УСТРОЙСТВО для ПРОГРАЛ МЫОГО
(54) УПРАВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой позиционный электропривод | 1978 |
|
SU752712A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Позиционный электропривод с инди-КАциЕй пЕРЕМЕщЕНия МЕХАНизМА | 1979 |
|
SU809051A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Позиционный привод с цифровым управлением | 1976 |
|
SU624205A1 |
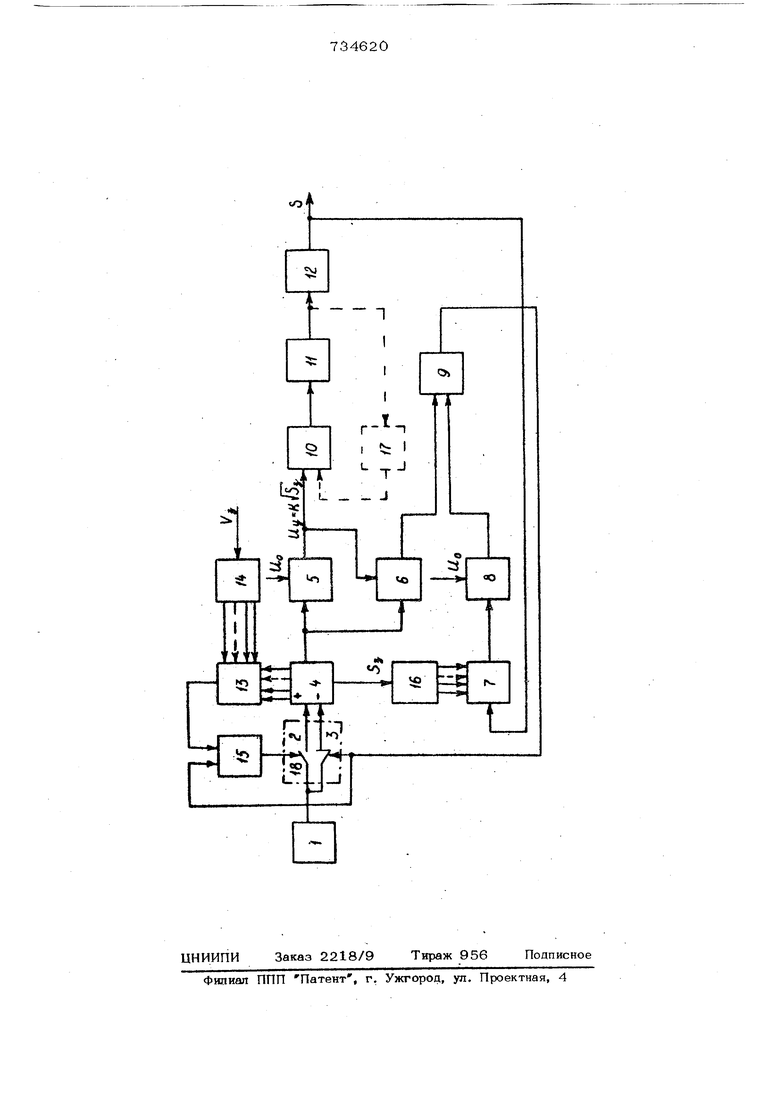
Изобретение относится к автоматизированнсму электретриводу и может быть использовано, например, в металлорежущих станках. Известен позиционный электропривод, в котором с целью точного выхода на позицию при минимальном времени торможения сигнал управления приводе формируется параболической зависимости от. пути, обеспечивающей тopvfoжeниe с постоянным темпом замедления. Электропривод содержит устройство задания положения механизма и сравнения, формирователь задатчик скорости, усилитель мощности, двигатель, датчики скорости и положения. Постоянство ускорения при торможении обеспечивается формирователем, выполненным на базе операционного усилителя с нелинейной обратной связью по его выхо{ ному напряжению, а значение скорости перемещения - диодным или транзисторным ограничителем на выходе формирователя р. . Данное рещение обеспечения парабол чесйой зависимости обладает существенныМИ недостатками; неточностью, особенно при малых уровнях сигналов управления, нелинейности характеристик составляющих элементов и самого способа аппроксимации; нестабильностью температзрной и из-за колебан1ш питающих напряжений малой разрешающей способностью .Задание скорости с помощью диодного или транзисторного ограничения имеет невысокий диапазон из-за прямого падения напряжения диода или открытом транзисторе и на контакте движка потендиo eтpa или переключателя. Наиболее близким к изобретению по технической сущности является устройство для программного управления, содержащее двигатель, позицисжный датчик, индикацию счетчика, числовые декады, блок задания программы, основной блок устройства позиционирования, блок ручного управления, внутренний блок управления процессом, блок задания скорости, генератор импульсов, блок управления заданием, звено согласования, дифференциальный счетчик, цифроаналоговый преобразователь, усилители управления и мсяцности 2. Э устройство обладает существенной сложностью из-за необходаьч-гости программирования участков разгона и торможения и его применение в гфостых позиционных системах нецелесообразно. Цель изобретения - расширение функциональных возможностей устройства за счет , обеспечения постоянного ускорения 1фи , торможении независимо от заданных пути и скорости перемецения и за счет обеспечения в широких пределах гадания скороети перемещения, независимой от пути и ускорения перемещения. Поставленная цель достигается тем, что устройство для программного управления, содержащее блок задания скорости и последовательно соединенные генератор импульссш, блок ключевых элементов, первый реверсивный счетчик, первый цифреаналоговый преобразователь, усилитель, электродвигатель, датчик перемещения исполнительного сагана, второй реверсивный счетчик, вторые входы которого подключены к выходам блока задания программ, и втсрой цифроаналоговый преобразователь, содержит блок сравнения и последовательно соединенные третий цифроаиалоговый преобразователь, нуль-орган и элемент И, щэугой вход которого соединен с БЬ ходом блока срашгения, подключенного первыми входами к выходам блок задания скорости, вторыми входами - к другим выходам первого реверсивного счетчика, второй вход блока ключевых элементов соедашен с выходом элемента И, третий нх.од с выходсм нуль-органа, другой вход ксторого подключен к выходу цифроанало roBoix преобразователя, а первый и вто- рой входы третьего цифроаналогового преобразователя соединены соответственно с выходом первого реверсивного счетчика и с выходом первого цифроаналогового преобразователя. На чертеже приведена блок-схема npej лагаемого устройства. Устройство содержит генератор 1 импульсов, ключевые элементы 2 иЗ, первый - реверсивный счетчик 4, первый 5 и третий 6 ци45)оаналоговые преобразователи, второй реверсивный, счетчик 7, второй ци роаналоговый преобризователь 8, нульорган 9, усилитель 1О, электродвигатель 11, датчик 12 перемещения исполнительноге органа, блок 13 сравнения, блок 14 задания скорости, элемент 15 И, блок 16 задания программы, тахогенератор 17 и 6.ЛОК 18 ключевых элементов. Устройство работает следующим образом. При занесении в счетчик 7 через блок 16 кода величш№1 перемещения на выходе преобразователя 8 появляется сигнал, переключающий нуль -орган 9 в положение, при котором элемент 2 замкнут, а эле,мент 3 разомкнут. Импульсы с генератора 1 поступают на суммирующий вход счетчика 4. При увеличении кода в этом счетчике сигнал на выходе преобразова еля 6 возрастает и при превышении им сигнала с преобразователя 8 нуль-орган переключателя, размыкает элемент 2 и замыкает элемент 3. Счетчик 4 переходит в режим вычитания. Таким образом, нуль-орган 9, переключая элементы 2 и 3, стремится сохранить равенство сигналов на своих входах, , Ug - выходные напряжения со.ртветственно преобразователей 6 и 8; UQ - напряжение питания резисторного делителя преобразователя 8; Ац- код счетчика 7, равный ве- личине перемещения. Преобразователи 5, 6 и 8 построены так, что их выходные напряжения пропорциональны произведению напряжения питания резисторного делителя на параллельный код соответствующих счетчиков 4 и 7, управляющих ключами этих преобразователей, Выходное напряжение преобразователя 6 равно произведению кода счетчика 4 на выходное напряжение преобразователя 5, которое раы1о: U , т,е. lJb-- 3 5N-- 3 zJo vПодставив (2) в (1) получаем: . V А -К Таким обраг ,М, код счетчика 4 пропорционален корню квадратному из кода счетчика 7, выходное напряжение преобрааовате.пя 5, являющееся сигналом управления электродвигателя 11, пропсршкжально корню кващ)атному из величины перемещения. Под воздействием этого напряж&ния и« электродвигатель 11 приходит в движение. Импульсы с датчика 12 вычитаются из установленного в счетчике 7 ко да величш1ы перемещения, последний умень шается и электродвигатель 11 отрабатъг- веет эту величину перемещения с постоянным темпом замедления в соответствии с законом управления .(5). В позиционных приводах требуется обеспечить отработку заданной величины перемещения на заданной скорости. В данном устройстве это осуществляется за счет блока 14, блока 13 сравнения и эле мента 15. Блок 13 работает так, что на его выходе всегда обеспечивается логическая при коде счетчика 4 меньшем кода заданной скорости з устанавливае- is мого с помощью блока 14, При сравне- ; НИИ этих кодов на выходе блока 13 появляется логический О, который блокирует элемент 15 И, и элемент 2 разомкнут несмотря на то, что сигнал с выхода преобразователя 8 больше сигнала с вы хода преобразователя 6, Код в счетчике 4 не меняется, оставаясь равным коду заданной скорости. По мере отработки заданной величины перемещения сигнал с преобразоватегш 8 уменьшается и при Ij, идНул1 орган 9 переключается и замыкает элемент 3. Код счетчика 4 уменьшается, а электродвигатель 11 тормозирся с заданным законом (5). Предлагаемое устройство применяется при разработке автономных следящ11х элек троприводов для станков с числовым программным управлением. Его использование позволяет простыми средствами реализовать оптимальный закон регулирования в позиционных следящих системах и повысит точность и производительность обработки. При использовании данного решения, например, Б сверлильных станках при изготовлении печатных плат производительность при перемещениях до 1-2 мм повышается на ЗО%. Формула изобретения Устройство для программного управле- , ния, содержащее блок задания скорости и последовательно соединенные генератор импульсов, блок ключевых элементов, первый ре 5ерсивный счетчик, первый цифроаналоговый преобразователь, усилитель, электродвигатель, датчик перемещения исполнительного органа, второй реверсивный счетчик, ВТОРЬЮ входы которого подключены к Bbfходам блока задания программы, и второй цифроаналоговый преобразователь, отличающееся тем, что, с целью расширения функциональных возможностей ус-рройства, оно содержит блок сравнения и последовательно соединенные третий цифроаналоговый преобразователь, нуль-орган и элемент И, другой аход которого coeasfнен с выходсм бловса сравнения, подключенного первыми входами к выходам блока задания скс ххзти, вторыми входами - к другим выходам первого реверсивного счет чика, второй вход блока ключевых элементов соединен с выходом элемента И, третий вход - с выходом нуль-органа, другой вход, которого подключен к выходу второго ци4роаналогового преобразователя, а первый и второй входы третьего цифроаналогового преобразователя соединены соответственно с выходе первого реверсивного счетчика и с выходом первого цифроаналогового преобразователя. Источники информации, принятые во внимание при экспертизе 1.Бай Р, О, в Щ). Управление следящими электрсприводами с применением цифровых устройств. М,, 1ергия,1968. 2,Труды ВИНИТИ, серия Автоматизнрованный электротхривод. Электротехнология, электроснабжение, силовая преобразовательная техника 1975, № 31, с,2228 {прототип).
ьО
