(54) ДАТЧИК МОМЕНТА ДЛЯ ПЛАТФОРМЫ ДИНАМИЧЕСКОГО
СТЕНДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик момента для платформы динамического стенда | 1973 |
|
SU488101A1 |
| Устройство для уравновешивания изделий | 1978 |
|
SU763711A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ ДВИГАТЕЛЯ РЕАКТИВНОГО ТИПА | 1994 |
|
RU2088899C1 |
| Стенд для испытания бурильного инструмента | 1982 |
|
SU1054533A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОЙ КОМПЕНСАЦИИ ИНДУКТИВНОГО ПАДЕНИЯ НАПРЯЖЕНИЯ ЛИНИЙ ПЕРЕДАЧИ | 1936 |
|
SU52315A1 |
| Ветроэлектрический агрегат, способ управления ветроэлектрическим агрегатом и устройство для его осуществления | 1985 |
|
SU1492078A1 |
| Линейный электрический двигатель | 1981 |
|
SU1128343A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2000 |
|
RU2167071C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА | 2012 |
|
RU2499984C1 |
1
Изобретение относится к области силоизмерительной техники и может быть использовано на трехстепенном динамическом стенде для подачи на его платформу управляющего момента.
H3BecteH датчик момента, содержащий управляемой дугостаторный асинхронный двигатель с ротором, установленным на платформе, и статором, закрепленным на корпусе стенда ГОНедостатки этого устройства связанны с возтцсновением боковой составляющей усилия, превьпвающей полездаое усилие.
Н;шболее близким по технической сущности к изобретению является датчик момента для платформы динамического стенда, содержавший дугостаторный асинхронный двигатель, основное коромысло, установленное на призматической опоре, индикатор углового положения и цепь силовой компенсации ,23 .
Недостатком данного датчика момента является низкая точность измерения момента.
Цель изобретения - повьппение точности измерения момента.
Указанная цель достигается за счет того, что в него введены дополнительное коромысло, призматическая опора и два звена, причем дополнительное коромысло установлено на призматической опоре и связано с основным коромьгслом двумя звеньями, на одном из которых установлен статор асинхронного двигателя, при этом оба коро «.1сла установлены в вертикальной плocf кости параллельно друг другу, а призматические опоры размещены на вертикальной оси симметриикорокысел.
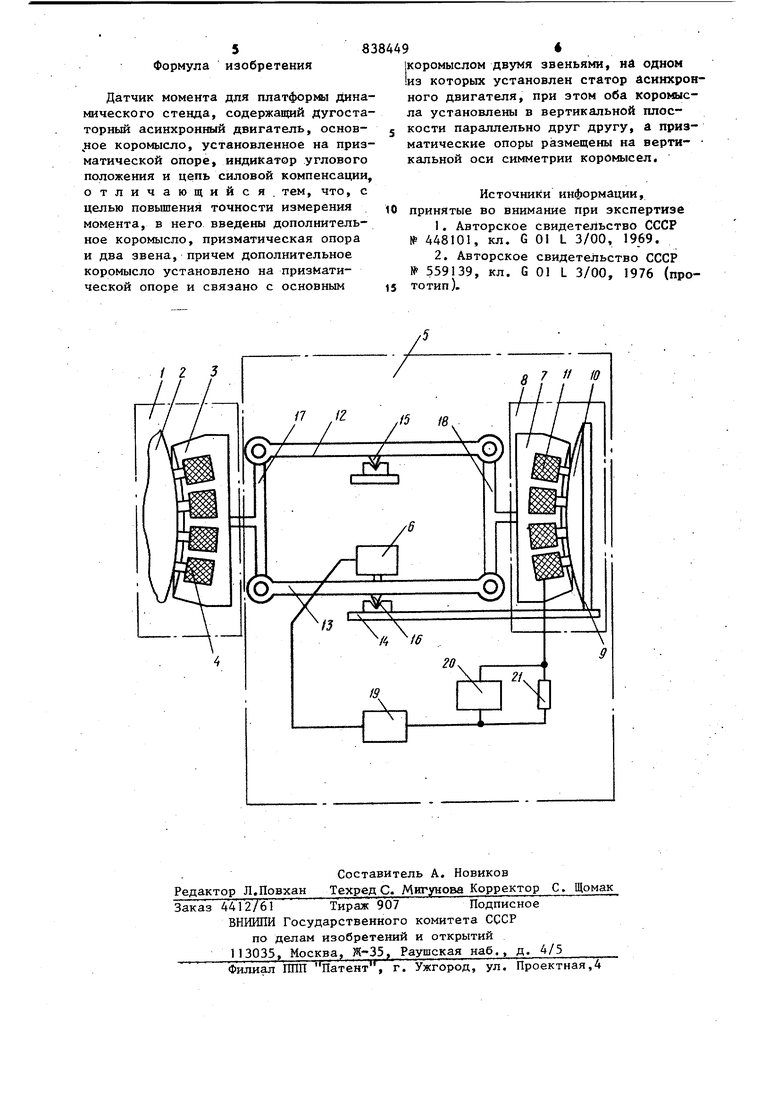
На чертеже схематически приведен датчик момента для платформы динамического стенда.
Устройство содержит двигатель 1, который имеет сферический ферромагнитный ротор 2, установленный на платформе стенда (на не показан) и статор 3, В статоре уложена и зак(реплева многофазная обмотка 4. Компенсаидаонный измеритель 5 момента содержит индикатор 6 углового положения статор 3 основного двигателя 1 и статор 7 двигателя 8 компенсации измеряемого момента, выполненный .в виде управляемого дугостаторного асинхронного двигателя 9, идентичного основному и состоящего из заторможенного сферического ротора 10 и статора 7 с многофазной обмоткой 11, Подвижная система измерителя момента выполнена виде двух одинаковых основного 2 и дополнительного 13 коромысел, расположенных друг над другом в вертикальной плоскости. Коромысла установлены в корпусе 14 с помощью призматических опор 15 и 16, размещенных на прямой, параллельной направлению действия измеряемого и компенсирующего усилий. Коромьгсла 12 и 13 шарнирнр связаны друг с другом звеньями 17 и 18, на которых симметрично закреплены статоры 3 и 7 основного двигателя 1 и двигателя 8 силовой компенсации изме ряемого .момента. Угловое положение подвижной системы автоматически регулируется с помощью следящей системы, состоящей из дифференциального датчика 6 углового положения подвижной системы, усилителя 19 и двигателя 8, развивающего компенсирующее усилие. Устройство работает следующим образом, В обесточенном состоянии многофаз ной обмотки 4 основной двигатель 1 не .развивает реактивного усилия, под вижная система компенсационного изме рителя момента уравновешена, дифференциальный датчик 6 углового положения сбалансирован, и ток в обмотке И двигателя 8 отсутствует. При пода че напряжения на основной двигатель 1 возникает реактивное усилие, действующее на его статор 3, пропорциональное развиваемому двигателем 1 моменту, приложенному к платформе ди мического стенда, В зависимости от направления момента, развиваемого основным двигателем 1, подвижная сис тема поворачивается относительно опо . вращения влево или впрйвр, что приводит к смещению подвижной части дат чика 6 углового положения относитель . но среднего положения. На входе усилителя 19 следящей системы появляется сигнал, фаза которого определяется направлением вращения подвижной системы компенсационного измерителя момента. Указанный и сформированный по определенному алгоритму усилителем 19 ток поступает в обмотку 11 Двигателя 8, который обеспечивает компенсацию вертикальной составляющей реактивного усилия, развиваемого основным двигателем 1. Регистрация момента, приложенного к платформе динамического стенда, осуществляется измерительным прибором 20 по величине падения напряжения на эталонном сопротивлении 21, включенном в цепь обмотки 11 двигателя S компенсации измеряемого момента. В предлагаемом устройстве выполнение многофазной обмотки, закрепленной в пазах статора, позволяет снять ограничение на величину момента, развиваемого основным двигателем, а-применение в качестве элемента силовой компенсации измеряемого момента двигателя, идентичного основному, дает возможность обеспечить взаимную компенсацию горизонтальных составляющих реактивных усилий при работе двигателей на одинаковых; немагнитных зазорах, снизить погрешность измерения, вызванную нарущением статического равновесия подвижной системы за счет температурных деформаций ее элементов, и получить линейную статическую характеристику устройства. Изменение зазора между ротором и статором в основном двигателе при пространственном движении платформы динамического стенда, вызванное несовершенством изготовления и установки сферы большого диаметра, приводит к появлению нескомпенсированной горизонтальной составляющей реактивного усилия. Однако в силу исполнения подвижной системы компенсационного измерителя момента в виде шарнирного иараллелограммного механизма эта составляющая не создает момента относительно осей вращения, а приводит лишь к появлению в ножевых опорах горизонтальных реакций, уравновешивающих нескомпенсиррванное усилие тяжения основного двигателя. Это позволяет существенно увеличить точность измерения управляющего момента, развиваемого основным двигателем.
