I Изобретение относится к электрическ постоянного тока с бесконтактной комму тацией, и может быть использовано в устройстьах автоматики в тех случаях, когда предъявляются повыше гаые требования к постоянству вращающего момента яо углу поворота, и, в частности, в качестве моментного двигателя. Известен бесконтактный электроовигатель постоянного тока, в котором для управления используется эффект изменения индуктивного сопротив.леш1я фаз двигателя в функции угла поворота ротора, что позволяет обойтись без специального датчика положения ротора, как отдельного конструктивного элемента, н получит компактную конструкцию всего двигателя 1. Однако, в указанном устройстве сигкалы Датчика преобразуются в дискретную форму и использ тотся для управления транзисторным коммутатором, переключающим секции обмоток, что допуотимо лишь в случаях, когда неизбежно возникающие пульсации мсшетп носущественны, например, в вентильных двигателях. В тех случаях, когда предъявляются повышегтаые требования к постоянству вращающего мохгента по углу поворота, и, в частности, для моментных двигателей, в качестве датчика положеняя ротора иопользуют сннусно-косинусные трансформаторы. Известен также бесконтактный электродвигатель, в котором, с целью снижения габаритов, вторичные обмотки тряноформаторного датчика совмещены с силовыми обмотками двигателя, а обмотки возбуждения датчика и двигателя располагаются на магнитопроводе ротора со сдвигом 90 эл.град. 2. Однако, такой двигатель совмещенной конструкции требует сложной схемы фильтров и Наличия двух обмоток возбуждения на роторе, питание к которым должно ггодиодиться через контактный кольца, что
усложняет конструкцию- авигатепя я существенно снижает прерл ущсства, полученные за счет совмеитенич обмоток статора.
Наиболее близким по технической сущности к, предлагаемому пагшется бесконтактный электродвигатель постоянного токе, содержащий синхронную машину, якорная обмотка которой через вентили подключена ко вторичной обмотке трансформаторного датчика положения ротора. Вторичная обмотка датчика связана с неподвижной первичной обмоткой посредством короткозамкнутой секции, установленной на роторе. Кроме того, вторичная обмотки датчика выполнена с числом пар полюсов вдвое меньшим, чем у якорной обмотки синхронной машины, и обе обмотки размещены в общем магнитопровоае, а кброткозамкнугая секция на роторе Охватывает ивойное полюсное деление ротора З}.
Однако, в таком двигателе не обеспечивается постоянство вращающего момента по углу поворота ротора, а конструктивно двигатепь успожнен наличием первичной обмотки датчика положена, выполненной в виде кольцевой катушки, расположенной соосно с ротором, что приводит к росту габаритов двигателя.
Цель изобретения - обеспечение постоянства вращающего момента по углу поворота ротора и снижение габаритов овигателя.
Поставленная цепь достигается тем, что датчик положения имеет две обмотки, сйвинутые по отношению друг к другу на ) 90 эл.град., выполненные с синусно-раопределенными витками и полключенные к источнику переменного тока каждая из обмоток уложена в одйом из секторов двигатепя вместе с силовыми . обмотками с шагом, вдвое превышающим шаг силовых- обмоток, где П - любое целое число.
Кроме того,; с. целью упрощения схемы преобразования сигнапов датчика, оси обеих обмоток датчика смещены относительно осей силовых обмоток на 45 вл.град.
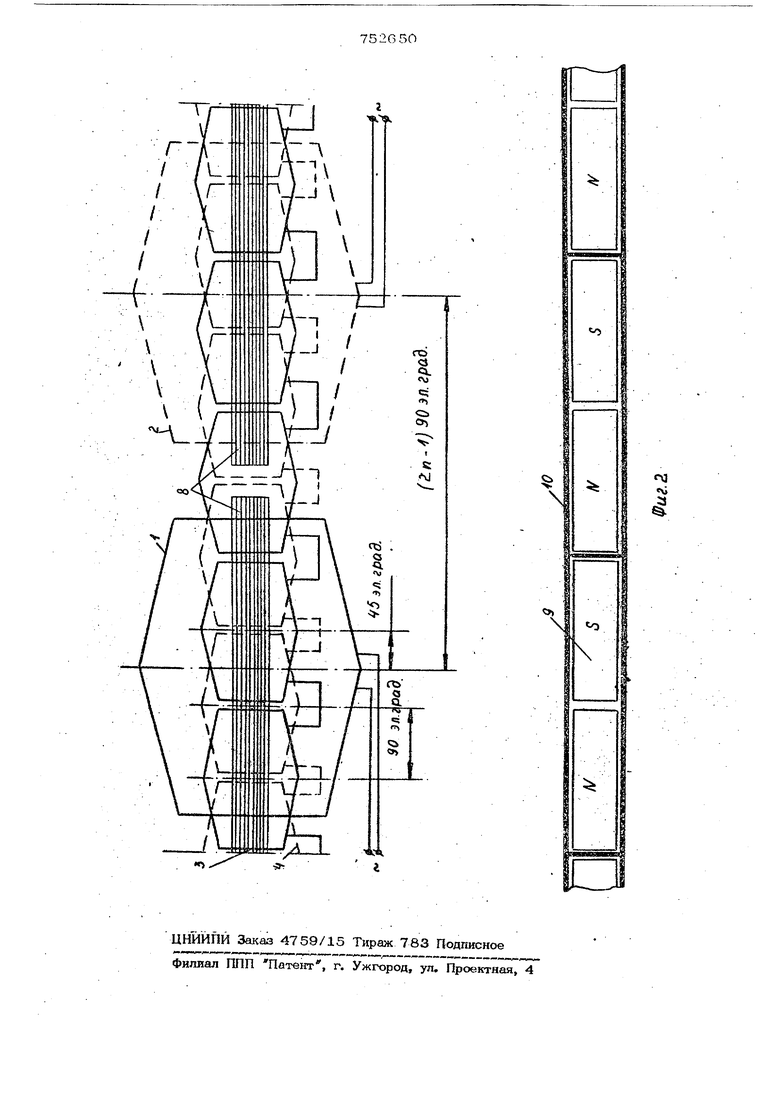
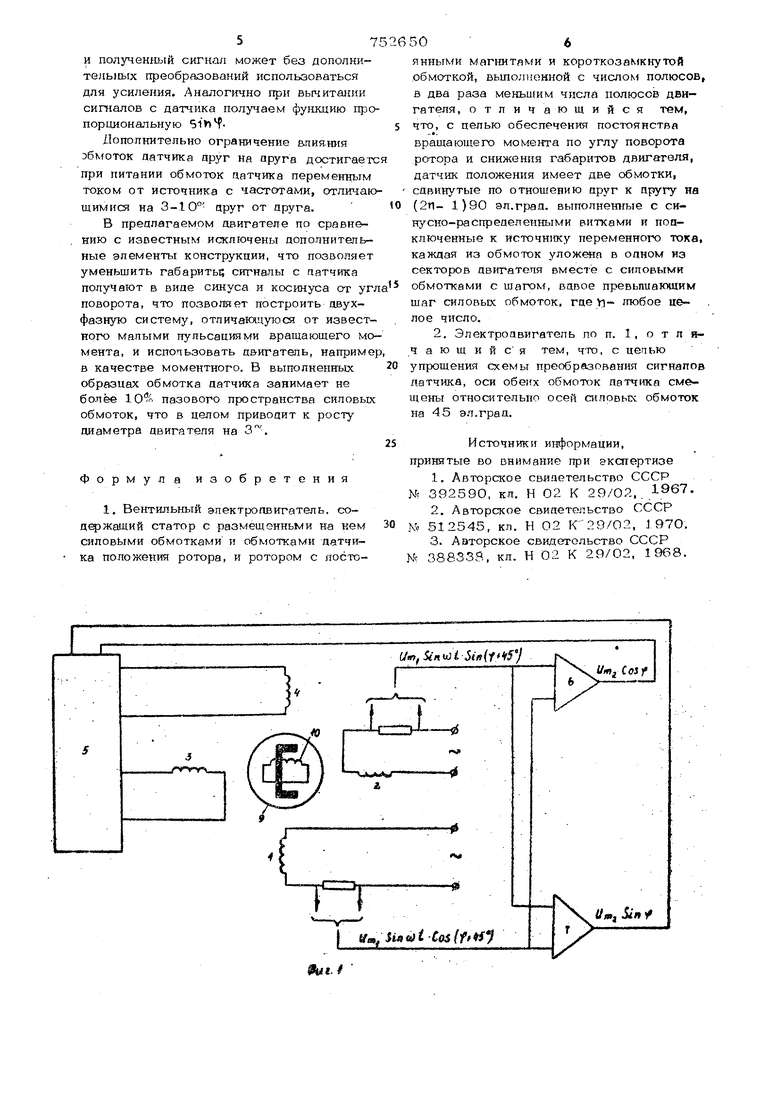
На фиг. 1 изображена эпистрическая схема двигатепя с преобразующими уст ройствами; на фиг. 2 - развертка активной части двигателя.
Обмотки 1 и 2 датчика подключетшт к источнику переменного напряжения. Силовые обмотки (обмотки якоря) 3 и 4 двигателя питаются через усилитель 5,
упра&пяющие сигнапы на который поступают с суммирующих устройств 6 и 7, преобразующих сигналы датчика.. На магнитопррводах статора 8 расположены
силовые обмотки 3 и 4 и уложенные вместе с ними обмотки 1 и 2 датчика. а роторе 9 с постоянными магнитами становлена короткозамкнутая обмотка 10 с витками, охватывающими по два
полюса. Оси обмоток датчика смещены друг относительно друга на угол (2h-l) 90 эл. град, выполнены с синусно-распределенными витками и шагом, вдвое больше шага силовых обмоток, благодаря чему
магнитная связь между обмотками датчика и силовыми обмотками отсутствует (синусное распределение витков не показано). Каждая из двух об моток датчика расположена на отдельном секторе магнитопровода 8.
Электродвигатель работает спедующим образом.
К обмоткам 1 и 2 датчика подводится переменное напряжение. При повороте
ротора 9 ток в обмотках изменяется вследствие изменения магнитной связи обмоток датчика с короткозамкнутой обмоткой 1О ротора. Синусное распределение витков обмоток позволяет получить
модуляцию тока в них по законам и COS (где Ч- угол поворота в эл. град) с посгоянной составляющей. В суммирующих устройствах 6 и 7 выделяются огибающие, которые усиливаются усилителем 5 и используются для питания силовых обмоток 3 и 4 двигателя.
Магнитная связь между обмотками 1 и 2 датчика исключается разделением магнитопровода на две самостоятельные,
магнитно не связанные части, в виде двух секторов магнитопровода с общим ротором, на каждом из которых располагается по одной обмотке датчика, или в виде овух самостоятельных дв.игателей с
одной из обмоток Датчика на каждом. В любом случае ориентировка обмоток дат чика относительно силовых обмоток должна обеспечить их взаимный сдвиг, эквивалентный сдвигу в пространстве на 90
эл. град.
Для упрощения схемы обработки сигналов с Датчика в сумматорах 6 и 7, где огибающая выделяется путем сложения и вычитания сигналов с обмоток датник а оси обмоток датчика смещены относительно силовых обмоток на 45 эл. град. этом суммирование дает
Sih()ц.cos(Ч445°) -лГзcosf
и полученный сигнал может без дополнительных преобразований использоваться для усиления. Аналогично при вычитш{ии сигаалов с датчика получаем функцию щзопорционачьную 51Ъ 11ополнительно ограничение в,лия.ния эбмоток датчика друг на аруга достигаетс при питании обмоток датчика переменным током от источника с частотами, отличак щимися на 3-10° друг от аруга.
В преалагаемом двигателе по сравнению с известным исключены дополнительные элементы конструкции, что позволяет уменьшить габариты; сигналы с датчика получают в виде синуса и косинуса от уг поворота, что позволяет построить двухфазную систему, отличающуюся от извест ного Малыми пульсапиями вращающего м мента, и использовать двигатель, наприм в качестве моментного. В выполненных образцах обмотка датчика занимает не более Ю пазового пространства силовы обмоток, что в целом приводит к росту диаметра двигателя на 3™. Формула изобретения 1, Вентильный электродвигатель, сод жащий статор с размещенньыи на нем силовыми обмотками и обмотками датчика положения ротора, и ротором с постоянными магнитами и короткозамкнутой обмоткой, вьшолиенной с числом полюсов, в два раза меньишм числа полюсов двигателя, отличающийся тем, что, с пелью обеспечения постоянства вращающего момента по углу поворота ротора и снижения габаритов двигателя, датчик положения имеет две обмотки, сдвинутые по отношению цруг к пругу на (2ti- 1)90 эл.град. выполненные с синусно-распрепелешагми витками и подключенные к источн жу переменного тока, каждая из обмоток уложена в одном из секторов дв1п ателя вместе с силовыми обмотками с шагом, вавое превышающим шаг силовых обмоток, гае тобое целое число. 2. Электроавигатель по п. 1, о т п ич а ю щ и и с я тем, что, с цепью упрощения схемы преобразования сигналов датчика, оси обеих обмотс ж датчика смещены относительно осей силовых обмоток на 45 эл.град. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 392590, кл. Н 02 К 29/02,. 1967. 2.Авторское свидетельство СССР к 512545, кл. Н 02 1Г 29/02, 1970. 3.Ааторское свидетельство СССР 38833,, кл. Н 02 К 29/02, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ьесконтактный датчик углового положения | 1977 |
|
SU641481A1 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1996 |
|
RU2126196C1 |
| Вентильный электродвигатель | 1984 |
|
SU1328889A2 |
| ОДНОФАЗНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1998 |
|
RU2152119C1 |
| Устройство для контроля обмоток электрических машин | 1982 |
|
SU1114989A1 |
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1978 |
|
SU743127A1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1999 |
|
RU2159495C1 |
| Бесколлекторный электродвигатель совмещенной конструкции | 1970 |
|
SU512545A1 |