Изобретение относится к области электромеханики и может быть использовано в качестве привода для линейного и вращательного перемещения объектов по направляющим в системах точного позиционирования, например, в качестве привода для координатных столов.
Известно устройство, содержащее основание, пьезоэлемент, один конец которого закреплен на основании, перемещаемую каретку (см. патент РФ №225645, кл. МПК H01L 41/09, публ. 27.07.2005 г.)
Известно устройство для перемещения объекта вдоль одной координаты, содержащее основание, пьезоэлемент, подвижную каретку, прижим (см. патент РФ №2297072, кл. H01L 37/28, H01L 41/095 публ. 10.04.2007 г. - прототип).
Недостатком данных устройств перемещения инерционного типа является небольшой диапазон перемещений, к тому же конструктивная жесткая связь между пьезоэлементом и основанием не позволяет использовать подобные устройства в качестве приводов для координатных столов с направляющими качения из-за малой гибкости пьезоэлемента, приводящей к его поломке.
Целью предлагаемого технического решения является увеличение диапазона и стабильности перемещения по направляющим и повышение надежности работы.
Указанная цель достигается тем, что в известном техническом решении для перемещений (инерционный пьезоэлектрический привод), включающем пьезоэлемент с опорой на одном из его концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, согласно изобретению, между пьезоэлементом и основанием расположена упругая вставка, одной стороной прикрепленная ко второму концу пьезоэлемента, а другой к основанию, причем вставка выполнена так, что она деформируема в направлении приложения сил прижима к опоре и жестка вдоль оси перемещения.
Кроме того, между пьезоэлементом и упругой вставкой расположена дополнительная инертная масса.
Кроме того, упругая вставка выполнена в виде плоских пружин, жестких в направлении перемещения.
Кроме того, упругая вставка выполнена в виде упругих шарниров, жестких в направлении перемещения.
Вторым вариантом достижения цели является устройство для перемещений (инерционный пьезоэлектрический привод), включающее пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, согласно изобретению, второй конец пьезоэлемента прикреплен к основанию посредством поворотного узла, выполненного с возможностью вращения опоры к фрикционной поверхности под действием сил прижима.
Кроме того, поворотный узел выполнен в виде вставленной во втулку оси.
Кроме того, поворотный узел выполнен в виде подшипника качения или шарнирного подшипника.
Третьим вариантом достижения цели является устройство для перемещений (инерционный пьезоэлектрический привод), включающее пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, согласно изобретению, между пьезоэлементом и основанием расположена вставка, одной стороной прикрепленная ко второму концу пьезоэлемента, а другой к основанию, причем вставка выполнена так, что она имеет степень свободы в направлении приложения сил прижима к опоре и жестка вдоль оси перемещения, а пьезоэлемент состоит из не менее чем двух первичных пьезоэлементов, прикрепленных друг к другу одними из своих концов и расположенных по одну сторону от места их крепления, причем подключенных к источнику питания так, что при расширении прикрепленных к опоре первичных пьезоэлементов, прикрепленные к вставке первичные пьезоэлементы сжимаются, и наоборот.
Кроме того, первичные пьезоэлементы выполнены в виде прямоугольных пьезопластин.
Кроме того, первичные пьезоэлементы выполнены в виде двух вставленных друг в друга соосных пьезоцилиндров.
Принципиальные схемы вариантов предлагаемого устройства, осуществляющего относительное перемещение основания и элемента с фрикционной поверхностью, приведены на фиг.1-6, где:
1 - пьезоэлемент;
2 - опора;
3 - упругая вставка в виде плоской пружины;
4 - основание;
5 - элемент с фрикционной поверхностью;
6 - прижимный элемент в виде спиральной пружины;
7 - упругая вставка в виде упругого шарнира;
8 - дополнительная инертная масса;
9 - прижимный элемент в виде плоской пружины;
10 - наконечник;
11 - поворотный узел;
12 - ось;
13 - втулка;
14 - верхняя пьезопластина;
15 - нижняя пьезопластина;
16 - крепеж;
17 - прокладка;
18 - центральная пьезопластина;
19 - боковые пьезопластины;
20 - внешний пьезоцилиндр;
21 - внутренний пьезоцилиндр.
На фиг.1 представлена конструкция устройства, состоящего из пьезоэлемента 1, с опорой 2 на одном из своих концов, а другим концом прикрепленного к упругой вставке в виде плоской пружины 3, которая закреплена на основании 4. Опора 2 прижата к элементу с фрикционной поверхностью 5 посредством прижимного элемента в виде закрепленной на основании 4 спиральной пружины 6.
Упругая вставка 3, выполненная с возможностью ее деформирования в направлении действующей на опору прижимной силы со стороны пружины 6, обеспечивает одинаковый фрикционный контакт между опорой 2 и фрикционной поверхностью 5 на всем диапазоне перемещения и тем самым обеспечивает стабильность процесса перемещения и невозможность поломки пьезоэлемента 1 при возможном изменении расстояния между основанием 4 и элементом с фрикционной поверхностью 5 в процессе перемещения.
Работа устройства осуществляется в двух режимах.
В первом режиме на пьезоэлемент 1 подается плавно изменяющееся напряжение, приводящее к изменению его линейных размеров. Фрикционно связанный с пьезоэлементом 1 через опору 2 элемент с фрикционной поверхностью 5 будет совершать при этом перемещения относительно основания 4 в соответствии с величиной деформации пьезоэлемента 1. Диапазон перемещения при этом режиме работы определяется величиной деформации пьезоэлемента 1 и обычно не превышает нескольких микрометров.
Во втором (шаговом) режиме работы, на пьезоэлемент 1 подается пилообразное напряжение. Во время медленной фазы пилы пьезоэлемент 1 плавно деформируется, перемещая за собой элемент с фрикционной поверхностью 5.
Во время быстрой фазы пилы пьезоэлемент 1 резко возвращается к своему исходному состоянию, а элемент с фрикционной поверхностью 5, благодаря своей инертной массе, практически остается на месте.
При следующем пилообразном импульсе процесс перемещения повторяется.
Когда порядок следования медленной и быстрой фаз меняется или же на пьезоэлемент 1 подается напряжение другой полярности направление относительного перемещения основания 4 и элемента с фрикционной поверхностью 5 изменяется на противоположное.
В шаговом режиме работы величина перемещения за каждый шаг определяется величиной деформации пьезоэлемента 1 и обычно не превышает нескольких микрометров. Однако при частоте импульсов порядка 10-15 кГц скорость перемещения составляет несколько десятков миллиметров в секунду.
При автоматизации заявляемыми приводами координатного стола (например, микроскопного) привод ставится или на его неподвижную часть, при этом элемент с фрикционной поверхностью располагается на его подвижной части, или же привод устанавливается на подвижной части стола, а элемент с фрикционной поверхностью располагается на его неподвижной части.
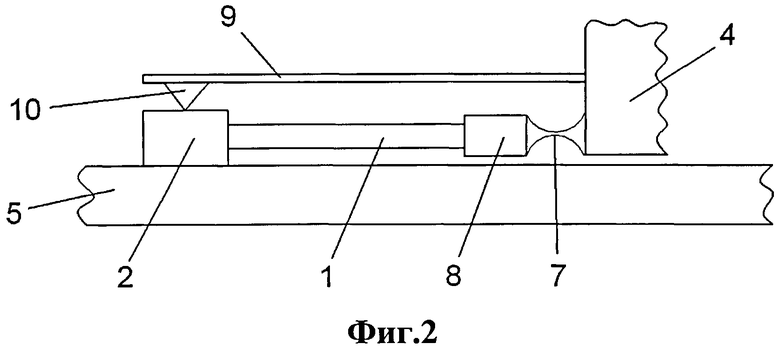
На фиг.2 приведен вариант привода, в котором упругая вставка выполнена в виде упругого шарнира 7, а для увеличения тяговых усилий устройства в случае недостаточной жесткости упругой вставки вдоль оси перемещения между пьезоэлементом 1 и упругим шарниром 7 расположена дополнительная инертная масса 8. Прижимный элемент выполнен в виде плоской пружины 9 с наконечником 10.
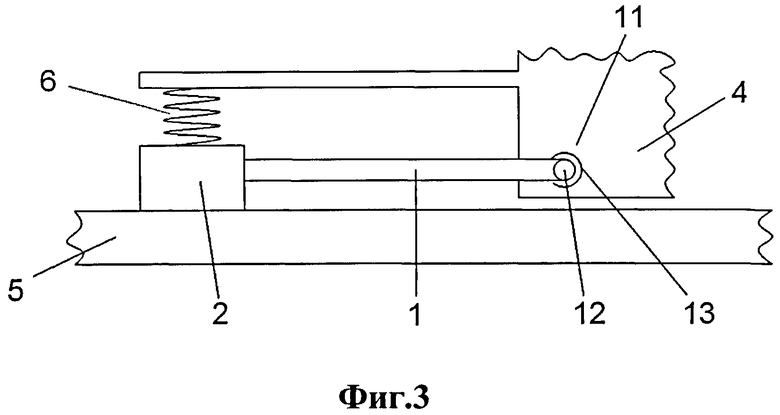
На фиг.3 приведен вариант привода, в котором, в отличие от первого варианта, стабильность фрикционного контакта между опорой 2 и элементом с фрикционной поверхностью 5 в процессе перемещения обеспечивается не за счет гибкости конструкции, а за счет вращения под действием прижимных сил опоры 2 к фрикционной поверхности 5, которое осуществляется посредством расположенного на основании 4 поворотного узла 11. На рисунке он выполнен в виде оси 12, вставленной во втулку 13 (на фиг.3 втулкой является цилиндрическое отверстие в основании 4). К оси 12 прикреплен пьезоэлемент 1. Прижимный элемент выполнен в виде спиральной пружины 6.
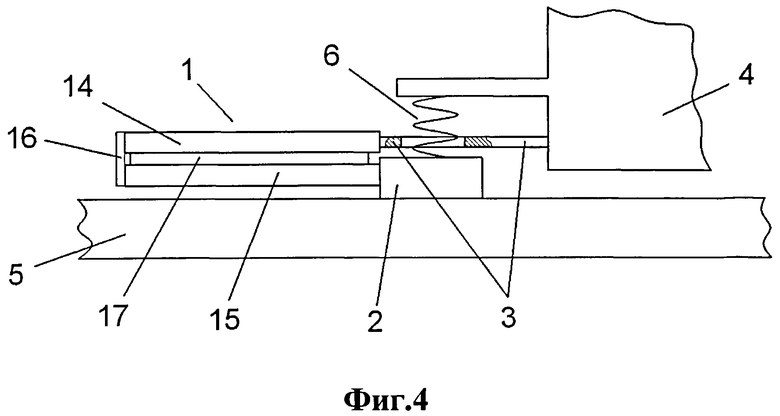
На фиг.4 приведен вариант привода, в котором, в отличие от предыдущих вариантов, для компенсации теплового расширения пьезоэлемента 1, вызванного его нагреванием во время работы на высоких частотах с большой амплитудой подаваемого напряжения, а также для увеличения значений его деформации при той же длине, пьезоэлемент 1 выполнен в виде прикрепленных, друг к другу одними из своих концов первичных пьезоэлементов, расположенных по одну сторону от места их крепления. На рисунке пьезоэлемент 1 состоит из двух первичных пьезоэлементов, выполненных в виде двух прямоугольных пьезопластин: верхней пьезопластины 14 и нижней пьезопластины 15, которые прикреплены друг к другу крепежом 16 одними из своих концов. Для повышения жесткости конструкции пластины стянуты нитью (не показана), а для предотвращения спаек электродов пластин при их относительном смещении в процессе работы привода, между пластинами расположена прокладка 17. Противоположный конец верхней пьезопластины 14 прикреплен к вставке, имеющей степень свободы в направлении приложения сил прижима к опоре 2 и выполненной в виде плоской пружины 3, а противоположный конец нижней пьезопластины 15 прикреплен к опоре 2. Прижим опоры 2 к элементу с фрикционной поверхностью 5 осуществлен спиральной пружиной 6, проходящей сквозь отверстие в плоской пружине 3. Верхняя пьезопластина 14 и нижняя пьезопластина 15 подключены к источнику питания противофазно, при расширении одной из них другая сжимается и наоборот.
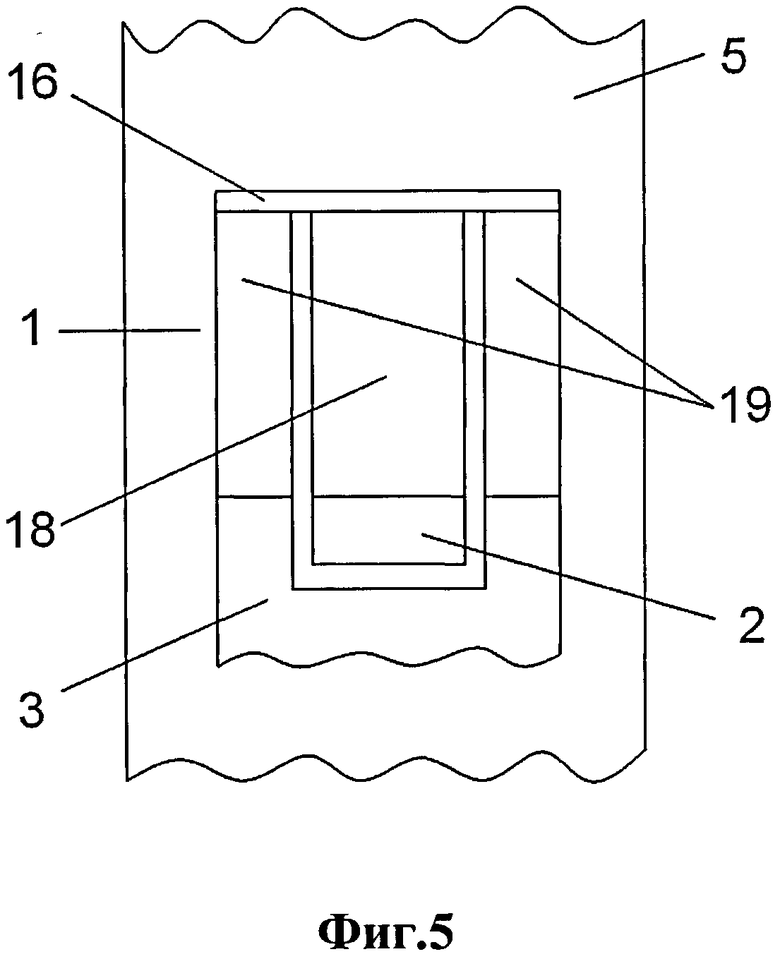
На фиг.5 приведен вариант привода, в котором пьезоэлемент 1 выполнен в виде прямоугольной центральной пьезопластины 18 и двух прямоугольных боковых пьезопластин 19, прикрепленных друг к другу одними из своих концов с помощью крепежа 16. Противоположный конец центральной пьезопластины 18 прикреплен к опоре 2, прижатой к фрикционному элементу 5, а противоположные концы боковых пьезопластин 19 прикреплены к вставке, выполненной в виде плоской пружины 3 (на рисунке показана часть привода, вид сверху, со стороны прижима). Центральная пьезопластина 18 подключена к источнику питания противофазно боковым пьезопластинам 19.
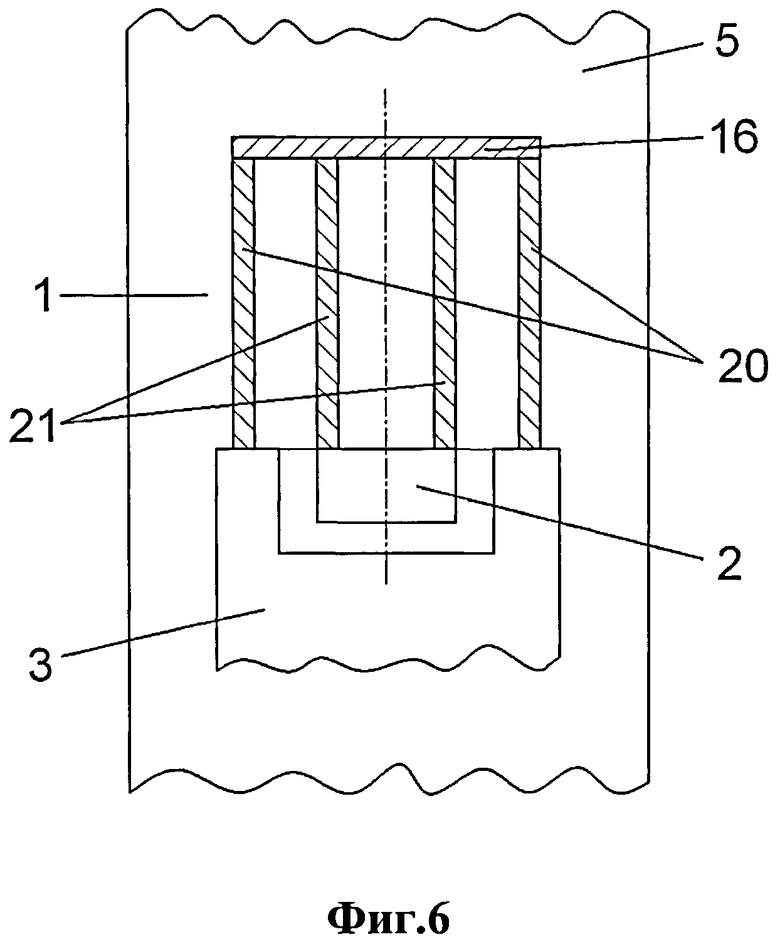
На фиг.6 приведен вариант привода, в котором пьезоэлемент 1 выполнен в виде соосно вставленных друг в друга внешнего пьезоцилиндра 20 и внутреннего пьезоцилиндра 21 и прикрепленных друг к другу одними из своих торцов посредством крепежа 16. Противоположный торец внешнего пьезоцилиндра 20 прикреплен к вставке, выполненной в виде плоской пружины 3, а противоположный торец внутреннего пьезоцилиндра 21 прикреплен к опоре 2, прижатой к фрикционному элементу 5 (на рисунке показана часть привода, вид сверху, со стороны прижима). Внешний пьезоцилиндр 20 и внутренний пьезоцилиндр 21 подключены к источнику питания противофазно.
Таким образом, использование предлагаемого изобретения позволит повысить надежность и стабильность работы автоматизированных приводом координатных столов с направляющими качения и с как угодно большим диапазоном перемещения, не предъявляя при этом жестких требований к точности изготовления направляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С СОСТАВНОЙ ОПОРОЙ | 2016 |
|
RU2635341C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| Пьезоэлектрический вибростенд | 1989 |
|
SU1747977A1 |
| ПЬЕЗОКЕРАМИЧЕСКИЙ ЗАЖИМ | 1992 |
|
RU2040107C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| УЛЬТРАЗВУКОВОЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2582889C1 |
Изобретение относится к области электромеханики и может быть использовано в качестве привода для линейного и вращательного перемещения объектов по направляющим в системах точного позиционирования, например в качестве привода для координатных столов. Техническим результатом является увеличение диапазона и стабильности перемещения по направляющим и повышение надежности работы. Пьезоэлектрический привод включает пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание. Между пьезоэлементом и основанием расположена вставка, одной стороной прикрепленная ко второму концу пьезоэлемента, а другой к основанию. Вставка выполнена так, что она имеет степень свободы в направлении приложения сил прижима к опоре и жестка вдоль оси перемещения. Пьезоэлемент состоит из не менее чем двух первичных пьезоэлементов, прикрепленных друг к другу одними из своих концов и расположенных по одну сторону от места их крепления. 3 н. и 6 з.п. ф-лы, 6 ил.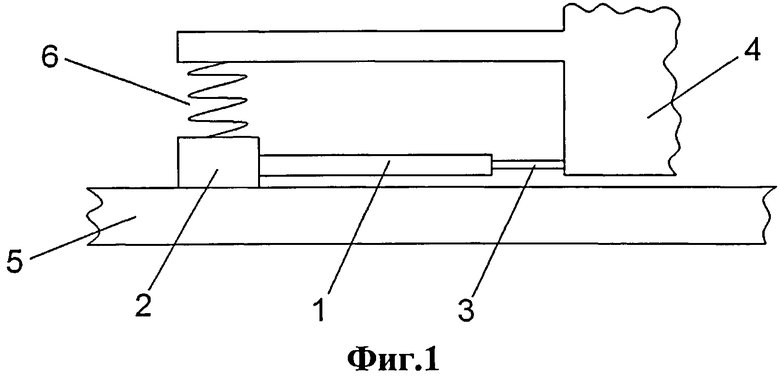
1. Пьезоэлектрический привод, включающий пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, отличающийся тем, что между пьезоэлементом и основанием расположена упругая вставка, одной стороной прикрепленная ко второму концу пьезоэлемента или к расположенной между пьезоэлементом и вставкой дополнительной инертной массе, а другой к основанию, причем вставка выполнена так, что она деформируема в направлении приложения сил прижима к опоре и жестка вдоль оси перемещения.
2. Привод по п.1, отличающийся тем, что упругая вставка выполнена в виде плоских пружин, жестких в направлении перемещения.
3. Привод по п.1, отличающийся тем, что упругая вставка выполнена в виде упругих шарниров, жестких в направлении перемещения.
4. Пьезоэлектрический привод, включающий пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, отличающийся тем, что второй конец пьезоэлемента прикреплен к основанию посредством поворотного узла, выполненного с возможностью вращения опоры к фрикционной поверхности под действием сил прижима.
5. Привод по п.4, отличающийся тем, что поворотный узел выполнен в виде вставленной во втулку оси.
6. Привод по п.4, отличающийся тем, что поворотный узел выполнен в виде подшипника качения или шарнирного подшипника.
7. Пьезоэлектрический привод, включающий пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимный элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, отличающийся тем, что между пьезоэлементом и основанием расположена вставка, одной стороной прикрепленная ко второму концу пьезоэлемента, а другой к основанию, причем вставка выполнена так, что она имеет степень свободы в направлении приложения сил прижима к опоре и жестка вдоль оси перемещения, а пьезоэлемент состоит из не менее чем двух первичных пьезоэлементов, прикрепленных друг к другу одними из своих концов и расположенных по одну сторону от места их крепления, причем подключенных к источнику питания так, что при расширении прикрепленных к опоре первичных пьезоэлементов прикрепленные к вставке первичные пьезоэлементы сжимаются и наоборот.
8. Привод по п.7, отличающийся тем, что первичные пьезоэлементы выполнены в виде прямоугольных пьезопластин.
9. Привод по п.7, отличающийся тем, что первичные пьезоэлементы выполнены в виде двух вставленных друг в друга соосных пьезоцилиндров.
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| Способ приготовления пластимента для бетонов и катализатора для размола цементного клинкера | 1948 |
|
SU87043A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2190920C1 |
| Пьезоэлектрический привод | 1977 |
|
SU838733A1 |
| US 7929382 B2, 19.04.2011. | |||

