11239821
Изобретение относится к электроехнике и может быть использовано электроприводах, осуществляющих озиционирование различных объектов.
Целью изобретения является повы- 5 ение точности и быстродействия. На чертеже представлена схема лектропривода.
Цифровой позиционный электроприод содержит электродвигатель 1 по- 1C тоянного тока, последовательно соеиненные первый реверсивный счетчик 2, ходной преобразователь 3 и усилитель 4 мощности, выход которогоподключен к якорной обмотке электродвига- is еля 1, первую 5 и вторую 6Ч:хемы совпадения, управляющие входы 7 и 8 которых соединены с управляющими выходами 9 и 10 коммутатора 11, а-выходы подключены к суммирующему и вычитающему 20 входам первого реверсивного счетчика 2 соответственно, информациойные входы 12 и 13 первой 5 и второй 6 схем совпадения подключены к выходу делителя 14 частоты, вход которого под- 25 ключей к генератору 15 опорной частоты, управляющий вход делителя 14 частоты подключен к блоку 16 зада-, ния кода скорости, второй реверсивный счетчик 17, информационные входы ко- 30 торого подключены к выходу блока 18 задания кода перемещения, а выходы - к информационным входам коммутатора 11, датчик 19 положения нагрузки, вход которого соединен с электродвигателем 1, а выход - с вторыми информационными входами второго реверсивногхз счетчика 17.
35
во ра зу ст ет 14 сч то со вы си кр уп ра ур вп по ра со ни оч ющ чи де сч об уп те вк ко сч св и ту э сч т п л л
Кроме того, электропривод содержит третью 20 и четвертую 21 схемы совпадения, управляющие входы которых соединены с управляющими входами 8 и 7 второй 6 и первой 5 схем совпадения соответственно, информационные входы с выходом датчика 19 положения нагрузки, а выходы - с суммирующим и вычитающим входами первого реверсивного счетчика 2, третий управляющий выход 22 коммутатора 7 соединен с дополнительными управляющими входами 23 и 24 первой 5 и второй 6 схем совпадения, а выход второго реверсивного счетчика 17 соединен с входом блока 16 задания кода скорости.
Электропривод работает следующим образом.
Блок 18 задания кода перемещения записывает код перемещения и знака
s 0 5 0
5
0
5
во второй реверсивный счетчик 17. Код рассогласования счетчика 17 преобразуется блоком 16 задания кода скорости в код скорости, которьш управляет коэффициентом деления делителя 14 частоты,. Кроме того, реверсивный счетчик 17 управляет работой коммутатора 11. При появлении кода рассогласования на счетчике 17 на управляющем выходе 10 коммутатора 11,появляется сигнал низкого уровня, который закроет схемы 6 и 20 совпадения, а на управляющих выходах 9 и 22 коммутатора 11 появляются сигналы высокого уровня, открывающие схемы 5 и 21 совпадения. При отработке заданного положительного перемещения с генератора 15 опорной частоты с частотой, соответствующей коду блока 16 задания кода скорости, который, в свою очередь управляется кодом счетчика 17, импульсы поступают на суммирующий вход первого реверсивного счетчика 2 через открытую схему 5 совпав дения и дополняют счетчик 2. Код счетчика 2 поступает на входной преобразователь 3, преобразуется им в управляющий аналоговьй .код усили- . теля 4 мощности, на выход которого включен электродвигатель 1 с датчиком положения 19, которьй вместе со счетчиком 17 .образует контур обратной связи по положению, а со схемами 20 и 21 совпадения и счетчиком 2 - контур обратной связи по скорости. При этом на выходе первого реверсивного счетчика 2 присутствует код, пропорциональный интегралу разности частот делителя 14 частоты .и датчика 19 положения. Данный код является управляющим для входного преобразовате- , ля 3.
При входе привода в зону торможения код реверсивного счетчика 17
уменьшается, что приводит к уменьшению частоты импульсов, проходящих на суммирующий вход первого реверсивного счетчика 2 с делителя 14 частоты, что приводит к уменьшению
кода счетчика 2,
При входе привода в зону согласованного положения, которой соответствует по.пное обнуление второго реверсивного счетчика 17, на управляю5- щем выходе 22 коммутатора 11 появляется сигнал низкого уровня, который, закрывая схему 5 совпадения, прекращает поступление импульсов с делителя 14 частоты на суммирующий вход второго счетчика 2. Привод останавливается, в зоне согласованного положения, при этом счетчик 2 имеет на выходе код, пропорциональный моменту нгрузки на валу электродвигателя 1.
При выходе электропривода из зоны позиционирования, например При наличии возмущающих активных моментов, ; происходит изменение кодов счетчиков 17 и 2. Появление кода, отличного от нуля, на выходе счетчика 17 вызывает на управляющих выходах 10 и 22 коммутатора 11 сигналы высокого уровня, открывающие схемы 6 и 20 совпадения, а на выходе 9 - сигнал риз- кого уровня, эакрьгоающей схемы 5 и 21 совпадения.
Далее блок 16 задания кода скоро- сти вырабатывает код управления делителем 14 частоты, соответствующий требуемому перемещению, соответствующая частота импульсов с делителя 14 частоты проходит через открытую схему 6 совпадения на вычитающий вход счетчика 2, а обратная связь по скорости с датчика 19 положения заводится через открытую схему 20 совпадения на суммирующий вход счетчика 2, в результате происходит возврат привода в зону согласованного положения.
Формула изобретения
Цифровой позиционный электропривод, содержащий электродвигатель постоянного тока, последовательно соединенные первый реверсивный счетчик, входной преобразователь и усилитель мощности, выход которого подключен к якорной обмотке электродвигателя, первая и вторая схемы совпадения.
Редактор А. Шандор
Составитель М. Кряхтунова
Техред 0.СопкеКорректор О. Луговая
Заказ 3406/55 . Тираж 631
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
10
15
20
5
0
5
0
одни из управляющих входов которых соединены с управляющими выходами коммутатора, а выходы .подключены к суммирующему и вычитающему входам первого реверсивного счетчика соответственно, причём информационные входы первой и второй схем совпадения подключены к выходу делителя частоты, вход которого подключен к генератору опорной частоты, а управ- .ляющий вход делителя частоты подключен к блоку задания кода скорости, второй реверсивный счетчик, первые инфо15Ыационные входы которого подключены к выходу блока задания кода перемещения, а выходы - к информационным входам коммутатора, датчик положения нагрузки, вход которого соединен с электродвигателем, а выход - с вторыми информационными входами второго реверсивного счетчика, отличающийся тем, что, с целью повышения точности и быстродействия, в него введены третья и чет вертая схемы совпадения, коммутатор снабжен дополнительным управляющим выходом, а первая и вторая схемы совпадения выполнены с дополнительными управляющими входами, причем управляющие входы третьей и четвертой схем совпадения соединены с управляющими входами второй и первой схем совпадения соответственно, информационные входы - с выходом датчика положения нагрузки, а выходы - . с суммирующим и вычитающим входами первого реверсивного счетчика, дополнительный управляющий выход коммутатора соединен с.дополнительньми управляющими входами первой и второй схем совпадения, а выход второго реверсивного счетчика соединен с входом блока задания кода скорости.
Подписное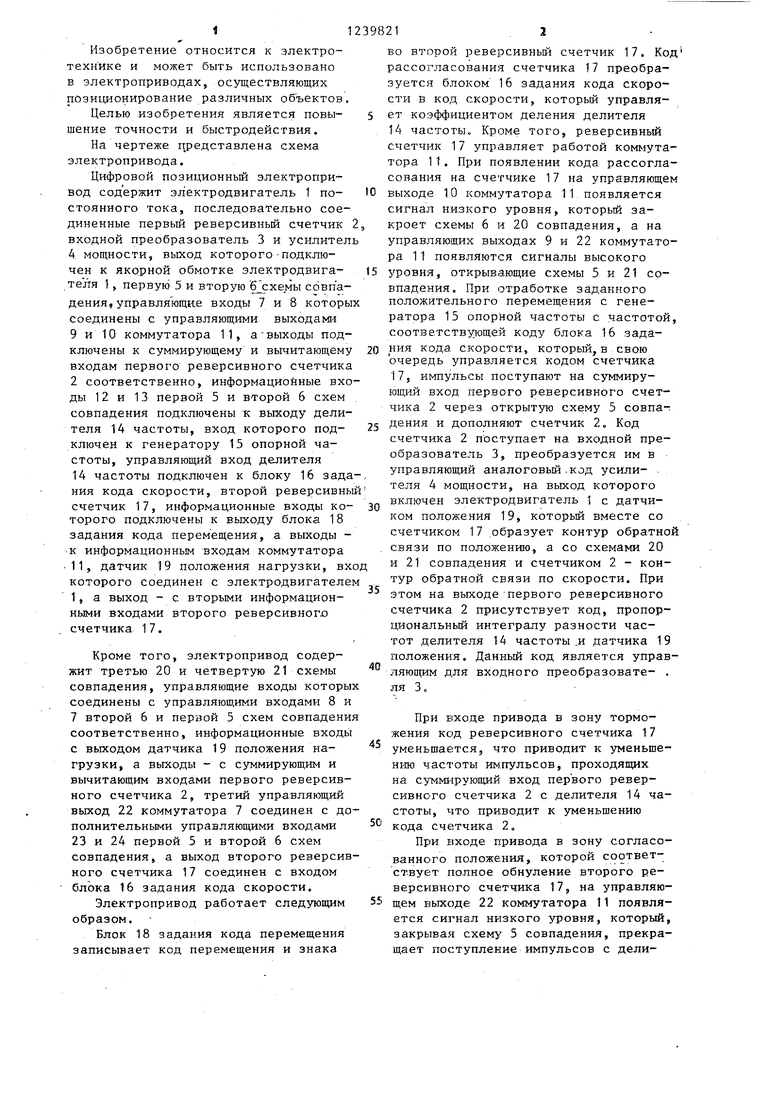
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой позиционный электропривод | 1985 |
|
SU1379928A2 |
| Цифровой позиционный электропривод | 1978 |
|
SU752712A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Электропривод постоянного тока | 1985 |
|
SU1280685A2 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах. Цель изобретения - повьшение точности и быстродействия. Электропривод содержит электродвигатель 1 постоянного тока, реверсивные счетчики (PC) 2, 17, входной преобразователь 3, усилитель мощности 4, схемы совпадения (СС) 5 и 6, коммутатор (К) 11, делитель частоты (ДЧ) 14, генератор опорной частоты 15, блок задания кода скорости (БЗКС) 16, блок задания кода перемещения (БЗКП) 18, датчик положения 19 нагрузки. В электропривод введены две СС 20 и 21, а К 11 имеет дополнительный управляющий выход, а СС 5 и 6 - дополнительные управляющие входы . БЗКП 18 записывает код перемещения и знака в PC 17 и управляет работой К 11. Датчик положения 19 вместе с PC 17 образуют контур обратной связи по положению, а СС 20 и 21 и реверсивным счетчиком 2 - обратньй контур связи по скорости. БЗКС 16 вырабатывает код управления ДЧ 14, соответствующий требуемому перемещению, через СС 6 поступающий на вычитающий вход PC 2, а обратная связь по скорости с датчика положения 19 через СС 20 заводится на суммирующий вход PC 2, т.е. новые связи обеспечивают возвр ат привода в зону согласованного положения. 1 ил. (Л to со со
| Устройство для разгона и торможения исполнительного двигателя станка | 1973 |
|
SU506001A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровой позиционный электропривод | 1978 |
|
SU752712A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
