13
Изобретение относится к управлению электрическими машинами и может быть использовано для управления шаговым электродвигателем (ЩЦ).
Цель изобретения - повышение быстродействия и КПД путем формирования заданной зависимости тормозного момента от перемещения.
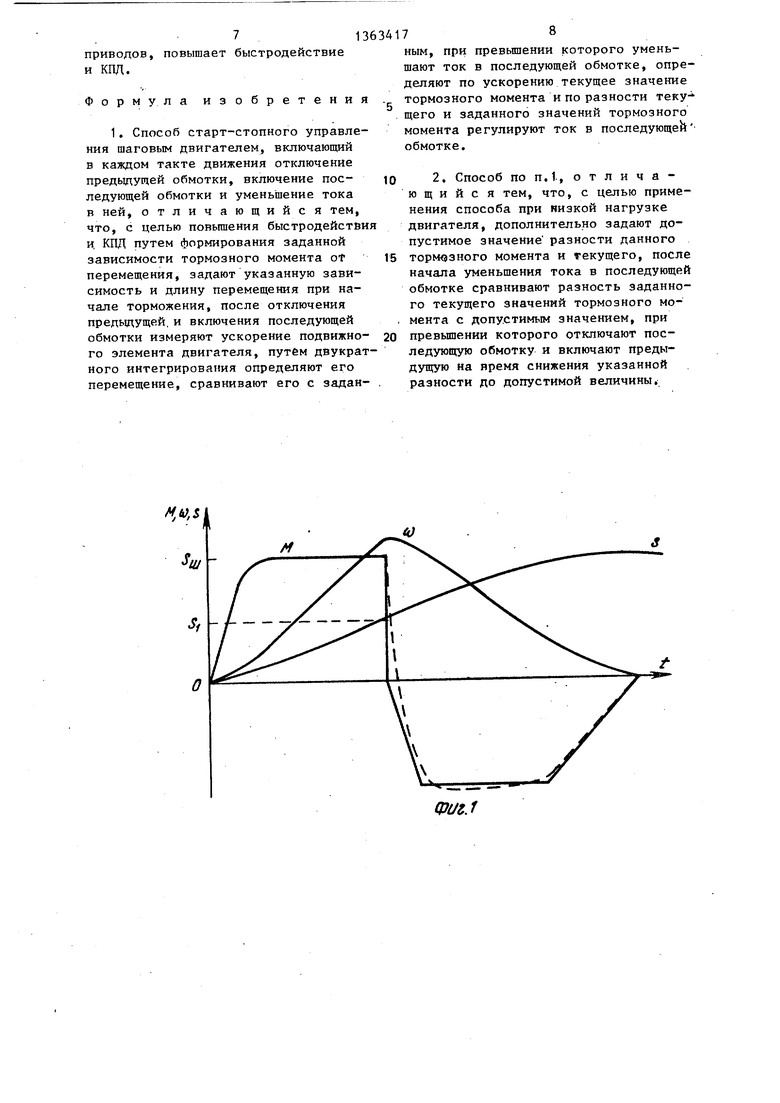
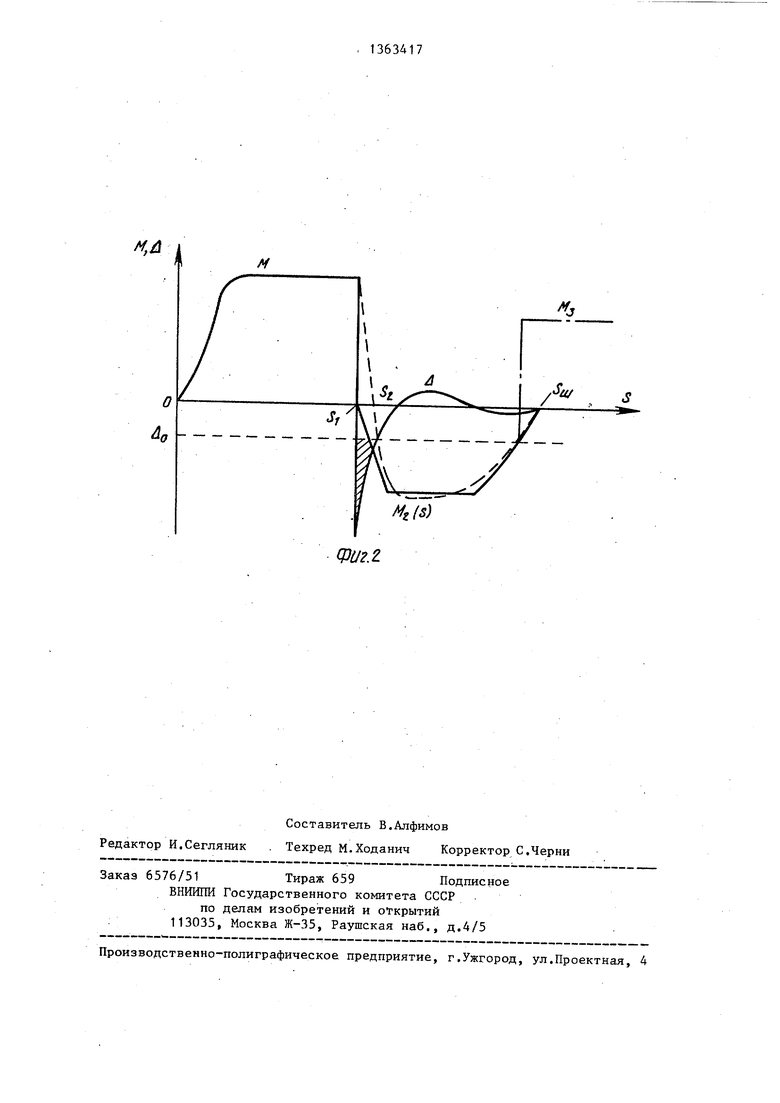
На фиг.1 приведены диаграмма мо- мента, скорости и перемещения ротора щагового двигателя при выполнении одного шага; на фиг.2 - диаграммы зависимости момента от перемещения ротора; на фиг.З - схема устройства, реализующего способ.
Способ реализуется следующим образом.
Отключается предыдущая обмотка и подключается с помощью коммутатора последующая. Питание осуществляется от источника тока и в обмотке создается максимально возможное по условиям эксплуатации значение тока. Закон изменения динамического момента при этом не регламентируется, он зависит от конструкции двигателя и электромеханического переходного процесса при отработке шага.
Измеряется ускорение ротора шаго- вого двигателя, по величине ускорени определяется динамический момент
М М - М АЯН дв с
,. do dt
- момент двигателя;
35
-момент сопротивления;
-момент инерции привода;
-угловое ускорение ротора. 40
Значение ускорения дважды интегрируют, в результате чего получают зависимости скорости и пути пройденного ротором при отработке шага . (фиг.1).
Задаются необходимой зависимостью динамического момента 1ЦЦ в процессе торможения. Эта зависимость определяется заданной интенсивностью тор- можения. На фиг.1 представлена зависимость, позволяющая осуществлять внутришаговое перемещение без перерегулирования. Это достигается меньшим средним значением замедления по сравнению с ускорением и формированием треугольного графика замедления в конце торможения. Подобный закон позволяет достичь высокого
F
0 5
0
5
0
5
Q gg
72
быстродействия и КПД при малом перерегулировании.
Определяется величина пройденного пути S, внутри шага, с которой несГб- ходимо начать процесс торможения. Это значение зависит от соотношения средних величин динамических моментов при пуске и торможении, опреде- ллется в процессе настройки привода. При этом необходимо, чтобы запас кинетической энерг.ии при разгоне не превосходил запаса кинетической энергии -на пути торможения.
При достижении заданного пути осуществляется процесс торможения. Для управления им с помощью блока нелинейности задается по графикам ускорения и пути (фиг.1). График изменения динамического момента М в зависимости от пройденно1;о пути (фиг.2).
Измеряется разность д между текущим значением динамического момента М и желаемым М (фиг.2).
Значение разности используют для уменьшения величины тока в обмотке. При этом возможны два случая: момент сопротивления электропривода значителен и изменение динамического момента в соответствии с заданным возможно за счет изменения (уменьшения) момента двигателя; момент сопротивления незначителен и желаемого изменения динамического момента невозможно достичь за счет изменения момента, создаваемого последующей обмоткой.
Для обеспечения работоспособности шагового электропривода в последнем случае контролируют разность между текущим значением динамического момента и заданного.
Если значение разности д превысит заданную величину й , ос уществляется обратная коммутация обмоток, т.е. отключается последующая и включается предьздущая обмотка ИЩ. Ток при этом задается максимально в озможным, что обеспечивает стопньй режим работы ЩЦ (фиг.2).
При уменьшении разности ниже заданной вновь включается последующая обмотка и осуществляется режим торможения с управлением величиной тока в обмотке.
.Данный способ управления может быть реализован с помощью устройства, которое содержит датчик .1 ускорения,
313
усилитель 2, интеграторы 3 и 4, ключи 5 и 6, переключатели 7 и 8, сум- .мируюпще усилители 9 и 10, компараторы 11 и 12, блок нелинейности 13, преобразователь 14 напряжение-ток, элемент И 15, шаговьй двигатель (ЩЦ) 16, мультиплексоры 1 и 18, формирователь 19, блок силовых ключей 20, дешифратор 21, сумматор 22, реверсив- ный счетчик 23.
Входы первого переключателя 7 соединены с разнополярными шинами питающих напряжений, а выход - со входом первого интегратора 3 и первым вхо- дом в-торого суммирующего усилителя 10 через датчик 1 ускорения и усилитель 2,
Выход первого интегратора 3 соединен со входом второго интегратора 4, выход которого соединен с первыми входами первого суммирующего усилителя 9 и первого компаратора 11. Выход первого суммирующего усилителя 9 через блок нелинейности 13 соеди- нен со вторым входом второго суммирующего усилителя 10, выход которого соединен с первыми входами второго компаратора 12 и второго переключателя 8. Чина третьего опорного нап- ряжения соединена со вторым входом второго компаратора 12, выход которого соединен с первым входом элемента И 15 и с первыми адресными входами первого и второго МуЛЬТИПЛеКСО-
ров 17 и 18. Шина первого опорного напряжения соединена со вторыми входами первого суммирующего усилителя 9 и первого компаратора 11, выход которого соединен со вторым входом эле- мента И 15 и со входами стробирова- ния первого и второго мультиплексоров 17 и 18. 111ина второго опорного напряжения соединена со вторым входом второго переключателя 8, вход управ-; ления которого соединен с выходом элемента И 15, а выход - со входом , преобразователя 14 напряжение-ток. Выход преобразователя 14 напряжение- ток соединен с общим выводом обмоток шагового двигателя 16.
Вторые адресные входы двух мультиплексоров 17 и 18, вход управления первым переключателем 7 и вход направления счета реверсивного счетчика 23 объединены между собой и являются входом направления движения устройств- ва. Выходы реверсивного счетчика 23 соединены с первыми входами суммато174
ра 22, входы которого соединены с выходом обмоток шагового двигателя 16 через последовательно включенные дешифратор 21 и блок силовых ключей 20. Вторые входы сумматора 22 соединены с выходами первого и второго мультиплексоров 17 и 18 коммутируемые входы которых соединены с шинам О, и 1 в соответствии с управлящими кодами. Выводы конденсаторов первого и второго интеграторов 3 и 4 соединены соответственно с выходами первого и второго ключей 5 и 6, управ Ляющие входы которых подключен к выходу формирователя 19, вход которого объединен со счетным входом реверсивного счетчика 23 и является тактовым входом устройства.
Преобразователь 14 напряжение-то выполняется линейным и реверсивным. Суммирующие усилители 9 и 10 реализуют характеристику прецизионный диод.
Устройство работает следующим образом.
Тактовый импульс поступает на счетный вход реверсивного счетчика 23 и вход формирователя 19. В формирователе 23 тактовый импульс дифференцируется и по его переднему фронту формируется импульс управления, открывающий ключи 5 и 6, которые разряжают конденсаторы интеграторов 3 и 4, подготавливая их к работе. Одновременно меняется состояние реверсивного счетчика 23, выходной код которого через сумматор 22 поступает на входы дешифратора 21, дешифрируется и включает соответствующий силовой ключ блока силовых ключей 22. В исходном состоянии напряжение поступает на преобразователь 14 напряжение-ток и задает ток через обмотку Щ 16. ЦЦ 16 начинает отработку шага. .Значение тока, а следовательно, и момента ЩЦ 16 можно изменить, варьируя величину напряжения Vощ Датчик 1 ускорения фиксирует его величину, а следовательно, и величину динамического момента, которая дважды интегрируется интеграторами 3 и 4. На выходе интегратора 3 сигнал пропорционален скорости, а на выходе интегратора 4 - пути. Величина пути S, , с которого начинают торможение, фиксируется компаратором 11. Для этого на один из входов компаратора 11 црдают сигнал.
13
пропорциональный текущему пути, а на второй - Qfn , пропорциональное пути S ,.
При этом их равенстве на выходе компаратора 11 сигнал меняет свое значение с сигнала О на 1, что создает на вход элемента И 15 комбинацию 11 и разрешает работу мультиплексоров .. Элемент И 15 выходным сигналом 1 переключает.второй переключатель 8, который отключает вход преобразователя 14 от опорного напряжения Ujn и подключает к выходу суммирующего усилителя 10. Одновре- менно на выходе первого суммирующего усилителя 9 появляется напряжение, пропорциональное разности текущего пути и S,, Этот сигнал поступает на вход блока нелинейности 13,-имеющего зависимость выходного напряжения от входного, пропорциональную зависимости M(S) (фиг.2). Второй суммирующий усилитель 10, на входы которого поступают сигналы желаемого и текущего динамических моментов, формирует их разность. Причем, этот сигнал формируется только в случае превышения тормозного текущего динамического момента над желаемым. В противном случае сигнал на выходе второго суммирующего усилителя 10 равен нулю. Значение тока через обмотку уменьшается и начинается процесс торможения под дейс вием статического момен та. Если запас кинетической энергии значителен, а момент сопротивления небольшой, то изменение текущего динамического момента в большой мере отстает от желаемого. Это фиксирует второй компаратор 12, При превышении указанной разностью значения д,, задаваемой опорным напряжением срабатывает компаратор 12 и его вы- ходно.й сигнал меняет свое значение с 1 на О. На входе элемента И 15 создается комбинация 01,-в результате чего его выходной сигнал вновь переключает переключатель 8, подклю чая вход преобразователя 14 напряже- ние-ток к опорному напряжению U и создавая значительный ток в обмотке ЩД 16, Одновременно с этим мультиплексоры 17 и 18 и сумматор 22 осуществляют обратную коммутацию обмо- ток ищ 16, Создается стопный режим торможения 11Щ 16,, который длится до тех пор, пока значение разности А не станет ниже & , При этом, вновь
сработает второй компаратор 12 и схема вернется к исходному состоянию, продолжая процесс торможения с управлением тока в обмотке ШД 16.
Обратная коммутация обмоток иЩ 16 при срабатывании второго компаратора 12 осуществляется следующим образом. Если осуществляется движение вперед, то к коду реверсивного счетчика 23 прибавляется код числа (N-1 ), где N - число коммутируемых обмоток иЩ1б если назад - то 1.
На схеме (фиг.З) рассмотрен ШД, имеющий четыре обмотки. При этом реверсивный счетчик 23 двухразрядный а соответствующие двоичные числа 11 и 01. Коды данных чисел формируются мультиплексорами 17 и 18. Старший адресный разряд управляющего кода мультиплексоров 17 и 18 подключен по входу задания направления движения и соответствует О при движении вперед и 1 - назад. При срабатывании второго компаратора; 12 и поступлении сигнала О на младший адресный разряд управляющего кода управляющий код соответствует 00 - при движении вперед и 01 - при движении назад. На первых коммутируемых входа создают комбинацию 11, вторых - 01, третьих и четвертых - 00. Этот код поступает на вторые входы сумматора 22 и суммируется с кодом реверсивного счетчика 23. Когда работа мультиплексоров 17 и 18 запрещена на пути О - S, сигналом с выхода первого компаратора 11, то на их выходах присутс твуют сигналы О.
Для того, чтобы схема управления не содержала двухполярных -блоков 3, 4, 9, 10, 11, 12, 13, при изменении направления движения с помощью первого переключателя 7 меняют знак питающего напряжения датчика 1 ускорения. При этом, знак выходного напряжения датчика .1 не. зависит от направления движения ШД 16.
В случае необходимости создания
в обмотке Щ после отработки шага заданного тока в кривой момента ) формируется полочка Mj, амплитуда которой соответствует, заданному току.
Применение данного устройства позволяет формировать внутришаговьй переходной процесс иЙ, что расширяет диапазон применения шаговых электроприводов, повышает быстродействие и КПД.
Формула изобретения
1. Способ старт-стопного управления шаговым двигателем, включающий в каждом такте движения отключение предыдущей обмотки, включение пос- ледующей обмотки и уменьшение тока в ней, отличающийся тем, что, с целью повьппения быстродействи и, КПД путем формирования заданной зависимости тормозного момента ot перемещения, задают указанную зависимость и длину перемещения при начале торможения, после отключения предыдущей, и включения последующей обмотки измеряют ускорение подвижно- го элемента двигателя, путем двукратного интегрирования определяют его перемещение, сравнивают его с задан-
78
ным, при превышении которого уменьшают ток в последующей обмотке, определяют по ускорению текущее значение тормозного момента и по разности теку- щего и заданного значений тормозного момента регулируют ток в последующей обмотке.
2, Способ ПОП.1., отличающий с я тем, что, с целью применения способа при низкой нагрузке двигателя, дополнительно задают допустимое значение разности данного тормозного момента и текущего, после начала уменьщения тока в последующей обмотке сравнивают разность заданного текущего значений тормозного момента с допустимым значением, при превьшении которого отключают последующую обмотку и включают предыдущую на время снижения указанной разности до допустимой величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Шаговый электропривод | 1986 |
|
SU1372585A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| Лентопротяжное устройство для видеомагнитофона | 1990 |
|
SU1780109A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Асинхронный электропривод | 1985 |
|
SU1280686A1 |
Изобретение относится к электротехнике, к управлению шаговыми двигателями. Цель изобретения - повышение КПД путем формирования заданной зависимости тормозного момента от перемещения. Способ заключается в отключении предыдущей обмотки, подключении последующей обмотки и зада- ьии максимального тока в ней за счет питания от источника тока. Измеряют ускорение ротора шагового двигателя с помощью датчика 1 ускорения. Значение ускорения дважды интегрируют интеграторами 3 и 4, в результате - чего находят пройденный путь. С помощью блока нелинейности 13 формируют желаемый закон изменения ускорения при торможении в функции пути. Сигнал с выхода датчика ускорения 1 сравнивают с сигналом блока нелинейности 13 и их разностью управляют током источника газа. При повышении разности заданной величины с помощью сумматора 22 и коммутатора отключают последующую обмотку и включают дьщ5тцую.до тех пор, пока указанная разность не уменьшится до заданной величины, 1 з.п. ф-лы, 3 ил. d 5S (Л со О5 со 4
Фиг.1
U2.l
| Устройство для старт-стопного управления шаговым двигателем | 1981 |
|
SU964950A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
