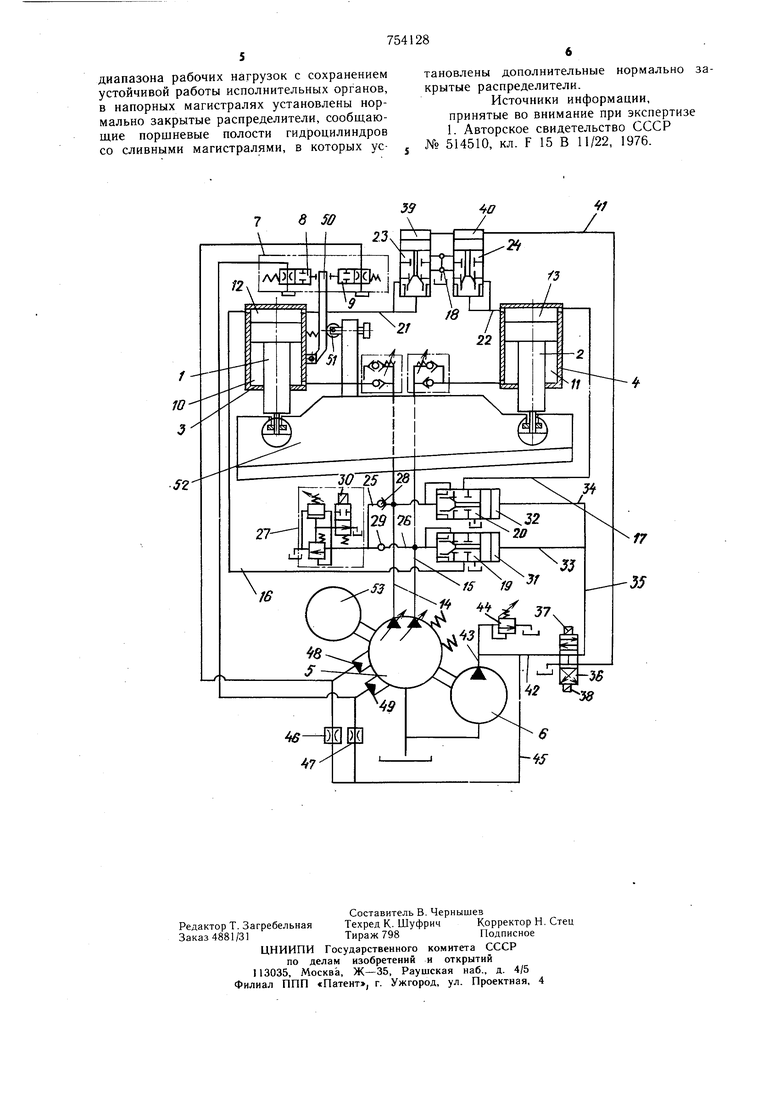
(54) СИСТЕМА СИНХРОНИЗАЦИИ ШТОКОВ ДВУХ ГИДРОЦИЛИНДРОВ Изобретение относится ксистемам синхронизации движения исполнительных органов различных машин и может быть ис пользовано, например, для обеспечения синхронизации движения ползунов листогибочных гидравлических прессов и ножевых балок гидравлических листовых ножниц. Известна система синхронизации штоков двух гидроцилиндров, приводимых регулир уемым двухпоточным насосом, соединяющая дополнительный насос, блок синхронизации с двухходовыми двухпозиционными распределителями, сливные магистрали, а также напорные магистрали, соединяющие разноименные поршневые и штоковые полости гидроцилиндров с регулируемым двухпоточным насосом 1. Недостатком этой системы является то, что при использовании ее в составе листовых ножниц с наклонным ножом, т. е. в случае перемещения точки приложения рабочей нагрузки вдоль ножевой балки на рабочем ходу, она не обеспечивает устойчивого перемещения исполнительных органов. Целью изобретения является расширение диапазона рабочих нагрузок с сохранением устойчивой работы исполнительных органов. Это достигается тем, что в напорных магистралях установлены нормально закрытые распределители, сообшающие поршневые полости гидроцилиндров со сливными магистралями, в которых установлены дополнительные нормально закрытые распределители. На чертеже изображена принципиальная схема описываемой системы синхронизации штоков двух гидроцилиндров. Система обеспечивает синхронизацию движения штоков 1 и 2 гидроцилиндров 3 и 4 и содержит регулируемый двухпоточный насос 5, дополнительный насос 6, блок синхронизации 7 с двухходовыми распределителями 8, 9. Гидроцилиндры 3 и 4 имеют щтоковые 10, 11 и поршневые 12, 13 полости. Напорные магистрали 14, 15 двухпоточного насоса 5 соединяют разноименные полости 10, 13 и 11, 12 гидроцилиндров 3 и 4. Слив рабочей жидкости осуществляется по магистралям 16, 17, 18. В напорных магистралях 15, 14 установлены нормально закрытые распределители 19, 20, сообщающие поршневые полости 12, 13 гидроцилиндров 3, 4 с магистралями 16, 17. В сливных магистралях 21, 22, сообщенных с магистралями 16, 17 через поршневые полости 12, 13 гидроцилиндров 3, 4, установлены дополнительные нормально закрытые распределители 23, 24. Напорные магистрали 14, 15 насоса 5 связаны трубопроводами 25, 26 с предохранительно-разгрузочным клапаном 27 через обратные клапаны 28, 29. Управление предохранительно-разгрузочным клапаном 27 осуществляется электромагнитом 30. Полости управления 31,. 32 распредели телей 19, 20 магистралями 33, 34, 35 связаны с трехпозиционным четырехлинейным распределителем 36, управление которым осуществляется электромагнитами 37, 38. Полости управления 39, 40 дополнительных распределителей 23, 24 подключены при помощи трубопровода 41 к распределителю 36, вход которого трубопроводом 42 подключен к напорной магистрали 43 дополнительного насоса 6, в которой установлен предохранительный клапан 44. Напорная магистраль 43 дополнительного насоса 6 при помощи трубопровода 45 и дросселей 46, 47связана с каналами управления 48, 49 двухпоточного насоса 5. Канал управления 48регулирует подачу рабочей жидкости в напорной магистрали 14 и подключен к распределителю 9, а канал управления 49 регулирует подачу рабочей жидкости в напорной магистрали 15 и подключен к двухходовому двухпозиционному распределителю 8. Управление распределителями 8 и 9 осуществляется при помощи подпружиненного рычага 50, взаимодействующего с роликом, 51, смонтированным на балке 52, перемещение которой обеспечивается штоками 1 и 2 гидроцилиндров 3 и 4. Насосы 5 и 6 приводятся в действие электродвигателем 53. Система синхронизации штоков двух гидроцилиндров работает следующим образом. При включении электродвигателя 53 рабочая жидкость от насоса 5 по напорным магистралям 14 и 15 и через предохранительно-разгрузочный клапан 27, а от дополнительного насоса 6 по магистрали 43 и предохранительный клапан 44 поступает на слив. Рабочий ход щтоков 1 и 2 осуществляется включением электромагнитов 30 и 37. Электромагнит 30 обеспечивает переключение разгрузочного клапана 27 и разобщение напорных магистралей 14, 15 со сливом, а электромагнит 37 переключает распределитель 36, вследствие чего рабочая жидкость под давлением поступает в полости управления 31, 32 нормально закрытых распределителей 19, 20 иоткрывает их. Рабочая жидкость от насоса 5 по магистрали 14 через распределитель 20 и магистраль 17 подводится в порщневую полость 13 гидроцилиндра 4, а по магистрали 15 рабочая жидкость от насоса 5 через распределитель 19 и магистраль 16 подводится в поршневую полость 12 гидроцилиндра 3. При этом штоки 1 и 2 перемешаются, и рабочая жидкость из штоковых полостей 10 и 11 вытесняется в поршневыеполости 13 и 12 гидроцилиндров 3 и 4. Опережение, например, штоком . 1 гидроцилиндра 3 штока 2 гидроцилиндра 4 приводит к следующему: ролик 51 нажмет на подпружиненный рычаг 50, который переместит золотник распределителя 8, и в канале управления 49 давление увеличится; из щтоковой полости 10 поступит в поршневую полость 13 больший объем жидкости, чем из штоковой полости 11 в поршневую полость 12. Увеличение давления в канале управления 49 ведет к уменьщению подачи рабочей жидкости от насоса 5 по напорной магистрали 15 в порщневую полость 12 гидроцилиндра 3. В результате этого происходит выравнивание скоростей щтоков 1 и 2 гидроцилиндров 3 и 4. В случае опережения штоком 2 гидроцилиндра 4 штока 1 гидроцилиндра 3 выравнивание их скоростей перемещения происходит аналогично. При достижении балкой 52 крайнего нижнего положения электромагнит 37 выключается, а электромагнит 38 включается, что приводит к соединению полостей 31, 32 распределителей 19, 20 со сливом и подводу давления рабочей жидкости в полости управления 39, 40 дополнительных распределителей 23, 24, в результате чего рабочая жидкость поступает только в штоковые полости 10, 11 гидроцилиндров 3, 4 (по магистралям подачи 14, 15) слив жидкости из порш, невых полостей 12, 13 происходит по магистралям 16, 17, 21, 22. При достижении балкой 52 крайнего верхнего положения электромагниты 30 и 38 выключаются, а элементы системы занимают первоначальное положение. Предложенная система позволяет рас ширить диапазон рабочих нагрузок испол- . нительных органов с сохранением устойчивости их работы, Формула изобретения Система синхронизации штоков двух гидроцилиндров, приводимых регулируемым двухпоточным насосом, содержащая дополнительный насос, блок синхронизации с двухходовыми двухпозиционными распределителями, сливные магистрали и напорные магистрали, соединяющие разноименные поршневые и штоковые полости гидроцилиндров с регулируемым двухпоточным насосом, отличающаяся тем, что, с целью расщирения диапазона рабочих нагрузок с сохранением устойчивой работы исполнительных органов, в напорных магистралях установлены нормально закрытые распределители, сообщающие поршневые полости гидроцилиндров со сливными магистралями, в которых ус-j тановлены дополнительные нормально закрытые распределители. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 514510, кл. F 15 В 11/22, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| ГИДРОПРИВОД ПРЕССА С ДВУРУКИМ УПРАВЛЕНИЕМ | 2003 |
|
RU2240919C1 |
| Гидравлический привод пресса | 1979 |
|
SU837910A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Гидропривод буровой установки | 1987 |
|
SU1523651A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| Гидропривод правильно-растяжной машины | 1989 |
|
SU1807249A1 |
| Рычажный кантователь | 1987 |
|
SU1418024A1 |
