Изобретение относится к области машиностроения и может быть использовано для балансировки изделий, в том числе крупногабаритных сборных роторов газовых турбин, коленчатых валов и т.п.
Известно, что под балансировкой изделия понимают уравновешивание вращающихся машинных частей (ротора турбины или электродвигателя, коленчатого вала, шкивов и другие). Для большинства роторов машин осью вращения является ось, проходящая через центры опорных поверхностей цапф изделия. Несовпадение этой оси с главной центральной осью инерции (что может быть результатом погрешностей технологии изготовления изделия, либо его конструктивных особенностей) приводит к появлению нескомпенсированных центробежных сил и моментов, вызывающих быстрый износ подшипников, повышенные вибрации машины, изгибные колебания ее элементов и др. При балансировке совмещение осей достигают установкой уравновешивающих масс на изделие, удалением избыточных неуравновешенных масс, зацентровкой изделия в точках пересечения главной центральной оси инерции с поверхностью изделия.
Однако при балансировке таких изделий, как крупные сборные роторы (например, газовая турбина), возникают сложности, связанные с конструктивными особенностями изделия, которые заключаются в том, что основным источником дисбаланса является наличие несоосности его отдельных элементов. Величина такого дисбаланса может быть большой, а возможности по добавлению и удалению балансировочных масс ограничены этой конструкцией.
Известен способ статической балансировки изделий (Основы балансировочной техники, В.А.Щепетельников. М.: Машиностроение, т.2 с.509-510). Способ заключается в том, что изделие устанавливают на стол маятникового балансировочного стенда с центральной сферической опорой и по углам отклонения стола судят о статической неуравновешенности изделия. К недостаткам способа можно отнести низкую точность балансировки.
Более высокой точностью обладает способ статической балансировки изделий (RU №2025680, G 01 М 1/12, 1991). Сущность изобретения: шпиндель с изделием устанавливают на основание на воздушной подушке выводят в горизонтальное положение плоскость воздушной подушки, а затем проводят фотограмметрические измерения горизонтальных координат неподвижной точки вращающегося шпинделя.
К недостаткам известного способа можно отнести сложную конструктивную реализацию способа.
Известно устройство для определения центрального момента инерции и координат центра масс изделия (RU №2095773, G 01 М 1/10, 1994). Сущность изобретения: упругая опора платформы для установки изделия набрана как минимум из шести жестко завязанных между собой элементов, каждый из которых состоит из наружного с мембраной и внутреннего колец, соединенных между собой упругой лентой через мембрану, наружное кольцо снабжено устройством предварительного нагружения ленты в виде дифференциального винтового механизма, ленты элементов расположены в плоскости, перпендикулярной оси опоры, причем наружные кольца элементов жестко закреплены на основании, а на торце внутреннего кольца одного из крайних элементов опоры укреплена платформа для изделия.
Известен способ балансировки роторов (RU №2163008, G 01 М 1/00, 1999). Сущность изобретения: измеряют дисбалансы, определяют параметры корректирующих воздействий, отвечающих условию равенства нулю остаточных дисбалансов в номинальных плоскостях коррекции с учетом смещения центров корректирующих масс от номинальных радиусов и плоскостей коррекции ротора через процедуру моделирования ожидаемых последствий корректирующих воздействий. Сначала за счет статической балансировки добиваются последовательно в каждой номинальной плоскости коррекции приведения к нулю ожидаемых остаточных дисбалансов. Затем для моментной балансировки добиваются для ротора в целом приведения к нулю ожидаемых равных по модулю и противолежащих остаточных дисбалансов. Производят корректировку масс.
К недостаткам вышеописанных способов можно отнести ограниченность их применения, заключающуюся в том, что в ряде случаев имеются конструктивные ограничения на величину балансировочных грузов и удаляемых масс.
Задачи, на решение которых направлено изобретение заключаются в повышении точности и достоверности балансировки изделия при условии конструктивных ограничений на применение корректирующих масс.
Поставленные задачи решены следующим образом.
Способ балансировки изделия, преимущественно сборного ротора, основан на совмещении оси вращения изделия с главной центральной осью инерции изделия и отличается тем, что изделие устанавливают на станок и выбирают нулевую метку угла поворота, приводят изделие во вращение и производят измерения радиального биения каждого элемента изделия с привязкой угла поворота к выбранной нулевой метке, затем результаты измерений по каждому элементу раскладывают в ряд Фурье и для каждого элемента находят параметры - амплитуду и фазу первой гармоники, которые определяют значения полярных координат геометрических центров тяжести элементов, потом по значениям полярных координат, масс и значениям координат центров тяжести вдоль оси вращения определяют положение главной центральной оси инерции изделия и необходимое радиальное смещение опорных поверхностей изделия.
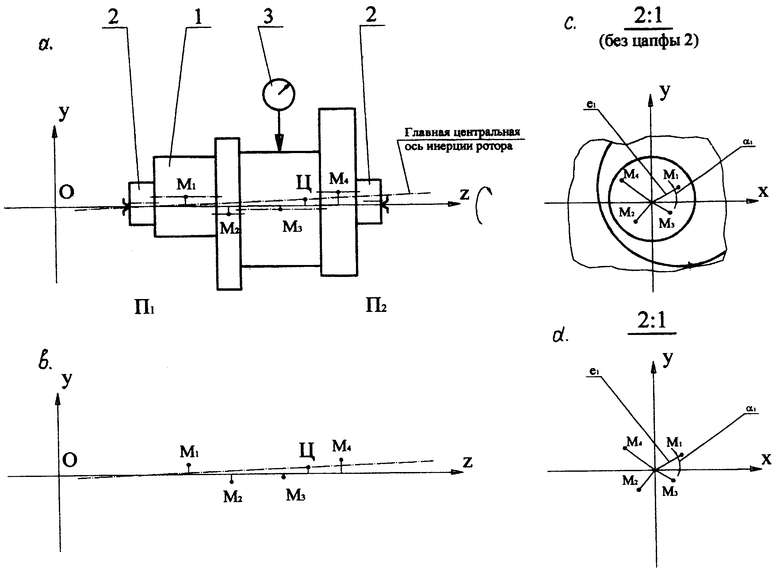
Изобретение поясняется чертежом (a, b, c, d), где приведена схема статической и динамической неуравновешенности изделия (сборного ротора).
Изделие представляет собой ротор 1 сборной конструкции, состоящей из нескольких тел вращения (элементов) и цапф 2. На роторе устанавливают нулевую метку угла поворота и приводят его во вращение, например, в центрах токарного станка. Далее производят измерения радиального биения каждого элемента ротора, например, датчиком 3 с привязкой угла поворота к выбранной нулевой метке. Результат измерения по каждому элементу раскладывают в ряд Фурье и для каждого элемента находят параметры - амплитуду и фазу первой гармоники.
Эти параметры первой гармоники ряда Фурье с высокой степенью точности определяют полярные координаты геометрических центров тяжести элементов - точки M1, M2, М3......
Полярные координаты, вместе с координатой Z центра тяжести каждого элемента вдоль оси и массой элемента, в соответствии с приведенным ниже расчетом, определяют положение главной центральной оси инерции изделия.
Совмещение оси вращения, проходящей через центры опорных сечений поверхностей цапф, с главной центральной осью инерции изделия достигают, например, доработкой цапф.
На приведенном чертеже изображено изделие - ротор, состоящий из нескольких элементов, с осью вращения OZ. Начало координат находится на одной из цапф ротора.
Перед началом расчета известны массы элементов ротора и их координаты в системе, связанной с нулевым сечением ротора (ось вращения - ось Z). Координаты центров масс вдоль оси вращения Zi, координаты подшипниковых шеек (опорных цапф) вдоль оси вращения Zп1, Zп2. Оси координат X, Y связаны с ротором и перпендикулярны оси Z. Задача сводится к тому, что нужно определить необходимые смещения подшипниковых шеек ротора для сведения к нулю расчетного динамического дисбаланса.
Определяют величины и направления эксцентриситетов подшипниковых шеек ротора: еп1, α п1, еп2, α п2.
Переход в декартову систему координат:

Определяют величины и направления эксцентриситетов центров тяжести всех элементов ротора Мi: еi, α i. Переход в декартову систему координат:

Определяют координаты центра тяжести ротора:
Необходимое радиальное смещение поверхности передней подшипниковой шейки (Z=Zп1):

Необходимое радиальное смещение поверхности задней подшипниковой шейки (Z=Zп2):


По результатам расчетов производят доработку шеек, обеспечивая необходимое радиальное смещение опорных поверхностей ротора. При необходимости, известными способами производят окончательную балансировку изделия, вызванную неоднородностью материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| СПОСОБ ОБРАБОТКИ И ТЕХНОЛОГИЧЕСКОЕ МОДУЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ НЕУРАВНОВЕШЕННЫХ ЗАГОТОВОК ТИПА ВАЛОВ | 2009 |
|
RU2414332C2 |
| СПОСОБ БАЛАНСИРОВКИ ВЕТРОКОЛЕСА ВЕРТИКАЛЬНО-ОСЕВОЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2012 |
|
RU2506451C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2013 |
|
RU2554666C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Стенд для балансировки изделий | 1979 |
|
SU862012A1 |
Изобретение относится к испытательной технике. Сущность: совмещают ось вращения изделия с главной центральной осью инерции изделия. Изделие устанавливают на станок и выбирают нулевую метку угла поворота. Приводят изделие во вращение и производят измерение радиального биения каждого элемента изделия с привязкой угла поворота к выбранной нулевой метке, затем результаты измерений по каждому элементу раскладывают в ряд Фурье и для каждого элемента находят параметры - амплитуду и фазу первой гармоники, которые определяют значения полярных координат геометрических центров тяжести элементов. По значениям полярных координат, масс и значениям координат центров тяжести элементов вдоль оси вращения определяют положение главной центральной оси инерции изделия и необходимое радиальное смещение опорных поверхностей изделия. Технический результат: повышение достоверности испытаний. 1 ил.
Способ балансировки изделия, преимущественно сборного ротора, основанный на совмещении оси вращения изделия с главной центральной осью инерции изделия, отличающийся тем, что изделие устанавливают на станок и выбирают нулевую метку угла поворота, приводят изделие во вращение и производят измерение радиального биения каждого элемента изделия с привязкой угла поворота к выбранной нулевой метке, затем результаты измерений по каждому элементу раскладывают в ряд Фурье и для каждого элемента находят параметры - амплитуду и фазу первой гармоники, которые определяют значения полярных координат геометрических центров тяжести элементов, потом по значениям полярных координат, масс и значениям координат центров тяжести элементов вдоль оси вращения определяют положение главной центральной оси инерции изделия и необходимое радиальное смещение опорных поверхностей изделия.
| Способ динамической балансировки вращающихся упругоподвешенных рабочих органов машин | 1972 |
|
SU726453A1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ КРУПНОГАБАРИТНЫХ ПОЛЫХ ТЕЛ ВРАЩЕНИЯ | 0 |
|
SU253421A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| Горелка для дуговой сварки | 1987 |
|
SU1599167A1 |

