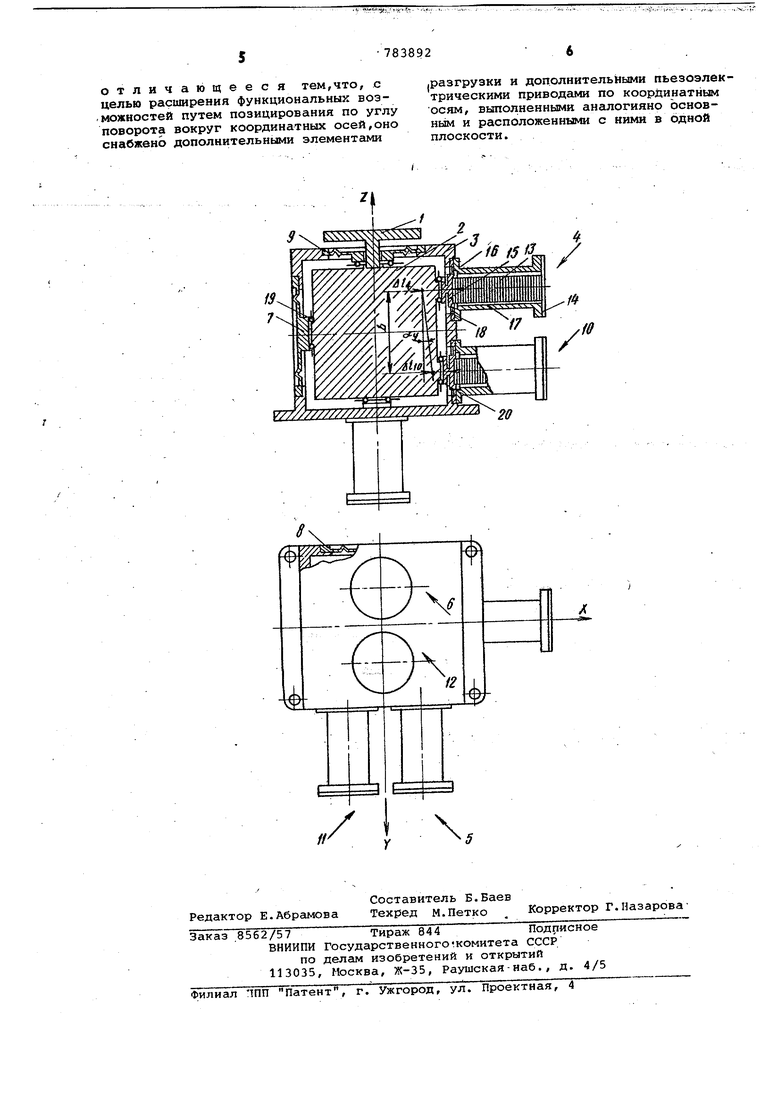
(54) УСТРОЙСТВО ДЛЯ ТОЧНОЙ УСТАНОВКИ Изобретение относится к области электротехники и автоматики и может быть использовано как исполнительное устройство в позиционных автОмйтических системах управления оптикомеханическим оборудованием, например, телескопами, спектроскопически ми анализаторами, в технологическом оборудовании микроэлектроники для рентгеновской и электронной фот литографии и является усовершен,ствованием известного устройства , В основном изобретении по авт. св. 752559 описано устройство для точной установки положения объекта. Устройство содержит корпус, коор динатный стол и пьезоэлектрические приводы по координатным осям, центральный держатель, подвижно установленный в корпусе на элементах разгрузки и поджатый к приводам силовыми мембранами, причем приводы жестко прикреплены к корпусу, силовые мембраны также прикреплены к корпусу с противоположных от приводов сторон, а координатный стол укреплен на центральном держателе. .Известное устройство не позволяе вести позиционирование по углу пово рота вокруг координатных осей, что ПОЛОЖЕНИЯ ОБЪЕКТА сужает возможности применения устройства. - - - г . . Целью изобретения является расширение функциональных возможностей за счет позиционирования по углу поворота вокруг координатных осей. Для достижения этой цели устройство для точной установки положения объекта по авт. св. 752559 снабжено дополнительными элементами разгрузки и дополнительными пьезоэлектрическими приводами по координатным осям, выполненными аналогично основным и расположенными с ними в одной плоскости. На чертеже в двух проекциях изображено устройство для точной установки положения объекта. . Устройство для точной установки положения объекта содержит координатный стол 1, жестко прикрепленный к центральному держателю 2, выполнен ному из титанового сплава, помещенному в корпус 3, выполненный также из титанового сплава. К корпусу жестч ко крепятся три взаимно перпендикулярных пьезоэлектрических привода 4,5 и 6 для позиционирования по координатам X, Y, Z, причем приводы 4 и 5 расположены параллельно плос783892
ости координатного стола. С протиоположных от приводов сторон к oprtycy жестко крепятся три силовые офрированные стальные мембраны 7, , и 9, осуществляющие постоянный рижим центрального держателя к приодам. К корпусу также жестко креятся три дополнительных привода по
координатным осям X, Y, Z 10, 11, 12. Постоянный прижим приводов 10, 11 и 12 к центральному держателю осуществляется теми же тремя силовыми гофрированньвии стальными мембранами.
Каждый привод состоит из пьеэоэлектр ческого составного толкателя 13, жестко закрепленного между основанием 14 и стальной мембраной 15 с торсионом 16, передающего перемещение толкателя через торсион центральному держателю и помещенного внутри стакана 17, выполненного из титанового сплава, жестко связанного с основанием и мембраной и жестко лрикрепленного к корпусу со стороны мембраны. Титановый сплав применяется в качеств.е основного конструкционного материала, так каК имеет близкий к пьезокерамике температурный коэффициент линейного расширения.. . - .
Подвижное соединение центрального держателя с силовыми гофрированными стальными мембранами и торсяойами приводов осуществляется с помощью элементов разгрузки, выпОлней ных, например, в виде опорных систем качения, расположенных по три по каждой координатной оси. Так, по оси X расположены опорные системы качения 18, 19 и дополнительная система качения 20. Три опорные системы качения, расположенные по одной координатной оси, осуществляю; силовое замыкание силовой гофрированной стальной мембраны, центрального держателя и приводов по этой сси и создают подвижное соединение центрального держателя с другими взаимно перпендикулярными приводами.
Устройство работает следующим образом. Для перемещения координатмо- го стола 1 вдоль оси X на пьезоэлектрические составные толкатели приводов 4 и 10 подаются напряжения в Диапазоне от О до±300 В, вызывающие равную деформацию толкателей 4и 10 (4 ) , и центральный держатель 2 с прикрепленньл к нему координатным столом 1 перемещается вдоль оси X. Направляющими являются силовая гофрированная стальная мембрана 8 торсионы приводов 5 и 11, силовая мембрана 9 - торсионы приводов б и 12. В процессе работы силовая гофрированная стальная мембрана 7 постоянно прижимает центральный держатель 2 через опорные системы качения 19, 18 и 20 к торсионам приводов 4
и 10, отслеживания перемещение пьезоэлектрических толкателей приводов 4 и 10.
Аналогичным образом происходит перемещение по осям Y и Z, отдельно по каждой оси или по всем осям одновременно.
Для перемещения координатного стола 1 вдоль оси X с одновременным поворотом вокруг оси Y на пьезоэлектрические составные толкатели приводов 4 и 10 подаются напряжения в диапазоне от Q до±300 В, вызывающие неравную деформацию толкателей приводов 4 и 10 { , и центральный дерх атель 2 с прикрепленным к нему координатным столом 1 перемещается вдоль оси X с одновременным поворотом вокруг оси Y,
Направляющими являются силовая гофрированная стальная мембрана 8 торсионы приводов 5 и 11, силовая гофрированная стальная мембрана 9 торсионы приводов б и 12. При работе изгибную деформацию имеют силовая гофрированная стальная мембрана 9 и торсионы приводов б и 12. Силовая гофрированная стальная мембрана 7 постоянно прижимает центральный держатель 2 через опорные системы, качения 19, 18 и 20 к торсионам приводов 4 и 10, отслеживания перемещение пьезоэлектрических толкателей приводов 4 и 10.
Перемещение и поворот по другим Осям происходит аналогично.
Устройство обеспечивает позиционирование по координатным осям с одновременным поворотом вокруг координатных осей при сохранении высокого быстродействия и точности позиционирования по координатным осям. Устройство по сравнению с многослойными координатными столами, применяемыми в настоящее время для совмещения и позиционирования в технологическом оборудовании микроэлектроники для электронной, рент- геновской фотолитографии, имеет вес в раз меньше, более прочную, жесткую и виброустойчивую конструкцию, обладает высоким быстродействием и точностью позиционирования.
Макет устройства для точной установки положения объекта при лабораторных испытаниях показгил следующие технические характеристики: диапазон перемещения по осям X, Y, Z -v 0-90 мкм; точность позицирования по осям-г- +0,1 мкм; диапазон углов поворота вокруг осей - X, Y, Z - 15 ; точность позиционирования по углам ставляет +1 ; полоса пропускания по любой координате - 100 Гц; нагрузочная способность - 10 кг.
Формула изобретения
Устройство для точной установки положения объекта по авт.св. 752559,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной установки положения объекта | 1978 |
|
SU752559A1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| МИКРОФОКУСНОЕ УСТРОЙСТВО РЕНТГЕНОВСКОГО КОНТРОЛЯ | 2017 |
|
RU2656872C1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ С КОМПЕНСАЦИЕЙ ТЕРМИЧЕСКОГО ДРЕЙФА ОБРАЗЦА В СИСТЕМЕ С ИОННЫМ ИЛИ ЭЛЕКТРОННЫМ ИСТОЧНИКОМ | 2008 |
|
RU2388116C1 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| Устройство для микросварки | 1990 |
|
SU1731543A1 |
| Автоматическая установка для присоединения проволочных выводов внахлестку | 1978 |
|
SU740448A1 |
| МОБИЛЬНОЕ РОБОТИЗИРОВАННОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ В АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ ХРАНЕНИЯ И ПОИСКА | 2024 |
|
RU2831700C1 |