(54) ЦИФРОВОЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Цифровой позиционный электропривод | 1984 |
|
SU1239821A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Позиционный электропривод с инди-КАциЕй пЕРЕМЕщЕНия МЕХАНизМА | 1979 |
|
SU809051A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| Цифровой позиционный электропривод | 1985 |
|
SU1379928A2 |
| Электропривод постоянного тока | 1986 |
|
SU1365325A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1980 |
|
SU960735A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
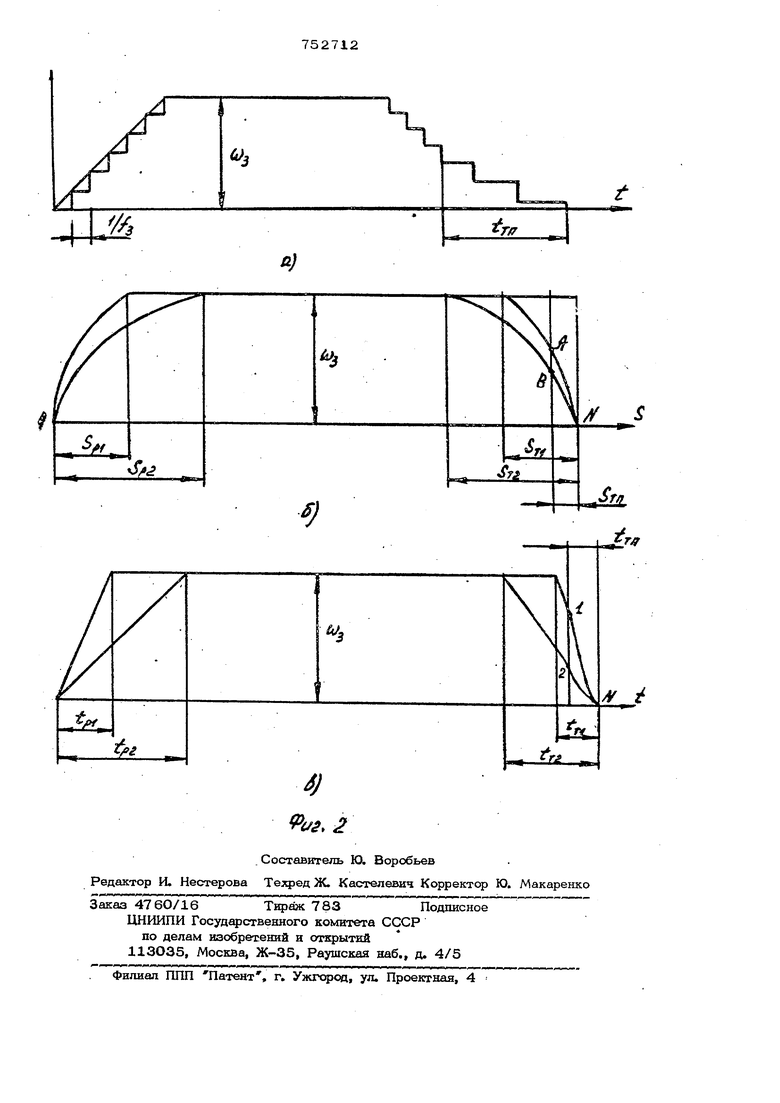
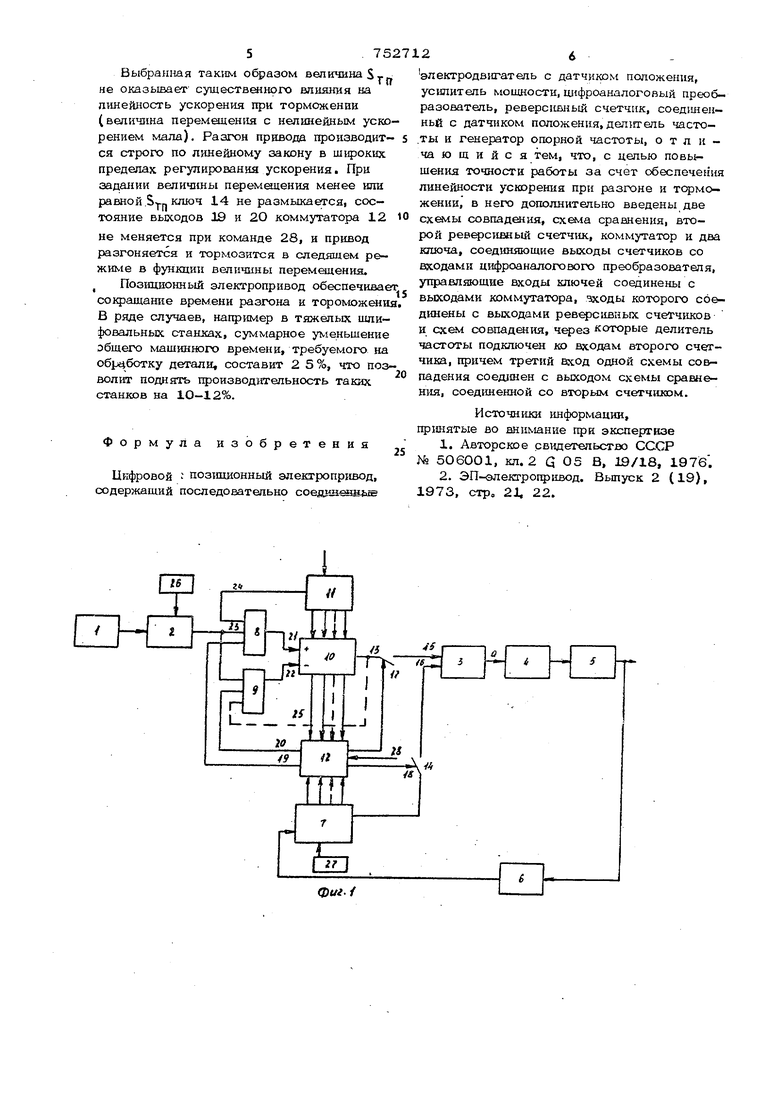
Изобретение относится к эле1сгропрцводу, в частности , к системам автоматического электропривода с регулированием уск рения скорости и величины перемецения и может найти применение для автоматизации металлорежущих станков, прокатных станов, лифтов и других механизмов. Известен дифровый электропривод станка, содержащий последовательно соединен ные электродвигатель, усилитель мощности цифроаналоговый преобразователь, реверсивный счетчик, делитель частоты и генератор опорной частоты l. Наиболее близким по технической сущности является устройство, содержащее последовательно соединенные электродвигатель с датчиком положения, усилитель мощности, цифроаналоговый преобразо тель реверсивный счетчик, соединенный с датчиком положения, делтгель частоты к генератор опорной частоты 21. Недостатком данных уСтройств 5шляется то, что они не обеспечивают регулирование ускорений при разгоне и торможешги, что снижает точность работы электропривода. Цель изобретения - повышение точности работы за счет обеспечения линейности ускорения при разгоне и торможении. Указанная цель дост13: ает-ся тем, что в электропривод допо: -Л-е.1Ьно введены две схемы совпадения, схема сравнения, второй реверс1шный счетч 1К, коммутатор и два ключа, соеднн55ощие выходы счетчиков со входами Д11фроаналогового преобразователя, управляющие ачоды ключей соединены со ачодами коммтоатора, ачоды которого соед1яены с выходами реверсивных счетчиков 11 схем совпадения, через которые делитель частоты подключен ко входам второго счетчш;а, причем третий Вход одной схемы совпадения соединен с выходом схемы сравненля, соединенной со зторьш счетчшсомо На фиг. 1 пр1шедена ф Иыиюнальная схема устройства; на фиг, 2 - графики зависимости скорости от времени и перемещения. 752 Цифровой пЬзшлюнньй электропривод (фиг. 1) содержит последовательно соединенные генератор 1 и делитель 2 частоты, входной преобразователь 3, усилитель мощности 4, электродвигато1Ь 5, датчик 6 положения, первый реверсивный счетчик 7, схемы 8 и 9 совпадения, второй реверсивный счетчик 1О, схему 11 сравнения, коммутатор 12, ключи 13 и 14, один из которых соед1шяет вькод счетчика 10 с первым входом 15 входного преобразователя 3, а второй - выход счетчика 7 со втсфым входом 16 входного преобразователя 3, управляющие входы 17 и 18 ключей. 13 и 14 подключены к первому и второму выходам коммутатора 12, управляющие Входы которого подключены к выходам счетчиков 7 и 10, а третий 19 и четвертый 20 его выходы соединены со входами схем 8 и 9 совпадения, через которые делитель 2 частоты подключен к суммирующему 21 и вычитающему 22 входам счетчика 1О, причем третий вход 23 схемы 8 совпадения, соединен с выходом 24 схемы 11 сравнения, соединенной со счетчиком 10. Устройство работаем следующим образом. В исходном состоянии ключ 13 разрмЮ1ут, ключ 14 замкнут и датчик 6 положения через счетчик 7 подключен на вход 16 входного преобразователя 3. Выбором коэфф1щиента усиления входного преобразователя 3 обеспечивается устойчивость замкнутого привода, счетчик 7 вместе с входным преобразователем 3 вьпопняют роль реверсивного дискретного нуль-органа. При этом, если вход усилителя 4 мощности аналоговый, то входной преобразователь 3 является цифроаналоговым преоб разователем. В случае дискре-гного (цифро вого) входа усилителя 4 мощности входной преобразователь 3 может быть пред- стаапен в виде цифрового широтно-импуяьс ного модулятора или масщтабного преобразователя кода счетчика 7 с коэффициентом Is , как правило, менее единицы. На выходе 19 коммутатора 12 обеспечивается ноль и схема 8 совпадения остается закрытой, на его выходе 2О - единица, но блокирующая связь 25 также обеспечивает закрытое состояние схемы 9 совпадения, так как на выходе счетчика 10 - ноль . Блоком 26 задается требуемое ускорен при разгоне и торможении Olj( при атом всегда обеспечивается их равенство О р-О 24 циент деления частоты генератора ll tjV/ 2 Д® l. -коэффициент д&ления де лителя 2). Блоком 26 задания устанавливает ся требуемая скорость перемещения Lu. Данньй блок представляет собой набор кодовых переключателей , выходы которых подключены ко входам схемы 11 сравнения, блоком 27, так же представляющим собой набор кодовьк переключателей, устанавливается знак (направление) и велич)ша требуемого перемещения. При подаче команды Пуск на вход 28 коммутатора 12, последний размыкает ключ 14, замыкает ключ 13, на его выходе 19 появляется ед1шкца, а на выхопь. Схема 8 совпадения отде 20 - но в счетчик 10 поступают им- крываетсЯуИ пульсы частотой fa, (фиг. 2а). Код счетчика возр)астает, пр}1вод разгоняется по ли- нейному закону (фиг. 2в),, например с ускорением а. , которому соответстсвует время разгона Ьр При коде счетчика 10, равном коду, установленному блоком 26 задания, на выходе 24 схемы 11 сравнения появляется ноль закрывающий схему 8 совпадения. Привод работает с постоянной скоростью tUj . Одновременно с датчиком 6 положения поступают импульсы на вход счетчика 7 и записанный в нем блоком 2 7 код уменьшается. При равенстве кода счетчика 7 коду счетчику 10 на выходе 19 коммутатора 12 появляется ноль,а на его вь ходе 20 - единица. Схема 9 совпадения открывается, и счетчик 1О переходит в режим вычитания. Код счетчика 10 уменьщается. На выходе 2 4 схемы 11 сравнения появляется- единицд но схема 8 совпадения остается закрытой, так как на выходе 13 коммутатора 12 обеспечивается ноль. При умеяьШеН1щ кода счетчика 1О до велич:1НЫ, соответствующей мен ее .„,, где данного привода величина перемещения (точки А и В, фиг. 26, в,), ключ 13 размыкается , а ключ 14 замыкается, и привод тормозится в следящем режиме с переменным ускорением (фиг. 26). Велич1ша5 выбирается из условия чувствительности привода и обеспечения апериодического переходного процесса при торможении с максимальньм ускорением Qj,, и , как правотА в приводах с добротностью по скорости 15-20 .i/C не превосходит ( 5-10)оборота вала Выбрашгая таким образом величина 3,не оказывает существенного влияния иа линейность ускорения при торможении (величина перемещения с нелинейным уско рением мала), Разгон привода производится строго по линейному закону в широких пределах регулирования ускорения. При величины перемещения менее или раш1Ой. ключ 14 не размыкается, состояние выходов 19 и 2О коммутатора 12 не меняется при команде 28, и привод разгоняется и тормозится в следящем режиме в функции величины перемещения. Позиционный электропривод обеспечивае сокращание времени разгона и тороможени В ряде случаев, например в тяжелых шлифовальных станках, суммарное уменьшение общего машинного времени, требуемого на обработку детали, составит 25%, что поз волит поднять производ1Етельность таких станков на Ю-12%. Формула изобретения Цифровой ПО31ПШОННЫЙ электропривод, содержащий последовательно соеднненш1 е электродвигатель с датчиком положения, усилитель мощности, Щ1фроаналоговый преобразователь, реверсивный счетчик, ньй с датчиком положения, дел1ггель часто.ты и генератор опорной частоты, о т л ча ю щ и и с я тем, что, с целью повышения точности работы за счет обеспечения линейности ускорения при разгоне и торможении, в него дополнительно введены две схемы совпадения, сравнения, второй реверсивный счетчик, коммутатор и два ключа, соединяющие выходы счетчиков со входами цифроаналогового преобразователя, управляющие входы ключей соединены с выходами коммутатора, входы которого соединены с выходами реверсивных счетчиков и схем совпадения, которые делитель частоты подключен ко входам второго счетчика, причем третий вход одной схемы совпадения соед}шен с выходом схемы сравнеН}Ш, соединенной со вторым счетчииом. Источники информации, пр1шятые во внимание при экспертизе 1.Авторское свидетельство СССР № 506001, кл. 2 G 05 В, 19/18, 197б. 2.ЗП-элекгропривод, Вьшуск 2 (19), 1973, стр, 21, 22.
