1
Изобретение относится к автоматике, а именно к системам, содержащим шаговые двигатели, и может быть использовано в качестве устройства j старт - стопного управления шаговым электродвигателем.
Известны устройства, содержащие коммутатор, импульсный датчик положения ротора и генератор старт - Ю стопных импульсов и обеспечивающие старт - стопное управление шаговым двигателем .
Наиболее близким по технической 5 сущности является устройство для старт - стопного управления шаговым электродвигателем, содержащее распределитель имйульсов с триггером направления движения и элементом ИЛИ 20 на входе, датчик положения ротора и rfewfepaxop старт-стопных импульсов 2
Недостатком известных устройств является низкая точность управления 25 шаговым двигателем при переменной нагрузке на валу.
Цель изобретения - повьлнение точности старт-стопного управления шэи переменной нагрузке,JQ
Указаннаяцель достигается тем, что в предлагаемом устройстве, содержащем распределитель импульсов с триггером направления движения и элементов ИЛИ на входе, датчик положения ротора и генератор старт стопных импульсов, последний содержит дополнительный элемент ИЛИ, дифференцирукяций элемент, усилитель с выходным выпрямителем, два пороговых элемента с различными уровнями срабатывания и три формирователя ИМПУЛЬСОВ, один из которых, соединенный выходом с одним из входов основного элемента ИЛИ, связан своим входом со входом трилгера и выходом дополнительного элемента ИЛИ, подключенного каждым из двух своих входов через последовательно включенные формирователь импульсов и пороговый элемент к выходу выпряЛ1итёля, соединенного через усилитель и дифференцирующий элемент с выходом датчика положения.
Такое выполнение устройства позволяет повысить точность отработки шага старт - стопного управления и уменьшить колебания скорости при переменной нагрузке на валу двйАателя за счет изменения момента подачи тормозного и фиксирующих импульсов в зависимости от величины нагрузки.
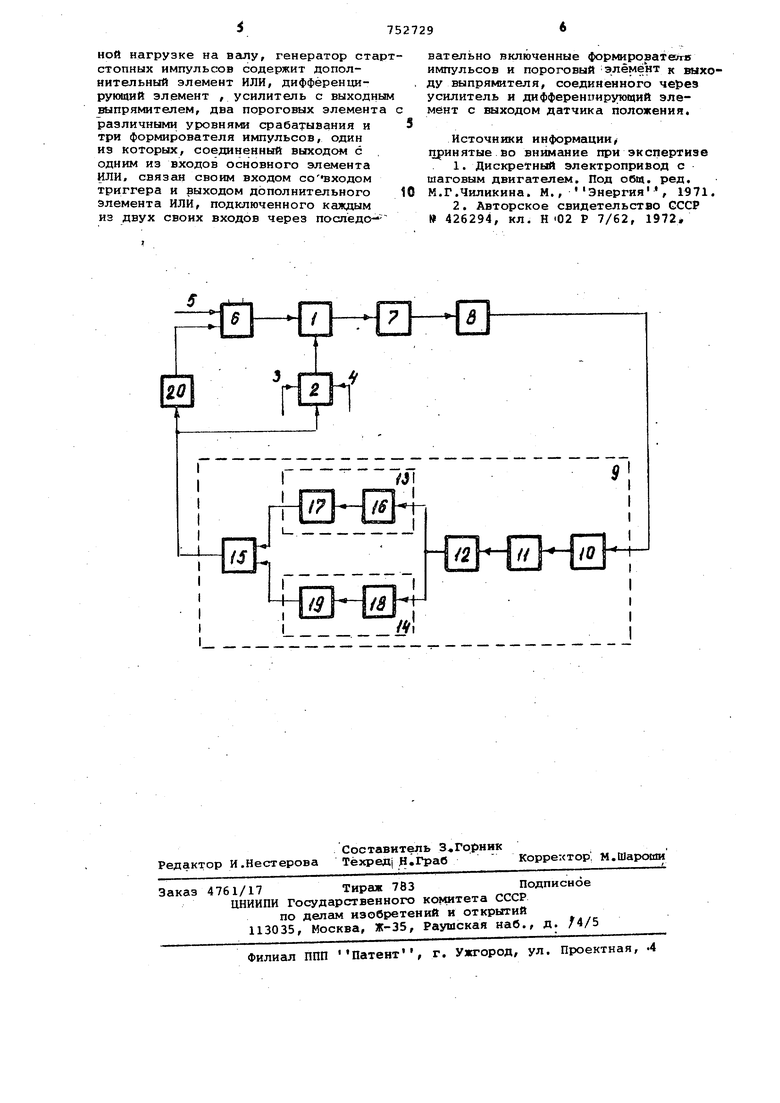
На чертеже приведена блок-с1сема предлагаемого устройства.
Оно включает распредели ель 1 ,рМйульсов с триггером 2 направления движения,имеющим входные шины прямо 3 и обратного 4 движения, шину 5 входных импульсов, соединенную со входом распределителя 1 импульсов элемент ИЛИ 6. К выходу распределителя 1 импульсо-в подключен шаговый электродвигатель 7, с вапсял которого связан аналоговый датчик 8 положения (угла)«Выход датчика 8 соединен со входом генератора 9 старт - стопных импульсов, содержащего последовательно включенны дифференцирующий элемент 10, масштабирующий усилитель 11, двухполупериодный выпрямитель 12, цепи формирования сигналов на торможение 13 и фиксацию 14, включенные параллельно, и элемент 15 ИЛИ. Цепь 13 фор- мирования сигнала на торможение состоит из порогового устройства 16 с .порогом срабатывания Ui и формирователя 17 импульсов, а цепь 14 - фомирования сигнала на фиксацию - из порогового устройства, а 18 с дорог срабатывания Ui(i формирователя 19 импульсов. В качестве пороговых устройств 16,18 может быть использован, например триггер Шмитта. Выход элемента 15 ИЛИ соединен со счетным входом триггера 2 направления движения и входом формирователя 20, выход которого через элемент 6 ИЛИ связан со входом распределителя 1 импульсов. .
Устройство работает следующим образом.
Входной сигнал, поступающий на шину 5 через элемент 6 ИЛИ проходит на вход распределителя 1 импульсов, переключая его на .так Ротор: электродвигателя 7 начинает поворачиваться, и напряжение, про порциональное углу поворота ротора, с выхода датчика 8 угла поступает на вход дифференцирующего элемента 10.
Сигнал с выхода дифференцирующего элемента 10 пропорционален скорости вращения ротора и, в зависимости от состояния триггера 2 направления движения в момент прихода входного импульса шины 5, может иметь отрицательную или положительную полярность, С выхода двухполупериодного выпрямителя 12 на входы пороговых устройств поступает напряжение, пропорциональное абсолютному значению скорости вращения ротора. При достижении этим напжением величины порогов U ии2( срабатывают соответствэнно пороговые устройства 18 и 16, причем в момент срабатывания порогового устройства 1, формирователь 17 формирует сигнал ha .торможение, который передним фронтом через элемент 15. ИЛИ переключает триггер 2 направлени движения в противоположное перBOHa-iajlbHOMy состояние, а задним фронitdM формирователь 20 и элемент б ИЛИ переключает распределитель 1 импульсов на такт в направлении, противоположном предыдущему. В результат возникает тормозной момент электромагнитных сил и угловая скорость ротора а следовательно , и напряжения на выходы двухполупериодного выпрямителя. 12 будут уменьшаться,В; моменты совпадения выходного напряжения, двухполупериодного выпрямителя с порогами U , и Ug срабатывают соответственно пороговые устройства 16 и 18, причем в момент срабатывания порогового устройства 18 формирователь 19 формирует сигнал на фиксацию, который передним фронтом через элемент 15 ИЛИ переключает триггер 2 направления движения в состояние, противоположнсе . предыдущему, а задним фронтом через формирователь 20 и элемент 6 ИЛ переключает распределитель 1 на такт в направлении, обратном предшествующему, и ротор фиксируется в конечн положении. На этом цикл работы старт стопного устройствазавё Яйз ёТся до прихода следующего входного импульса на шину 5.
. Формирователь 17 вырабатыйает сигнал на тормож.ение по переднему фронту выходного импульса порогового устройства 16, а формирователь 19 - на.фиксацию по заднему фронту импульса с выхода порогового устройства. 18. Изменение нагрузки с6провождается из менением сигнала на выходе двухполупериодного выпрями- теля 12 и, следовательно,ригистри-. руется пороговыми устройствами 16 и 18. В результате происходит коррекция интервалов разгона и торможения. Параметры дифференцирующего элемента и величины пороговых уровней У И Ug выбираются из условия сохранения баланса электромагнитной энергии на интервалах разгона и торможения при изменении нагрузки в заданом диапазоне..
Формула изобретения
Устройство для старт - стопного управления шаговым электродвигателем содержащее распределитель импульсов р триггером направления движения и 3nef4eHTOM ИЛИ на . входе, датчик положения ротора.и генератор старт,с.топных импульсов, отличающ .е е Р ЯТем, что,.с целью повыше- ВИЯ точности управления при переменной нагрузке на валу, генератор стартстопных импульсов содержит дополнительный элемент ИЛИ, дифференцирующий элемент , усилитель с выходным выпрямителем, два пороговых элемента с различными уровнями срабатывания и5
три формирователя импульсов, один из которых, соединенный выходом с одним из входов основного элемента ИЛИ. связан своим входом со-входом триггера и выходом дополнительного iO элемента ИЛИ, подключенного каждым из двух своих входов через последо--вательно включенные формироват&гв импульсов и пороговый : элемент к выходу выпрямителя, соединённого усилитель и дифференцирующий элемент с выходом датчика положения.
Источники информации, принятые во внимание при экспертизе
1.Дискретный электропривод с шаговым двигателем. Под оЗД. ред. М.Г.Чиликина. М., Энергия , 1971.
2.Авторское свидетельство СССР 426294, кл. Н02 Р 7/62, 1972
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Приемное стартстопное устройство | 1985 |
|
SU1325721A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Передающее стартстопное устройство | 1974 |
|
SU548937A1 |
| УСТРОЙСТВО ДЛЯ СТАРТ-СТОПНОГО УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1972 |
|
SU426294A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ РЕЧЕВОЙ ИНФОРМАЦИИ | 1992 |
|
RU2008728C1 |
| Устройство для измерения фозового сдвига между двумя синусоидальными напряжениями | 1973 |
|
SU471554A1 |
