Изобретение относится к специализированным вычислительным средствам и может быть использовано в авиационных тренажерах (АТ) и исследовательских стендах.
Барометрическая высота полета является одной из основных характеристик, по которым в сознании оператора формируется информационная модель полета. Основным требованием к моделируемой барометрической высоте является то, чтобы информация на АТ, поступающая оператору об этой высоте по зрительному каналу, была подобна той, которую оператор получает на реальном летательном аппарате (ЛА). Это подобие, в свою очередь, на АТ позволяет прививать оператору правильные навыки пилотирования.
Известно устройство для моделирования высоты полета [1] содержащее набор датчиков параметров окружающей среды и вычислительные блоки. В процессе имитации полета в данном устройстве моделируются геометрическая (абсолютная) высота полета (высота относительно уровня моря), истинная высота (радиовысота) полета (высота относительно пролетаемого (текущего) уровня местности) и барометрическая (относительная) высота полета (высота относительно уровня местности, для которого известна величина атмосферного давления у земли). В этом устройстве барометрическая высота полета моделируется без учета распределения атмосферного давления воздуха от силы тяготения. В реальных условиях параметры атмосферы (давление, плотность) зависят от ускорения свободного падения и вызывают изменение показаний барометрической высоты, индицируемой барометрическим указателем высоты в кабине ЛА. Отсюда следует, что неточное моделирование барометрической высоты полета отрицательно сказывается на формировании навыков пилотирования в процессе обучения операторов на АТ.
Наиболее близким по технической сущности к заявляемому устройству является устройство для моделирования барометрической высоты полета [2] Оно содержит интегратор высоты, блок памяти, ключ, три сумматора, датчик текущего уровня местности, датчики атмосферного давления и температуры воздуха (наружной температуры) на текущем уровне местности и блоки вычисления поправок на изменение атмосферного давления и наружной температуры.
В процессе имитации полета в устройство из вычислителя имитатора динамики полета поступает сигнал, пропорциональный вертикальной скорости полета, а с датчиков поступают сигналы, пропорциональные параметрам окружающей среды. По этим сигналам в устройстве решаются уравнения абсолютной, истинной и барометрической высоты полета:
Hабс hмо + Нотн;
Нист Набс hм;
Нб Нист + ΔНр + ΔНт, где Набс абсолютная (геометрическая) высота полета;
Нист истинная высота полета;
Hотн= ∫vydt относительная высота полета;
Нб барометрическая высота полета;
Vу вертикальная скорость полета;
hмо задаваемое значение уровня аэродрома взлета;
hм задаваемое значение пролетаемого (текущего) уровня местности;
ΔНр f(P0) поправка, учитывающая изменение атмосферного давления;
ΔНт поправка, учитывающая изменение температуры наружного воздуха;
Р0 задаваемое значение атмосферного давления у земли.
Таким образом, на выходе данного устройства вырабатывается напряжение, пропорциональное барометрической высоте полета с учетом методических погрешностей барометрического высотомера. Это напряжение поступает в имитатор барометрического высотомера в кабине АТ, представляющей собой прибор со встроенной следящей системой, которая преобразует входное напряжение в угол поворота стрелки этого прибора.
Из приведенных уравнений видно, что моделируемая в устройстве барометрическая высота полета не учитывает потенциал силы тяжести, т.е. не является геопотенциальной высотой.
В реальных условиях статическое давление воздуха на высоте полета зависит не только от геометрической высоты, давления у земли и температуры воздуха, но и от ускорения свободного падения и, следовательно, реальный барометрический высотомер, измеряющий это давление, индицирует геопотенциальную высоту, однозначно характеризующую потенциальную энергию силы тяжести.
Рост интенсивности воздушного движения вызывает сокращение интервалов вертикального эшелонирования и требует от экипажей ЛА тщательного выдерживания заданной геопотенциальной высоты полета по барометрическому высотомеру. Это повышает безопасность полетов.
Таким образом, прототип не позволяет моделировать барометрическую геопотенциальную высоту полета. Это приводит к тому, что имитируемые в устройстве значения барометрической высоты не совпадают со значениями высоты, наблюдаемыми оператором в аналогичных условиях в реальном полете. Это, в свою очередь, приводит к тому, что оператору в процессе обучения на АТ прививаются ложные навыки по выдерживанию заданной высоты полета. Указанный недостаток снижает эффективность обучения операторов на АТ.
Цель изобретения расширение функциональных возможностей устройства за счет моделирования геопотенциальной барометрической высоты полета.
Цель достигается тем, что в устройство для моделирования барометрической высоты полета введен блок вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения, выход которого соединен с четвертым входом третьего сумматора, а вход с выходом первого сумматора.
Во введенном блоке моделируется поправка ΔНд к барометрической высоте полета по выражению
ΔHд где h геометрическая высота полета;
где h геометрическая высота полета;
r условный радиус земли.
Реализация этой поправки обеспечивает моделирование геопотенциальной барометрической высоты полета, что является существенным отличием от известного устройства.
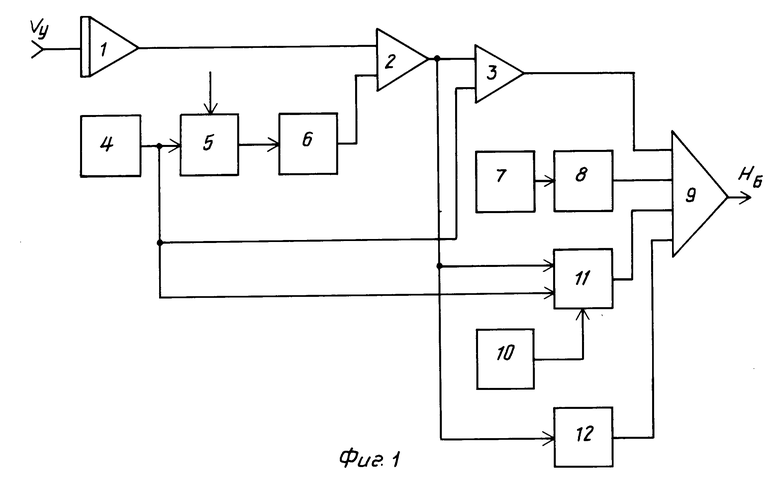
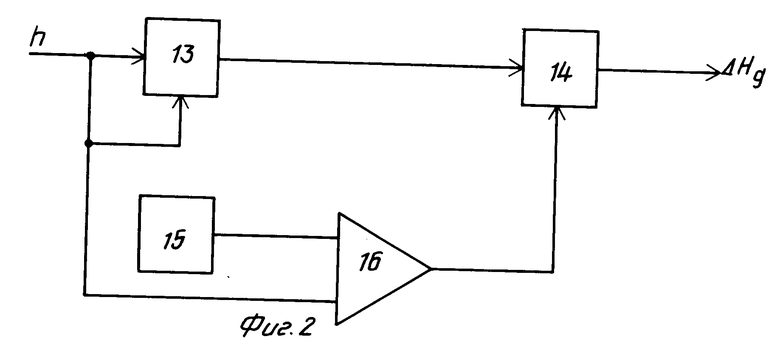
На фиг.1 представлена схема устройства для моделирования барометрической высоты полета; на фиг.2 схема блока вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения.
Устройство для моделирования барометрической высоты полета содержит интегратор 1 высоты, первый сумматор 2, второй сумматор 3, датчик 4 текущего уровня местности, ключ 5, блок 6 памяти, датчик 7 атмосферного давления на текущем уровне местности, блок 8 вычисления поправки на изменение атмосферного давления, третий сумматор 9, датчик 10 наружной температуры на текущем уровне местности, блок 11 вычисления поправки на изменение наружной температуры и блок 12 вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения. Блок 12 включает перемножитель 13, узел 14 деления, источник 15 опорного напряжения, сумматор 16.
В основу работы устройства положено уравнение
Нб Нист + ΔНр + Δ Нт ΔНд, (1) где Нб текущее значение барометрической высоты полета;
Нист текущее значение истинной высоты полета;
ΔНр текущее значение поправки, учитывающее изменение атмосферного давления на текущем уровне местности;
ΔНт текущее значение поправки, учитывающее изменение температуры наружного воздуха на текущем уровне местности;
ΔНд текущее значение поправки, учитывающее изменение распределения атмосферного давления воздуха от силы тяготения.
Текущее значение истинной высоты полета описывается уравнением
Нист h hм, (2) где h hмо + Hотн текущее значение геометрической высоты полета (высота относительно уровня моря);
hмо уровень аэродрома взлета;
Нотн ∫ Vydt текущее значение относительной высоты полета (высота относительно аэродрома взлета);
hм задаваемое значение текущего уровня местности;
Vy вертикальная скорость полета.
Текущее значение поправки ΔНр вычисляется как ΔНр f(Pм), где Рм задаваемое значение атмосферного давления на текущем уровне местности.
Текущее значение поправки ΔНт вычисляется по уравнению
ΔHт= [f(h)-hм] 1
1
(3) где Т0 288 К;
βo 0,0065 град/м температурный градиент для стандартной атмосферы;
Тф задаваемая фактическая температура воздуха на текущем уровне местности (К).
Текущее значение поправки ΔНд вычисляется как
ΔHд=  (4)
(4)
Устройство для моделирования барометрической высоты полета (фиг.1) работает следующим образом.
Перед началом работы устройства на датчиках 4, 7 и 10 устанавливаются соответственно уровень местности, величина атмосферного давления и температура воздуха на аэродроме взлета. По сигналу "Начальные условия" напряжение, пропорциональное уровню местности аэродрома взлета hмо, с датчика 4 через ключ 5 поступает в блок 6 памяти. После введения начальных условий на вход интегратора 1 высоты из имитатора динамики полета подается напряжение, пропорциональное вертикальной скорости полета Vy. На выходе интегратора 1 появляется напряжение, пропорциональное относительной высоте полета Нотн.
На первом сумматоре 2 моделируется уравнение h hмo + Hотн, для чего на первый вход этого сумматора подается напряжение с интегратора 1 высоты, а на второй вход напряжение с выхода блока 6 памяти. На выходе первого сумматора 2 снимается напряжение, пропорциональное геометрической высоте полета h.
На втором сумматоре 3 моделируется первое слагаемое уравнения (1), для чего на первый вход этого сумматора напряжение с первого сумматора 2, а на второй вход напряжение с датчика 4 уровня местности, пропорциональное заданному текущему уровню местности hм. С выхода второго сумматора 3 снимается напряжение, пропорциональное текущему значению истинной высоты полета Нист.
Второе слагаемое уравнения (1) моделируется в блоке 8 вычисления поправки на изменение атмосферного давления ( ΔНр). Для вычисления этой поправки с датчика 7 снимается напряжение, пропорциональное заданному значению атмосферного давления Рм на текущем уровне местности, и подается на вход блока 8. Поправка ΔНр в блоке 8 вычисляется путем воспроизведения функциональной зависимости ΔНрf(Pм). Реализация вычисления поправки ΔНр в блоке 8 аналогична вычислению в устройстве-прототипе.
Третье слагаемое уравнения (1) моделируется в блоке 11 вычисления поправки на изменение наружной температуры ( ΔНт). В основу вычисления этой поправки положено уравнение (3). Для вычисления поправки ΔНт на первый вход блока 11 с выхода первого сумматора 2 подается напряжение, пропорциональное геометрической высоте полета h, на второй вход блока 11 с выхода датчика 4 подается напряжение, пропорциональное заданному значению текущего уровня местности hм. На третий вход блока 11 с выхода датчика 10 подается напряжение, пропорциональное заданному значению температуры наружного воздуха Тф на текущем уровне местности. Реализация вычисления поправки ΔНт в блоке 11 аналогична вычислению в устройстве-прототипе.
Четвертое слагаемое уравнения (1) моделируется в блоке 12 вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения ( ΔНд). В основу вычисления этой поправки положено выражение (4). Для вычисления поправки ΔНд на вход блока 12 с выхода первого сумматора 2 подается напряжение, пропорциональное геометрической высоте полета h.
Суммирование слагаемых Нист, Δ Нр, ΔНт, ΔНд уравнения (1) осуществляется на третьем сумматоре 9. На первый вход этого сумматора с выхода второго сумматора 3 подается напряжение, пропорциональное текущему значению истинной высоты полета Нист. На второй вход сумматора 9 с выхода блока 8 вычисления поправки на изменение атмосферного давления подается напряжение, пропорциональное текущему значению поправки ΔНр. На третий вход сумматора 9 с выхода блока 11 вычисления поправки на изменение наружной температуры подается напряжение, пропорциональное текущему значению поправки ΔНт. На четвертый вход сумматора 9 с выхода блока 12 вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения подается напряжение, пропорциональное текущему значению поправки ΔНд.
С выхода третьего сумматора 9 снимается напряжение, пропорциональное алгебраической сумме слагаемых Нист + ΔНр + +Δ Нт ΔНд, т.е. пропорциональное текущей геопотенциальной барометрической высоте.
Поправка ΔНд реализуется в блоке 12 (фиг.2) по выражению (4). При этом произведение h .h моделируется на перемножителе 13, для чего на первый и второй входы этого перемножителя поступает напряжение, пропорциональное параметру h. Выражение r + h моделируется на сумматоре 16, для чего на первый вход этого сумматора с выхода источника 15 опорного напряжения подается напряжение, пропорциональное параметру z, а на второй вход сумматора 16 поступает напряжение, пропорциональное параметру h.
Операция деления реализуется на узле 14 деления, для чего на первый вход этой схемы с выхода перемножителя 13 подается напряжение, пропорциональное делимому, а на второй вход узла 14 с выхода сумматора 16 поступает напряжение, пропорциональное делителю. На выходе узла 14 снимается напряжение, пропорциональное выражению  , т.е. пропорциональное текущему значению поправки ΔНд.
, т.е. пропорциональное текущему значению поправки ΔНд.
Таким образом, введение в устройство для моделирования барометрической высоты полета блока вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения и подсоединение его согласно приведенной схеме по сравнению с прототипом за счет имитации во введенном блоке зависимости статического атмосферного давления воздуха от ускорения свободного падения и учета этой зависимости с помощью специальной поправки в показаниях регистратора высоты позволяют при имитации горизонтального полета на заданной высоте (при имитации вертикального эшелонирования) повысить точность моделирования барометрической высоты полета (т.е. позволяет моделировать геопотенциальную барометрическую высоту) и тем самым приблизить показания указателя барометрической высоты в кабине АТ к тем, какие оператор наблюдает в реальном полете, что, в свою очередь, позволяет повысить качество обучения операторов на АТ.
Изобретение относится к специализированным вычислительным средствам и может быть использовано в авиационных тренажерах. Устройство содержит интегратор высоты, датчики уровня местности, атмосферного давления и температуры воздуха, блок памяти, ключ, три сумматора, блоки вычисления поправок на изменение атмосферного давления и температуры воздуха и блок вычисления поправки на изменение распределения атмосферного давления воздуха от силы тяготения. По сигналам с датчиков и по значению вертикальной скорости, поступающей из вычислителя тренажера, в устройстве решается уравнение геопотенциальной барометрической высоты полета. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для моделирования барометрической высоты полета | 1977 |
|
SU752392A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
