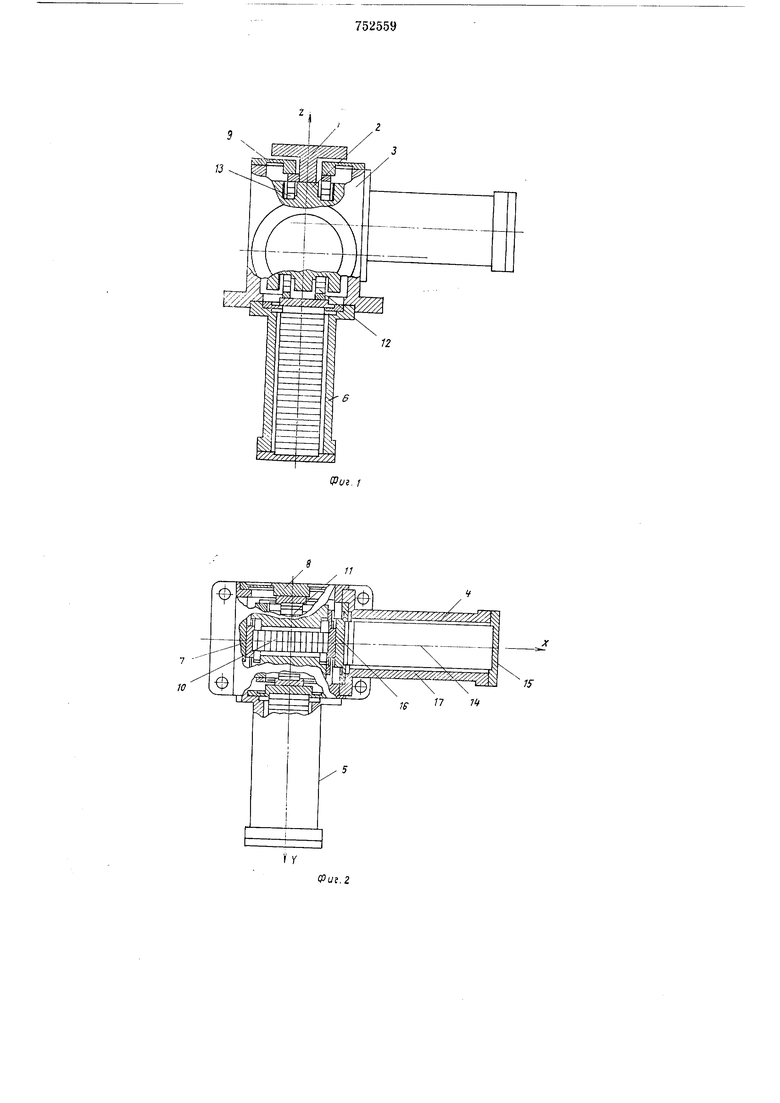
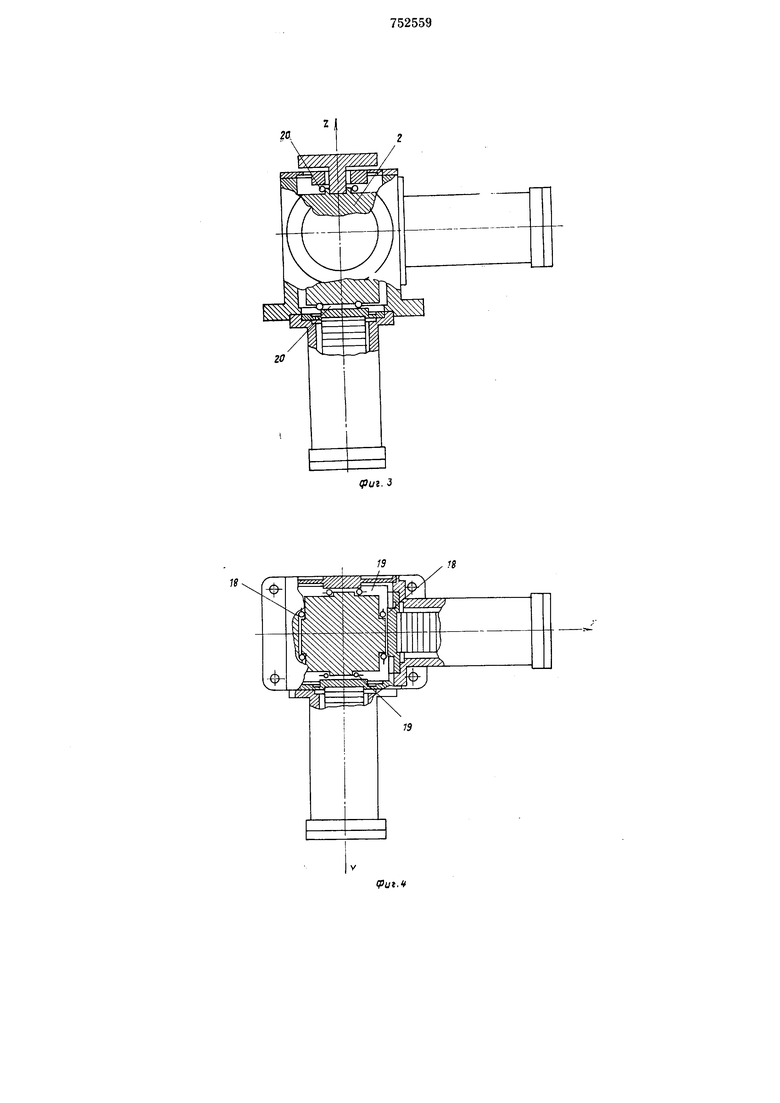
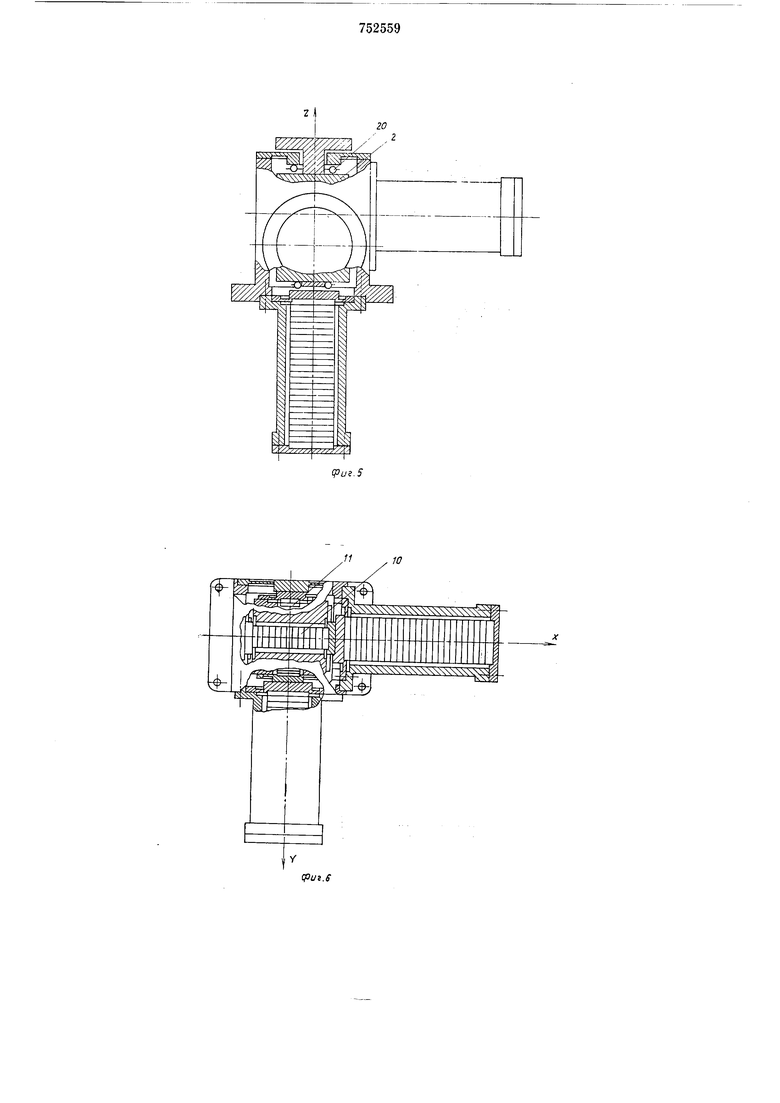
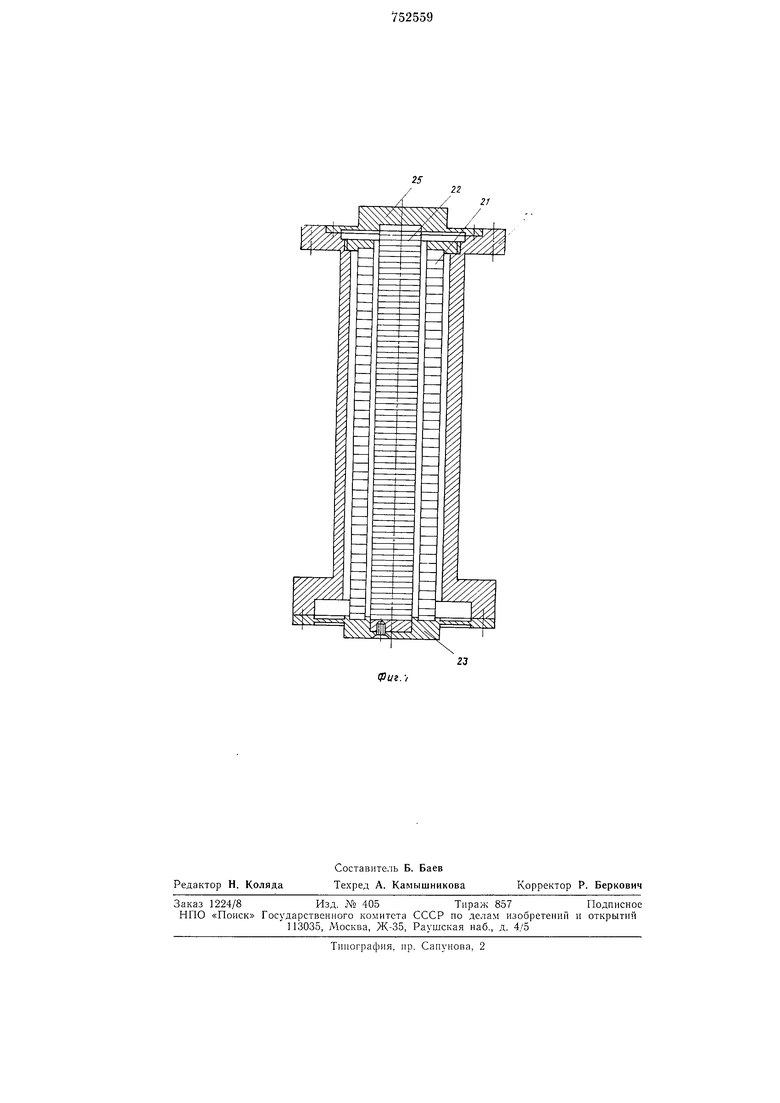
также прикреплены к корпусу с протпвополол ных от привода сторон, а координатный стол укреплен на центральном держателе. С целью увеличения диапазона перемещений пьезоэлектрические приводы устройства выполнены в виде двух пьезоэлектрических составных толкателей, расположенных один внутри другого, причем одни торцы толкателей скреплены между собой, второй торец внешнего толкателя прикреилен к корпусу, а второй торец внутреннего толкателя поджат к центральному держателю через силовую мембрану. Элементы разгрузкн устройства выполнены в виде двух взаимно перпендикулярных нолуволновых пьезоэлектрических вибраторов и двух перпендикулярных им четвертьволновых вибраторов, причем полуволповые вибраторы размещены внутри центрального держателя и прикреплены торцами к мембранам, закрепленным на держателе, а четвертьволновые вибраторы расположены па центральном держателе и прикреплены к нему одним торцом. Как варнант элементы разгрузки могут быть выполнены в виде опорных систем качения, расиоложеиных попарно с протпвоноложных сторон на цептральпом держателе. Элементы разгрузки могут быть выполнены также Б виде двух взаимно перпендпкулярных полуволповых пьезоэлектрических вибраторов, расположенных внутри центрального держателя и пары опорных снстем качения, расположенных перпендикулярно вибраторам с противоположиых сторон держателя. На фиг. 1 и 2 иоказаны две проекции устройства с частичным разрезом для случая вибрационной разгрузки центрального держателя. На фиг. 3 и 4 показаны две проекции устройства для случая разгрузки центрального держателя с помощью опорных систем качения. На фиг. 5 и 6 показаны две проекции устройства для случая комбинированной разгрузки центрального держателя с помощью вибраторов и опорных систем качения. На фиг. 7 показана телескопическая конструкция пьезоэлектрического толкателя. Устройство для точной установки положения объекта (для случая трехкоордннатного нозицирования) содержит (фиг. 1 и 2): координатный стол 1, жестко прикрепленный к центральному держателю 2, номещенному в корпус 3. К. корпусу жестко крепятся три взаимноперпендикулярных пьезоэлектрических ирпвода 4, 5 и 6 для одновременной установки по координатам X, Y и Z, причем первые два привода расположены параллельно плоскости координатного стола. С противоположных от прпводов сторон к корпусу жестко крепятся три спловых мембраны 7, 8 и 9, осуществляющие иостояииый прижим цснтральиого держателя к приводам. Центральный держатель нодвижно соединен с ириводами с иомощью элементов разгрузки - двух взаимно перпендикулярных полуволновых пьезоэлектрических вибраторов 10, 11, размещенных внутри держателя, и периендикуляриых им двух четвертьволновых пьезоэлектрических вибраторов 12, 13, жестко закреплеппых на центральном держателе. Спловое замыкание происходит от силовых мсмбраи, через элементы разгрузки к приводам. Каждый привод состоит из пьезоэлектрического составного толкателя 14, жестко закрепленного между основанием 15 и мембраной 16, передающей перемещение толкателя нейтральному держателю, и помещенного внутри стакана 17, жестко связанного с основанием и мембраиой и жестко прикрепленного к корпусу со сторопы мембраны. Устройство работает следующим образом. Для перемещения, например, по оси X на пьезоэлектрический составной толкатель 14 привода 4 подается папряжеппе в диапазопе от О до ±300 в, вызывающее соответствующую деформацию толкателя. Одновременно на пьезоэлектрический полуволиовой вибратор 11 и четвертьволновые вибраторы 12, 13 иодается переменное нанряженне УЗ-частоты, величина которого составляет 30-50 В. В результате вибрации статическое трение в парах: полуволновой впбратор 11 - сплозая мембрана 8, вибратор И - мембр:.па при;:с,;а 5, четвертьволновой вибратор 12 - мембрана привода 6, четверть волновой вибратор 13 - силовая мембраиа 9, - переходит в меньгпее по велпчпне кпнетическое трение, разрешая перемещение центрального держателя 2 и прикреплепного к нему координатного стола 1 вдоль оси Л . При этом направляющими являются силовая мембрана 8 - мембрана привода 5 и силовая мембрана 9 - мембрана привода 6. В процессе работы силовая мембрана 7 постоянно прижимает центральный держатель 2 через вибратор 10 к мембране привода 4, отслеживая перемещепие толкателя привода 4. Аналогичным образом происходит перемепгение координатного стола по осям Y и Z. Возможно перемещение одновременно но всем трем осям. Подвнжпое соединение центрального держателя 2 с силовыми мембранами и мембранами приводов может осуществляться с помощью элементов разгрузки в впде трех пар опорных систем качения 18, 19, 20 (фпг. 3 п 4). В этом случае трение скольженпя между держателем и мембранами замеияется меиьшпм ио величине тренпем качения. Две оиориые системы качения,
лежащие на оси какого-либо привода, осуществляют силовое замыкание силовой мембраны, центрального держателя и прнвода н создают подвижное соединепис держателя с двумя другими взаимноиерпенднкулярнымп приводами.
Элементы разгрузки могут быть выполнены в впде двух взаимно пернеидикулярных иолуволновых ньезоэлектрических вибраторов 10, 11 и нары опорных систем качения 20, расноложеппых нернендикулярно впбраторам (фнг. 5 и 6). Для увеличения дианазона перемещения устройства по координатам X, Y н Z нрнменяются приводы телескопической коиструкции (фиг. 7), в которой два составных пьезоэлектрических толкателя 21 н 22 размещены один внутри другого, прн этом одни торцы обопх толкателей жестко закреплены между собой с помощью центрирующей мембраны 23, жестко прикреиленной к стакану 24, второй торец толкателя 21 жестко прикреплен к стакану 24, который жестко кренится к корпусу устройства, а второй торец толкателя 22 жестко соединен с мембраной 25, жестко нрикрепленной к стакану 24 н передающей перемещение толкателя 22 центральному держателю 2.
Для перемещения мембраны 25 вверх на пьезоэлектрический составиой толкатель 21 подается напряжение от О до ±300 В, вызывающее его сжатие, а на пьезоэлектрический составной толкатель 22 - напряжение от О до ±300 В иротивоположной полярности, вызывающее его расшнреппе. Для перемещения мембраны 25 вииз полярпости напряжеиий, подаваемых иа пьезоэлектрические составиые толкатели 21 и 22, меняются.
Силовое замыканне приводов и центрального держателя с помощью силовых мембран, а также значительная осевая жесткость составных пьезопреобразователей, использующихся в приводах, приводят к повышеиию иадежности работы устройства при иропзвольиой ориентации в пространстве, повышению точности нозициоиировання до ±0,1 мкм е одновременным увеличением пагрузочиой способности устройства до десятков килограмм.
Опытный макет устройства прошел лабораторные иепытаиия и иоказал следующие параметры:
Диапазои иеремещеиия по осям X, Y, Z 0-80 мкм;
Точность воспропзведеиия положения ±0,1 мкм;
Полоса иропускания устройства до 100 Гц;
Нагрузочная способность 10 кг.
6 изобретения
1.Устройство для точной установкн положения объекта, содержащее кориус, коордииатный стол н ньезоэлектрпческне приводы но коорд1Н1атпым осям, отличающееся тем, что, с целью увеличенпя нагрузочной способности и точностнустановкн, оно содержит нейтральный держатель, подвнжпо установленный в корнусе на элементах разгрузки н поджатый к приводам силовыми мембранами, причем приводы жестко прикреплены к корпусу, силовые мембраны также прикреплеиы к корпусу с противоиоложных от прнвода сторон, а координатный стол укренлен на центральном держателе.
2.Устройство но н. 1, отличающееся тем, что пьезоэлектрические приводы выиолнепы в виде двух иьезоэлектрпческих составных толкателей, расположенных один внутри другого, причем одни торцы толкателей скреплены между собой, второй торец внешнего толкателя прикреплен к корпусу, а второй торец внутреннего толкателя поджат к центральному держателю через силовую мембраиу.
3. стройетво но п. 1, отличающееся тем, что элемепты разгрузки выполнены в
внде двух взаимно перпенднкулярных нолуволновых ньезоэлектрнческих вибраторов и двух иернендикулярных нм четвертьволновых внбраторов, прпчем полуволновые вибраторы размещены внутри центрального
держателя и прикреплены торцами к мембранам, закреплеппым иа держателе, а четвертьволновые внбраторы расположены на центральном держателе н прикреплены к нему одннм торцом.
4. Устройство по п. 1, отлнчающееся тем, что элементы разгрузки выполнены в впде опорных систем каченпя, расположенных попарно с нротивоположных сторон на центральном держателе.
5. Устройство по п. 1, отличающееся тем, что элемепты разгрузки выиолнены в виде двух взанмно нерненднкулярных нолуволновых пьезоэлектрнческих вибраторов, раеиоложенпых внутри центрального держателя н пары опорных систем каченпя, расположенных перпендикулярно вибраторам с противоиоложных сторон держателя.
Источники информации, нрннятые во впнмание при экспертизе
1. Патент США As 3808488. кл. 310-8.2, опубл. 1974.
2.Авторское свидетельство СССР 548912, кл. П OIL 41/10. опубл. 25.11.78.
3.Патент США № 3928778, кл. 310-8.3, опубл. 23.12.75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной установки положения объекта | 1978 |
|
SU783892A2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2000 |
|
RU2222729C2 |
| ФОРСУНКА С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОДАЧИ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2272169C2 |
| Пьезоэлектрический линейный шаговый двигатель | 1978 |
|
SU752560A1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2011 |
|
RU2471098C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| Устройство относительного ориентирования для сборочного станка-автомата | 1978 |
|
SU770725A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ МЕМБРАННОЕ УСТРОЙСТВО | 2014 |
|
RU2575186C1 |
| Регулятор давления газа | 1990 |
|
SU1716493A1 |
/
75го.
9- f
