 напряжение, пропорциональное текущей высоте Н, на второй вход блока 11 подается с выхода датчика 4 напряжение,пропорциональное установленному значению уровня местности h, и на третий вход блока 11 подается с выхода датчика 10 напряжение, пропорциональное установленному значению температуры наружного воздуха Тф на уровне местности (в общем случае отличное от значения температуры наружного воздуха на аэродроме взлета). Суммирование слагаемых Нц(. ,лНр uHj уравнения (1) осуществляется на суммирующем усилителе 9 (фиг, 1). На первый вход суммирук1щего усилителя 9с выхода суммирующего усилителя 3 подается напряжение пропорциональное текущему значению истинной высоты полета AHj,,. На второй выход суммирующего усилителя 9 с выхода блока 8 вычисленияпоправки подается напряжение, пропорциональное вычисленному текущему значению поправки лНр . На третий вход суммирующего усилителя 9 с выхода блока 11 вычисления поправки дНу подается напряжение, пропорциональное вычисленному текущему значению поправки ДН. С выхода су1 1мируюшего усилителя 9 снимается напряжение, пропорциональное сумме слагаемых (- дНр + дН , т.е. пропорциональное текущей барометрический высоте полета с учетом изменения атмосферного давления и температуры наружного воздуха на пролетаемом уровне местности. Модель уравнения (7) может быть реализована с помощью схемы, изображенной на фиг. 5. На этой схеме функциональная зависимость В f(Tq,) моделируется с помощью активного диодного функционального преобразователя, состоящего из блока 12 нелинейности и операционных усилителей 13 и 14. Функционсшьная зависимость f(H) моделируется на операционном усилителе 15 с помощью стабилитрона, включенного в цепь обратной связи этого усилителя. Уравнение f(H) - h моделируется на операционном суммирующем усилителе 16. Операционные усилители 17, 18, 19 выполняют функцию инверторов .Произведение ЗН,моделируется с помощью множительного устройства на диодных квсщраторах. состоящего из блока 20 перемножения и операционного усилителя 21. Выражение 2 Т р-ВНщт.,гр моделируется на операцион ном усилителе i2.. Вычислейие величи ны обратной выражению 2Тф- 8 Нисг.огр. осуществляется путем решения функци нальной зависимости ,,,.o,p). i ф .обр Моделирование функции f{2T(p- производится с помощью активного дио ного функционального преобразователя состоящего из блока 2,3 нелинейности и операционных усилителей 24 и 25, Операционный усилитель 26 выполняет функцию инвертора. Выражение 2То- ВоНцст.огр.-ZT +RH моделируется на операционном усилителе 27. Произведение ((.огр 21 ф |2Нист-.огр)т рн Ф .о моделируется с помощью множительного устройства на диодных квардаторах, состоя ;;его из блока 28 перемножения и операционного усилит ля 29. Операционные усилители 30 и 31 выполняют функцию инверторов. Произведение ,Нист.огр2Тф-рНцст.огр ист..Нист.огр/ моделируется с помощью множительног устройства на диодных квадраторах, состоящего из блока 32 перемножения И операционного усилителя 33. Таким образом на выходе операционного усилителя 33 получаем напряжение, пропорциональноевычисленному текущему значению поправки дН-. Предлагаемое устройство для моделирования барометрической высоты полета позволяет моделировать барометрическую высоту полета с учетом изменения атмосферного давления и температуры наружного воздуха на пр летаемом уровне местности и приблизить индицируемые барометрическим прибором в кабине летчика значение этой высоты к реальным. Формула изобретения Устройство для моделирования барометрической высоты полета, содержащее интегратор, вход которого является входом устройства, а выход подключен к первому входу первого суммирующего усилителя, второй вход которого подключен к выходу блока памяти, вход которого соединен через ключ с выходом датчика текущего уровня местности, подключенным к первому входу второго суммирующего усилителя, второй вход которого соединен с выходом первого суммирующего усилителя, отличающееся тем, что, с целью повышения точности моделирования, в устройство дополнительно введены последовательно соединенные датчик атмосферного давления и блок вычисления поправки на изменение атмосферного давления, датчик наружной температуры, блок вычисления поправки на изменение наружной.температуры, и третий суммирующий усилитель,первый вход которого подключен к выходу второго усилителя,второй вход соединен с выходом блока вычисления поправки на изменение атмосферного давления, а третий вход подключен к выходу блока поправки на изменение наружной температуры, три входа которого соединены соответственно с выходами первого суммирующего усилителя, датчика текущего уровня местности и датчика наружной температуры. Источники информации, принятые во внимание при экспертизе 1.Патент США 3448201,кл. 35-10, 1969. 2.Авторское свидетельство СССР № 563859, кл. G Об G 7/78, 1975.
1вУв
Sffffff ЛВГ . ЛЯ Л1
У.г .&«%7 19I ft«l7 tJf.3 ЛЛf /ffff.f cr/
