1
Изобретение относится к области техники программного управления движущимися объектами и предназначено для использования в системах автоматического управления, например, транспортными средствами.
Известны устройства для управления подвижными объектами, осуществляющие управление лишь по одной координате .
Такие устройства не обладают повыщенной точностью.
Наиболее близким к изобретению техническим решением является устройство для управления подвижными объектами, содержащее головку записи и расположенные соосно двухщелевую и однощелевую головки воспроизведения, первая из которых соединена через включенные последовательно первый фазовый детектор и пороговый элемент с первым входом элемента И, а вторая подключена через второй фазовый детектор к входам первых параллельных цепей, состоящих из включенных последовательно порогового элемента и элемента НЕ и подключенных выходами ко второму и третьему входам элемента И, выход которого и входы параллельных цепей соединены соответственно с первым и вторым входами исполнительного блока, подключенного выходом к приводу .
Недостатком известного устройства является невысокая точность наведения транспортного средства по двум координатам, вдоль которых размещен программоноситель, из-за возможных отклонений подвижного объекта от прямолинейных перемещений 2.
С целью повышения точности устройство
Ю содержит дополнительную однощелевую головку воспроизведения и перпендикулярно ей третий фазовый детектор и вторые параллельные цепи, состоящие из включенных последовательно порогового элемента
15 и элемента НЕ, причем выход дополнительной однощелевой головки воспроизведения подключен через третий фазовый детектор к третьему входу исполнительного блока и входам вторых параллельных цепей, выходы
20 которых соединены с четвертым и пятым входами элемента И.
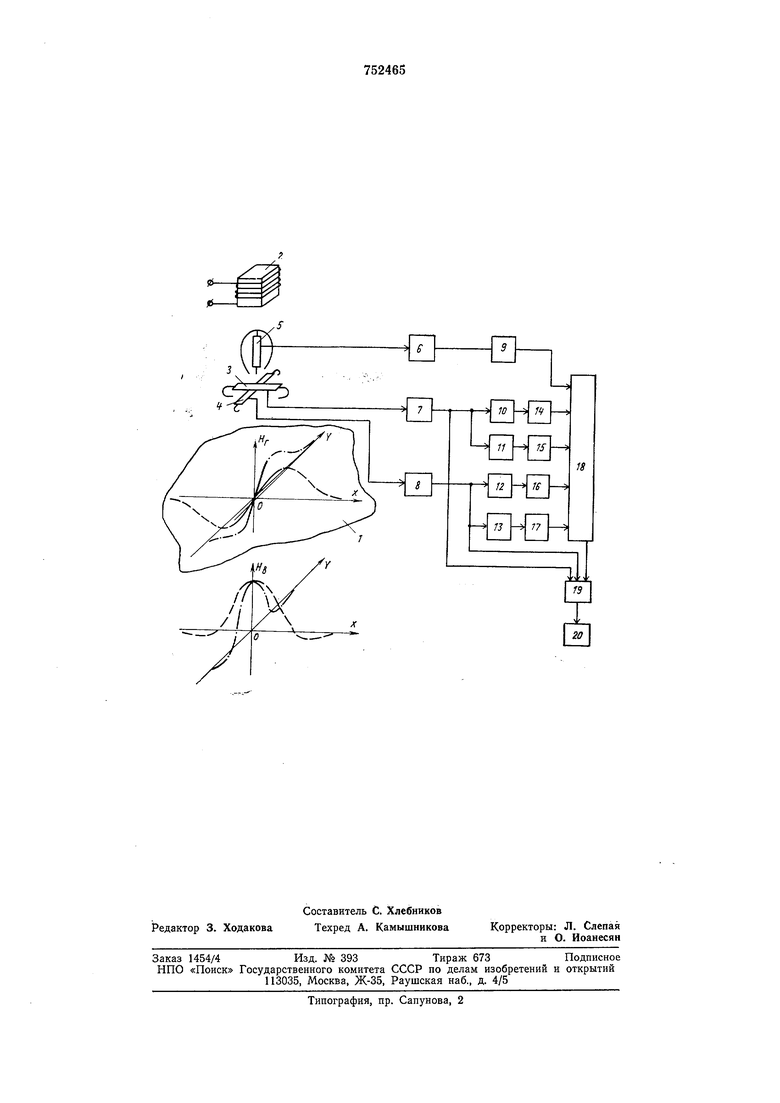
На чертеже изображена схема устройства. Оно содержит магнитоноситель 1, головку записи 2, подвижный объект (на чертеже не показан) с закрепленными на нем однощелевыми головками воспроизведения 3, 4 и двухщелевой головкой воспроизведения 5, фазовые детекторы 6-8, пороговые
30 элементы 9-13, логические элементы НЕ
14-17, логический элемент И 18, исполнительный блок 19 и привод 20.
Устройство работает следующим образом.
Предварительно на носитель 1 наносятся магнитные метки с помощью стержневой записывающей головки 2. Конфигурация внещнего магнитного поля метки, а именно горизонтальная Нг и вертикальная Нв составляющие напряженности, измеренные вдоль осей координат X и Y, представлена на чертеже. При движении объекта, на котором расположен блок головок воспроизведения 3-5, в момент вхождения центра блока головок 3-5 в зону магнитной метки на их выходах появляются сигналы, которые через фазовый детектор 6 (с двухщелевой головки 5) и через фазовые детекторы 7 и 8 (с однощелевых головок 3 и 4 соответственно) поступают на пороговые элементы 9-13 и исполнительный блок 19. Управление осуществляется по двум координатам X R Y.
В момент совпадения центра блока головок 3-5 с центром магнитной метки сигналы головок 3, 4 не подаются, а на все входы логического элемента И 18 поступают импульсы, включающие этот элемент, который вырабатывает команду на точный останов подвижного объекта.
Предлагаемое устройствЪ обеспечивает высокую точность наведения подвижных объектов, например, кранов, кранов-штабелеров, каретки металлорежущего станка при раскрое листового проката и т. д.
Формула изобретения
Устройство для управления подвижными объектами, содержащее головку записи и расположенные соосно двухщелевую и однощелевую головки воспроизведения, первая из которых соединена через включенные последовательно первый фазовый детектор и пороговый элемент с первым входом элемента И, а вторая подключена через второй фазовый детектор к входам первых параллельных цепей, состоящих из включенных последовательно порогового элемента и элемента НЕ и подключенных выходами ко второму и третьему входам
элемента И, выход которого и входы параллельных цепей соединены соответственно с первым и вторым входами исполнительного блока, подключенного выходом к приводу, отличающееся тем, что, с целью
повыщения точности устройства, оно содержит дополнительную однощелевую головку воспроизведения, установленную соосно с основной однощелевой головкой воспроизведения, и перпендикулярно ей третий фазовый детектор и вторые параллельные цепи, состоящие из включенных последовательно порогового элемента и элемента НЕ, причем выход дополнительной однощелевой головки воспроизведения подключен через
третий фазовый детектор к третьему входу исполнительного блока и входам вторых параллельных цепей, выходы которых соединены с четвертым и пятым входами элемента И.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 574758, кл. G ИВ 5/48, 1977.
2.Евтухов Ю. Г. и др. Применение магнитной записи для автоматического наведения крана при сборке. - Сб. «Научно-технический прогресс в технологии, механизации и автоматизации сборочных работ в мащиностроении. М., Машгцз, 1976, с. 73-
76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения двоичной информации | 1979 |
|
SU1267450A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ Л\ЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1971 |
|
SU298858A1 |
| Устройство для определения местополо-жЕНия РЕльСОВОгО ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU824239A1 |
| Устройство для записи и считывания информации с магнитного носителя | 1981 |
|
SU1003117A2 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1971 |
|
SU299858A1 |
| Устройство для записи и считывания информации с магнитного носителя | 1984 |
|
SU1236517A2 |
| Устройство для нахождения центра магнитной метки | 1977 |
|
SU664203A1 |
| Устройство для определения местоположения магнитных головок | 1981 |
|
SU959153A1 |
| Устройство для точного останова транспортного средства | 1987 |
|
SU1525742A1 |
| Устройство для определения местоположения подвижных объектов | 1973 |
|
SU726150A1 |