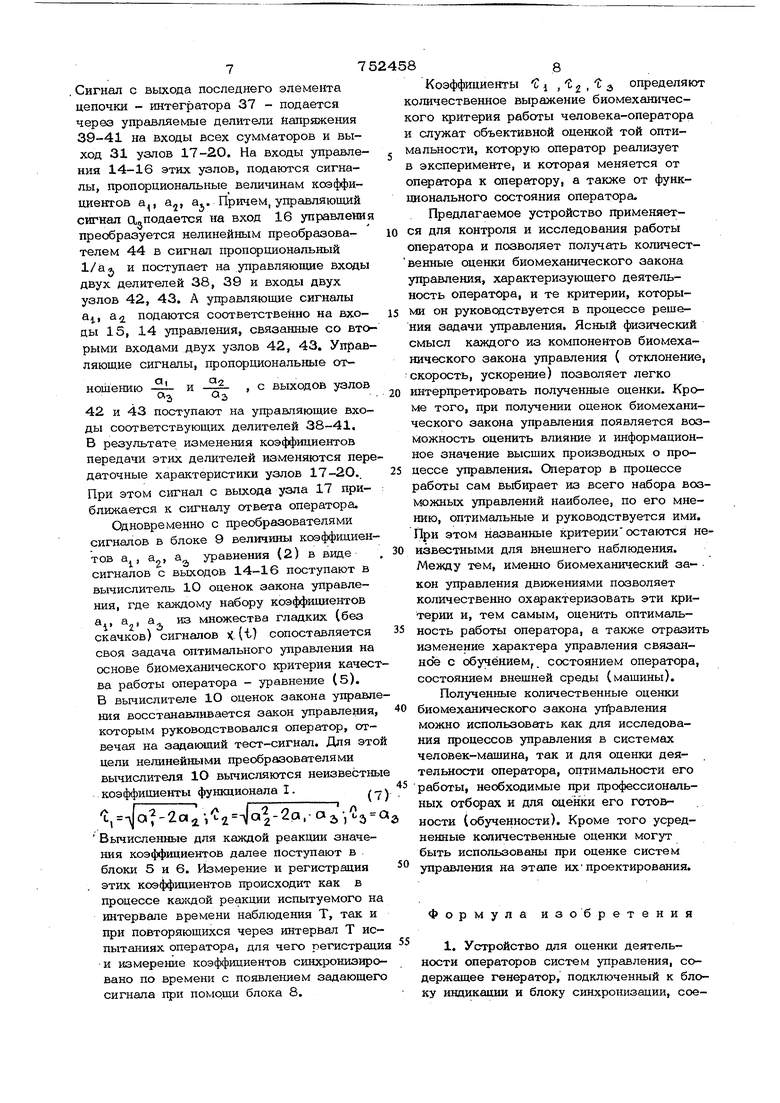
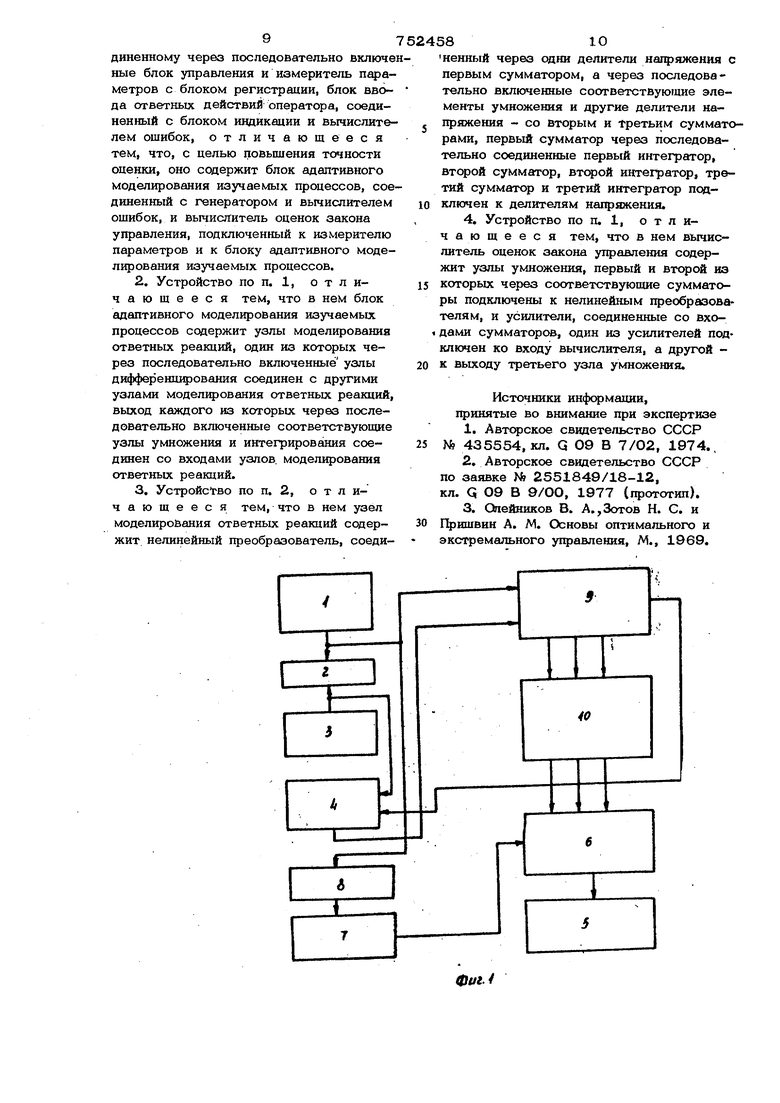
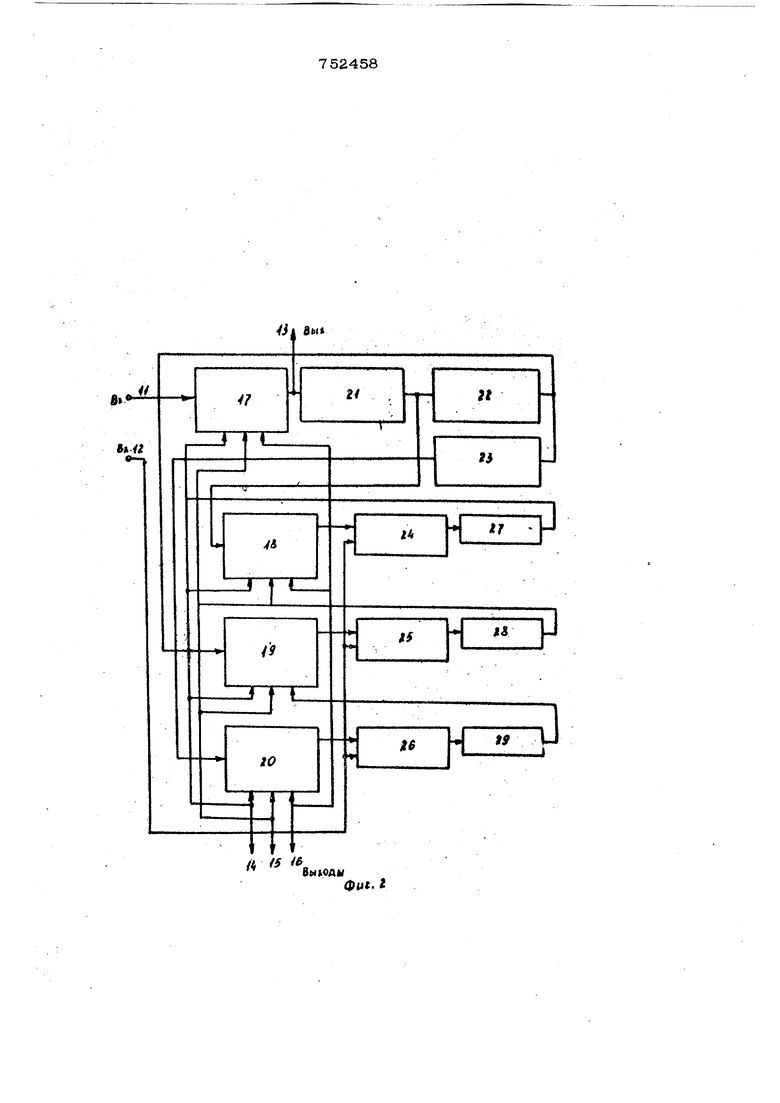
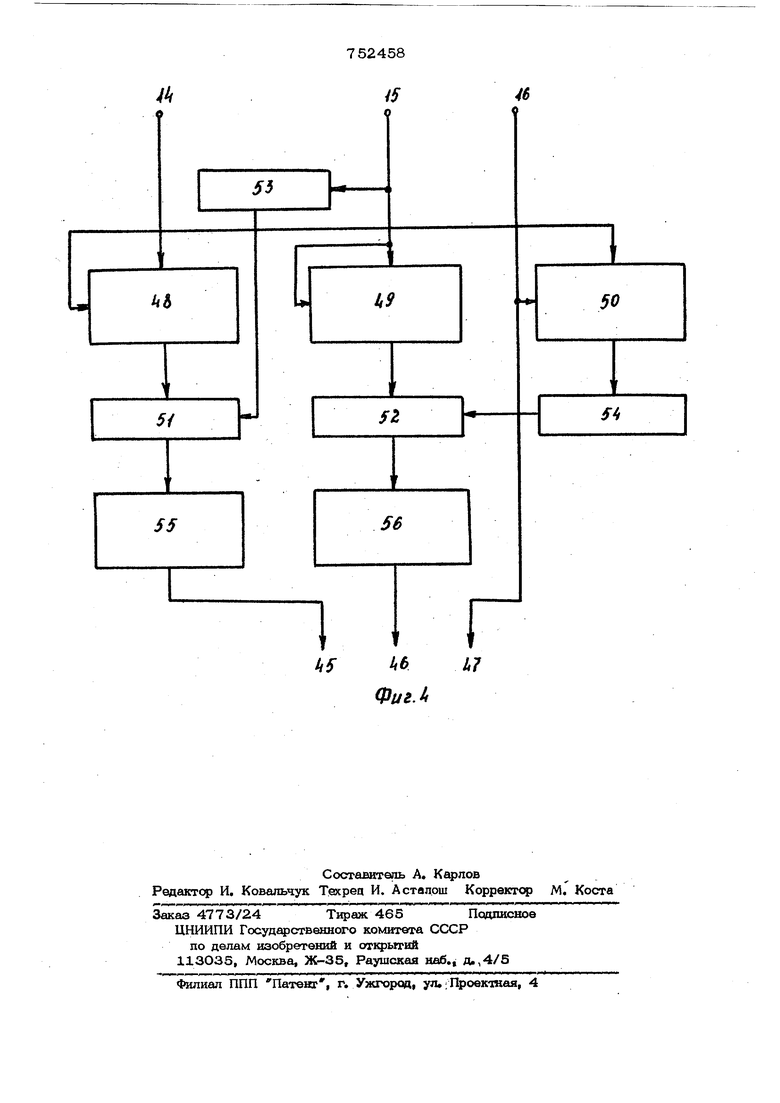
Изобретение относится к автоматике и вычислительной технике, в частности к тренажерам, предназначенным для обучения, профессионального отбора и исследования деятельности операторов. Известны устройства для оценки деятельности операторов систем управления, в которых контроль деятельности оператора осуществляется путем математического представления его входных-выход-, ных характеристик в виде передаточных функций. При этом особенность работы от дельнся о оператора отражается на форме передаточных функций 1 Наиболее близким техническим решением к изобретению является устройство для оценки деятельности операторов систем управления, содержащее генератор задаваемых функций, соединенный последоваггельно с индикатором и датчиком испытуемого, схему вычисления ошибки, вход которой соединен с датчиком испытуемого, а выход через коммутатор с интеграторами, выходы которых соединены через измерительное устройство с регистрирующим устройством, схему управления, соединенную через синхронизатор с генератором задаваемых функций. Каждый из двух входов коммутатора соединен с двумя интеграторами. Опии выход схемы управления соединён с коммутатором, другой - с утфавляющим входом измерительного устройства, и два выхода соединены с управляющими входами интеграторов, причем каждый И9 них соединен с двумя интеграторами, связаннь(ми с одним из выходов коммутатора ЗД. Данное устройство позволяет, оценивать точность вьшолнения к 1ждого движения оператора в соответствии с фазами задающего сигнала. Оанако такое устройство не позволяет качественно оценить биомеханические законы управления движениями, которыми руководствуется оператор при выполнении поставленной задачи. Эти законы необходимы для получения возможности оценить оптимальность работы различных 3752 л1ераторов и изменение характера их работы в зависимости от различных мотивационных установок, а также для выяснения механизма формирования процесса .управления в сложных системах человекмашина. Целью изобретения является повышение точности оценки за счет получения количественных оценок биомеханического зако на управления движениями. Указанная цель достигается тем, что в известное устройство, содержащее генератор, подключенный к блоку индикации и блоку синхронизации, соединенному через последовательно включенные блок управления и измеритель параметров с блоком регистрации, блок ввода ответных действий оператора, соединенный с блоком индикации и вычислителем ошибок, введены блок адаптивного моделирования изучаемых процессов, соединенный с генератором., и вычислителем ошибок, и вычислитель оценок закона управления, подключенный к измерителю параметров и к блоку адаптивного моделирования изучаемых процессов, содержащему узлы моделирования ответных реакций, один из которых через последовательно включенные узлы дифференцирования соединен с другими узлами моделирования ответных реакций, выход каждого из которых через последовательно включенные соответствую щие узлы умножения и интегрирования соединен со входами узлов моделирования ответных реакций, содержащих нелинейный преобразователь, соединенный через одни делители напряжения с первым сумматором, а через последовательно включенные соответствующие элементы умножения и другие делители напряжения - со вторым и третьим сумматорами, первый суммато через последовательно соединенные первый интегратор, второй сумматор, второй интегратор, третий сумматор и третий ин тегратор подключен к делителям напряжения. Вычислитель оценок закона управления содержит узлы умножения, первый и второй из которых через соответствующие сумматоры подключены к нелинейным преобразователям, и усилители, соединен ные со входами сумматоров, один из уси лителей подключен ко входу вычислителя, а другой - к выходу третьего узла умножения. Сущность изобретения заключается в том, что в устройстве моделируется ответная реакция испытуемого Ylt), Пре образуя сигнал от генератора задаваемы ункций sit) в сигнал x{i), согласно равнению в общем ввде n 0n-i - «i ) ) .., х(о)х(о). ля случая получения трех оценок это равнение имеет вид: + x s(t) х{о х(о v(o) o игнал х (t) сравнивается с ответом спытуемого и вычисляется ошибка e(t) о формуле: eli| c(t)-V(i) (3) тветный сигнал оператора V (i) аппрокимируется выходным сигналом х It) дифференциального уравнения () из условия минимума функционала 1 )-Y(t))2dt min (4) где Т - интервал наблюдения. Непосредственное преобразование сигнала s (t) в X (i) по уравнению (1) осуществляется первым блоком модели ответной реакции. Вычислитель оценок закона управления восстанавливает биомеханический закон управления (5), предполагая, что оператор в процессе решения задачи управления руководствовался некоторым принципом оптимальности. Для этогчэ вычисляются неизвестные коэффициенты ь , .. С f, функционала I, описывающего биомеханический закон управления в общем виде, . т .2 (5) (,y4.... а для случая получения трех сщенок это уравнение имеет вид т(6) I.I(a tfa S|y t fUt.min где Т - интервал наблюдения. Вычисление неизвестных коэффициентов ii, осуществляется по формулам Д., и для случая получения трех оценок они равны (7) D , 1/0| -2а,., Эти коэффициенты определяются и регистр1фуются для каждой реакции оператора и могут х актеризовать механизм формирования процесса управления в сложных системах человек-машина, а также оптимальность работы оператора. На фиг. 1 приведена схема рассматриваемого устройства, содержащая генератор 1 (задаваемых функций), блок 2 индикации, блок 3 ввода ответных действий оператора, вычислитель 4 ошибок, блок 5 регистрации, измеритель 6 параметров, блок 7 управления, блок 8 синхронизации, блок 9 адаптивного управления, вычислитель 10 оценок закона управления, 11, 12 - входы, 13 - 16 - выходы блока 9 (входы управления). На фиг. 2 представлена схема блока 9, который содержит узлы 17-20 моделирования ответных реакций, узлы 21-23 ди ференцирования, узлы 24-26 умножения узлы 27-29 интегрирования. На фиг. 3 представлена схема узла моделирования ответных реакций, на кото ром изображены вход ЗО и выход 31 узла, сумматоры 32-34, интеграторы 35-37, делители 37-4О, 41 напряжения, узлы 42 и 43 умножения и нелиней ный преобразователь 44. На фиг, 4 представлена схема вычислителя 10 оценок закона управления, где изображены выходы 45-47 вычислителя, узлы 48-50 умножения, сумматоры 51, 52, усилители 53 и 54, нелинейные преобразователи 55,56. Устройство для оценки деятельности операторов систем управления работает следующим образом. Оператору предъявляют задающий тест-сигнал в виде ступенчатой функции, на который он должен дать ответную дви гательную реакцию так, чтобы, по его мнению, рассогласование задающего сигнала и ответного было бы минимальным. этом, задающий тест-сигнал с генератора 1 поступает также на вход 11 блока 9, на выходе 13 которого фсрмируется сигнал х (t) согласно уравнению (1), Этот сигнал поступает на один из входов вычислителя 4 опшбок, на другой вход которого подается с блока 3 ответный сигнал оператора Ч (t). Сигнал (UH6KHe(t) уравнения (3) с выхода вычислителя 4, в свою очередь, подается ка второй вход 12 блока 9, который начинает подстраивать свой выходной сигна так, чтобы он наиболее приближался по форме к ответу оператора согласно условию (4). Это осуществляется следующим образом. Входной задающий тест сигнап поступает на вход узла 17, который преобра7586 зует этот сигнал согяайно уравнению (2). Далее преобразованный сигнал последовательно дифференцируется узлами 21-23 и с выходов каждого из них поступает на входы трех узлов 18-20, идентичных узлу 17, а с выходов каждого из этих узлов преобразованные сигналы поступают раздельно на выходы трех узлов 24-26, На вторые входы всех этих узлов подается сигнал ошибки с выхода вьиислителя 4, После операщш перемножения сигналы с выходов узлов 24-26 поступают на соответствуюпше интеграторы - узлы 27-29 интегрирования. Величина напряжения на выходах этих интегратсров 27-29 оказывается пропорциональна Градиентам функционала I условия (4) и соответствует величинам коэффициентав a, &„, a. уравнения (2). Эти сигналы с выходов трех интеграторов 27-29 подаются на три управляющих входа всех узлов 17-2О и изменяют коэффициенты а, й,о уравнения (2) согласно уравнению градиентного спуска А. где 1,2,3,.., п J j j - весовые коэффициенты; votij -выходные сигналы узлов 24-26, минимизируя тем самым значение функционала 1 уравнения (4), Узлы 17-20 преобразуют входные сигналы в выходные согласно уравнению (1) следующим образом. Входной сигнал поступает на управляемый делитель 38 напряжения, и далее на цепочку, состоящую из 3 -X сумматоров 32-34 и 3-х интеграторов 35-37, сигнал с выхода последнего интегратсра 37 подается чере 39-41 иа входы всех сумматоров и выход 31 узла. На входы упршленкя - выходьг14-16 подаются сигHfinbt, пропорциональные величинам коэффициентов a,j, а„, а уравнения (2), Управляющий сигнал с выхода 16 подается на нелинейный гфеобразователь 44, который щэеобразует сигнал а в сигнал -д Последний сигнал управляет двумя делителями, минимизщ)уя тем самым значение функционала 1 уравнения (4). Узлы 17-2О (фиг. 3) преобразуют входные сигналы в выходные согласно уравнению (2) следующим образом. Входной сигнал- поступает через управляемый делитель нащ)51жения 38 на цепочку, состоящую из чередующихся сумматоррв 32-34 и интеграторов 35-37, Сигнал с выхода последнего элемента цепочки - интегратора 37 - подается через управляемые делители напряжения 39-41 на входы всех сумматоров и выход 31 узлов 17-20. На входы управления 14-16 этих узлов, подаются сигналы, пропорциональные величинам коэффициентов а, а, aj. Причем, управляющий сигнал апПодается на вход 16 управления v- преобразуется нелинейным преобразователем 44 в сигнал пропорциональный I/a и поступает на управляющие входы двух делителей 38, 39 и входы двух узлов 42, 43, А управляющие сигналы а, а подаются соответственно на входы 15, 14 управления, связанные со вторыми входами двух узлов 42, 43. Управляющие сигналы, пропорциональные отношению -2 и -22- , с выходов узлов ,QS 42 и 43 поступают на управляющие входы соответствующих делителей 38-41, В результате изменения коэффициентов передачи этих делителей изменяются пере даточные характеристики узлов 17-2О. При этом сигнал с выхода узла 17 приближается к сигналу ответа оператора. Одновременно с преобразователями сигналов в блоке 9 величины коэффициенуравнения 2 3 сигналов с выходов 14-16 поступают в вычислитель 1О оценок закона управления, где каждому набору коэффициентов а из множества гладких (без скачков) сигналов X. (i) сопоставляется своя задача оптимального управления на основе биомеханического критерия качес ва работы оператора - уравнение (5). В вычислителе 1О оценок закона управл ния восстанавливается закон управления которым руководствовался оператор, отвечая на задающий тест-сигнал. Для это цели нелинейными преобразователями вычислителя 1О вычисляются неизвестны коэффициенты функционала I./I.J :1 , 2На2 2)5 Вычисленные для каждой реакции значения коэффициентов далее поступают в блоки 5 и 6. Измерение и регистрация . этих коэффициентов происходит как в процессе реакции испытуемого н интервале времени наблюдения Т, так и при повторяющихся через интервал Т ис пытаниях оператора, для чего регистрац и измерение коэффициентов синхронизиро вано по Времени с появлегшем задающег сигнала при помо.щи блока 8. 7 5 88 Коэффициенты с i , С 2 з определяют оличественное выражение биомеханичесого критерия работы человека-оператора служат объективной оценкой той оптиальности, которую оператор реализует эксперименте, и которая меняется от ператора к оператору, а также от функионального состояния оператора. Предлагаемое устройство применяется для контроля и исследования работы оператора и позволяет получать количественные оценки биомеханического закона управления, характеризующего деятельность оператора, и те критерии, которыми он руководствуется в процессе рещения задачи управления. Ясный физический смысл каждого из компонентов биомеханического закона управления ( отклонение, скорость, ускорение) позволяет легко интерпретировать полученные оценки. Кроме того, при получении оценок биомеханического закона управления появляется возможность оценить влияние и информационное значение высших производных о процессе управления. Оператор в процессе работы сам выбирает из всего набора возможных управлений наиболее, по его мнению, оптимальные и руководствуется ими. При этом названные критерии остаются неизвестными для внешнего наблюдения. Между тем, именно биомеханический за- кон управления движениями позволяет количественно охарактеризовать эти критерии и, тем самым, оценить оптимальность работы оператора, а также отразить изменение характера управления связанное с обучением, состоянием оператора, состоянием внешней среды (машины). Полученные количественные оценки биомеханического закона управления можно использовать как для исследования процессов управления в системах человек-машина, так и для оценки деятельности оператора, оцтимальности его работы, необходимые при профессиональных отборах и для оценки его готов«ости (обученности). Кроме того усредненные количественные оценки могут быть использованы при оценке систем управления на этапе ихпроектирования. Формула изобретения 1. Устройство для оценки Деятельности операторов систем управления, содержащее генератор, подключенный к блоку индикации и блоку синхронизации, соединенному через последовательно включе ные блок управления и измеритель параметров с блоком регистрации, блок ввода ответных действий оператора, соединенный с блоком ивдикации и вычислите лем ошибок, отличающееся тем, что, с целью повышения точности оценки, оно содержит блок адаптивного моделирования изучаемых процессов, сое диненный с генератором и вычислителем ошибок, и вычислитель оценок закона управления, подключенный к измерителю параметров и к блоку адаптивного моделирования изучаемых процессов. 2.Устройство по п. 1, о т л ичающееся тем, что в нем блок адаптивного моделирования изучаемых процессов содержит узлы моделирования ответных реакций, один из которых через последовательно включенные узлы дифференцирования соединен с другими узлами модел1фования ответных реакций выход каждого из которых через последовательно включенные соответствующие узлы умножения и интегрирования соединен со входами узлов, моделирования ответных реакций. 3,Устройсгво по п. 2, отличающееся тем, что в нем узел моделирования ответных реакций содержит нелинейный преобразователь, соединенный через одни делители нагфяження с первым сумматором, а через последовательно включенные соответствующие элементы умножения и другие делители напряжения - со вторым и Третьим сумматорами, первый сумматор через последовательно соединенные первый интегратор, второй сумматор, второй интегратор, третий сумматор и третий интегратор подключен к делителям на1фяжения. 4, Устройство по п. 1, отличающееся тем, что в нем вычислитель оценок закона управления содержит узлы умножения, первый и второй из которых через соответствующие сумматоры подключены к нелинейным преобразователям, и усилители, соединенные со входами сумматоров, один из усилителей под ключей ко входу вычислителя, а другой к выходу третьего узла умножения. Источники информации, 1финятые во внимание при экспертизе 1.Авторское свидетельство СССР № 435554, кл. G О9 В 7/02, 1974., 2.Авторское свидетельство СССР по заявке М 2551849/18-12, кл. Q О9 В 9/ОО, 1977 (прототип). 3.Олейников В. А.,Зотов Н. С. и Пришвин А. М. Основы оптимального и экстремального управления, М., 1969.
40
Л fS /tf,
ФРС. I
V4
4i
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ | 2005 |
|
RU2295151C2 |
| Тренажер операторов систем управления | 1983 |
|
SU1138821A1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| Устройство для обучения операторов систем управления электроприводом постоянного тока | 1987 |
|
SU1441443A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОПОДОБНОЙ СЕТИ | 1992 |
|
RU2094843C1 |
| Устройство для оценки деятельности операторов автоматизированной системы управления | 1984 |
|
SU1203570A1 |

kb
5i
S5
k kbI-}
50
f
Г
Фиг. ft
