(541 УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ЯИЦ

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ЯИЦ ИЗ ЯЧЕИСТОЙ ТАРЫ | 1992 |
|
RU2030862C1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ЯИЦ ИЗ ПРОКЛАДОК | 1973 |
|
SU379236A1 |
| Устройство для перекладки яиц | 1984 |
|
SU1230924A1 |
| Установка для производства керамических облицовочных плиток | 1976 |
|
SU612802A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЯИЦ | 1992 |
|
RU2026615C1 |
| Установка для перегрузки керамических изделий с сушильной вагонетки на обжиговую | 1981 |
|
SU994267A1 |
| ЛИНИЯ ОБРАБОТКИ ЯИЦ | 1992 |
|
RU2048088C1 |
| Устройство для перегрузки яиц из ячеечной тары на транспортер | 1972 |
|
SU490739A1 |
| Устройство для выгрузки яиц из прокладок | 1980 |
|
SU935120A1 |
| Установка для укладки яиц в прокладки | 1981 |
|
SU1024376A1 |

1
Изобретение относится к области автоматизации процесса перегрузки ,яиц с одного транспортного средства на другое и может найти применение 5 на птицефабриках и яйцескладах при сортировке и очистке яиц.
Известно устройство для перегрузки, преимущественно яиц, содержащее поворотную раму, подвешенную к ней fg эксцентричную поступательно-поворотную систему рычагов с захватами для яиц и передаточно-приводные элементы 1 .
Недостатком известного устройст- jj ва является несинхронность перемещения и перекладки яиц, что приводит к их бою.
Известно также устройство для перегрузки яиц/ включающее установлен- 20 ный между горизонтально размещенными подающим и приемным транспортерами перекладчик яиц,выполненный в. виде шарнирно закрепленной нижней частью к опорным элементам поворотной рамы, 25 снабженной кассетой, в отверстиях которой при помощи стержней размещены захваты для яиц 2 .
Известные устройства не обеспечивают синхронное перемещение и пере- JQ
кладку яиц, что также повышает бой последних.
Цель изобретения - снижение боя яиц путем обеспечения синхронности перемещения и перекладки яиц.
Эта цель достигается тем, что устройство снабжено установленной над приемным транспортером параллельно кассете планкой со сквозными пазами, а свободные концы стержней захватов имеют винтовую форму и установлены в упомянутых пазах планки с возможностью поворота, причем поворотная рама подпружинена и снабжена собачкой для соединения ее с приемным транспортером, при этом захваты для яиц выполнены в виде эластичных вилок.
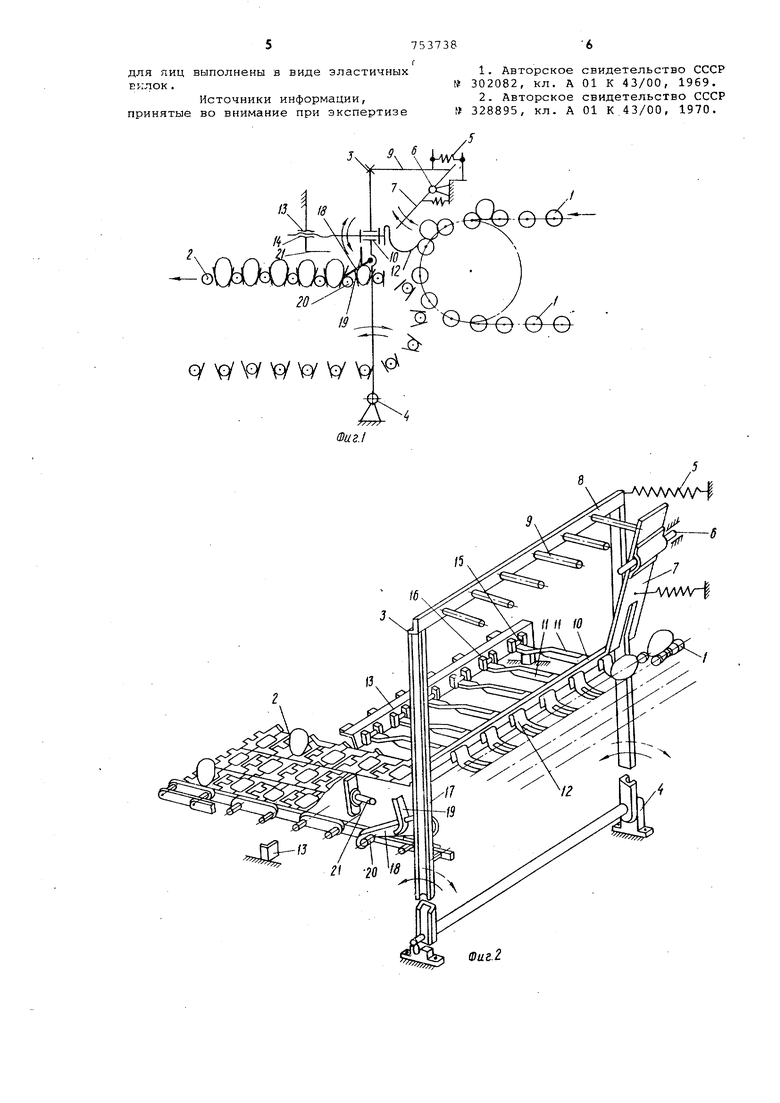
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 устройство в аксонометрии; на фиг.З захват перекладчКка яиц в положении приема яйца (начальное положение); .а фиг. 4 - захват перекладчика при :повороте на 45° (промежуточное положение); на фиг. 5 - захват в положении опускания яйца в ячейку при повороте на 90° (конечное положение).
Устройство для перегрузки яиц содержит перекладчик яиц, установленный между горизонтально размещенными подающим 1 и приемным 2 транспортерами. А1ерекладчик яиц выполнен в виде пов.оротной 3, шарнирно прикрепленвай в нижней части к опорным элементам 4. Рама 3 подпружинена с помощью ьчружины 5. На пути качания рамл 3 ваше уровня подающего транспортера 1 ва осях б закреплены подпружиненные отсекатели 7. На верхней поперечине 3 pSiivib 3 закреплены упоры 9 по количеству отсекателей 7. В средней части рамл 3 закреплена кассета 10, в отверстиях которой установлены стержни 11, несущие захваты 12 для яиц. Захваты
12выполнены в виде эластичных вилок, ГгГад приемным транспортером 2 пгграллельно кассете 10 установлена планка
13со сквозными пазами 14. Сквозные пазы 14 .образованы отверстиями в планке 13, роликами 15 и поперечными ограничителями 16. В пазах 14 с возможностью поворота установлены свободные концы стержней 11, Концы стержней 11 имеют виЕ товую форму. На одной из стоек 17 рамы 3 установлена поворотная собачка 18, имеющая плечо 19. Собачка 18 выполнена с зевом для зацепления с роликом 20 приемн-ого транспортера 2, Выие уровня транспортера 2 Напротив плеча 19 собачки 18 установлен упор 21,
Принцип действия устройства.
В исходном положении рама 3 пустыми захватами 12 занимает вертикальное положение между неподвижными подающим 1 и приемным 2 транспортерами., Соба- ка 18 введена в зацепление с приемным транспортером 2. Отсекатели 7 находятся в закрытом положении, препятствуя выпаданию яиц.
.Включают приемный транспортер 2. Вследствие того, что собачка 18 введена .8 зацепление с его роликом 20, зама 3 с пустыми захватами 12, растягивая пружину 5; совершает качательное движение влево „ Но ход раг-ш 3 ограничен упором 21. Поэтому, как только плечо 19 собачки 18 встречается с упором 21, последняя поворачизается вокруг горизонтальной оси Б вертикальной плоскости и выходит из зацепления с роликом 20 приемно :о транспортера 2, Рама 3, освободигвшись от связи с ним, под действием пр5жи ны 5 совершает качательное движение вправо в направлении подающего тр.анспортера 1, В этот момент включают подающий транспортер 1,
При ходе рамы 3 вправо закрепленные на ней упоры 9 встречаются с отсекателями 7 и поворачивают их относительно осей б, в результате чего они освобохдцают яйца, размещенные на подающем транспортере 1, которые выкатываются и попадают на горизонтальtrb располон енные вилки захватов 12,
в конце хода рамы 3 вправо ппечо 19 собачки 18 отходит от упора 21 - и собачка 18 под действием собственного веса снова входит в зацепление с роликом 20 непрерывноД8ижуш,егося приемного транспортера 2, в резульТсте чего рама 3 с наполненными яй.ами захватами совершает качательное движение влево.
При ходе рамы 3 влево упоры 9 от-, ходят от отсекателей 7 и они под действием пружин возвращаются в исходное положение, запирая яйца, а винтовые концы стержней 11 в это время скользят методу направляющими роликами 15 со скоростью движения приемного транспортера 2 и поворачивают захваты 12 на 90 . Во время хода рамы 3 яйца принимают вертикальное положение и соскальзывают с вилок захватов 12, попадая в ячейки движущегося приемного транспортера 2. На протяжени.и еще некоторого времени рама 3 продолжает ход влево вместе с пустыми захватами 12. В конце ее хода влево плечо 19 собачки 18 встречается с упором 21 и происходит расцепление собачки 18 с роликом 20. Рама 3, освободившись от связи с приемным транспортером 2, под действием пружины 5 с пустыми захватами 12 совершает качательное движение вправо в направлении подающего транспортера 1 за новой партией яиц. И цикл повторяется.
За счет обеспечения синхронности перемещения и перекладки яиц изобретение позволяет зна-гительно снизить их бой в сравнении с известными устройствами .
Формула изобретения
W W W :: f t №
т Q S .
,/
.Авторское свидетельство СССР 302082, кл. А 01 К 43/00, 1969. 2.Авторское свидетельство СССР 328895, кл. А 01 К 43/00, 1970.
