Ю
QD C3U Iv
Изобретение относится к измерительной технике и может быть использовано для определения координат центра масс изделий.
Известно устройство для определения координат центра масс изделия, содержащее основание, закрепленную на нем опору, установленную на опоре раму для установки изделия и механизм уравновешивания, размещенный на раме
Недостатками этого устройства являются низкая точность, обусловленная уравновешиванием рамы передвижением грузов вручную, и невозможность определения положения центра масс по трем координатам.
Наиболее близким к изобретению по технической сущности является устройство для определения координат центра масс изделия, содержащее основание, закрепленную на нем опору, установленную на опоре раму, размещенные на последней узел крепления изделия и механизм уравновешивания, размещенные на основании блок управления механизмом уравноветаиваиия„ систему циклического арретирования, взаимодействукяцую с рамой, блок подачи сжатого воздуха, связанный с системой циклического арретирования, счетно-рвиакхций блок, соединенный с системой управления механизмом перемещения. Узел крепления изделия .в устройстве выполнен в виде закрепленной на раме упорной стойки 2.
Недостаткакм этого устройеггва являются невозможность определения положения центра масс по трем координатам и низкая производительность и то.чность измерений, обусловленные ошибками при установке изделий на упорную стойку.
Цель изобретения - повышение точности и производительности измерений координат центра масс изделий.
Поставленная цель достигается тем что в устройстве для определения координат центра масс изделия,, содержащем основание, закрепленную на нем опору, установленную на опоре раму, размещенные на последней узел крепления изделия и механизм уравновешивания, размещенные на основании блок управления механизмом уравнов& -. шивания, систему ци1шического арре тирования, взаимодействующую с рамой, блок подачи сжатого воздуха, связанный с системой циклического арретирования, счетно-решающий блок, соединенный с системой управления механизмом перемещения, узел крепления изделия выполнен в виде закреп ленного на раме стакана, размещенного в нем кольца с тангенциальными попатками на торцах, установленного с возможностью поворота вокруг оси, а на поверхностях корпуса,, обращенных к кольцу, выполнены сопла, связанные с блоком подачи сжатого воздуха.
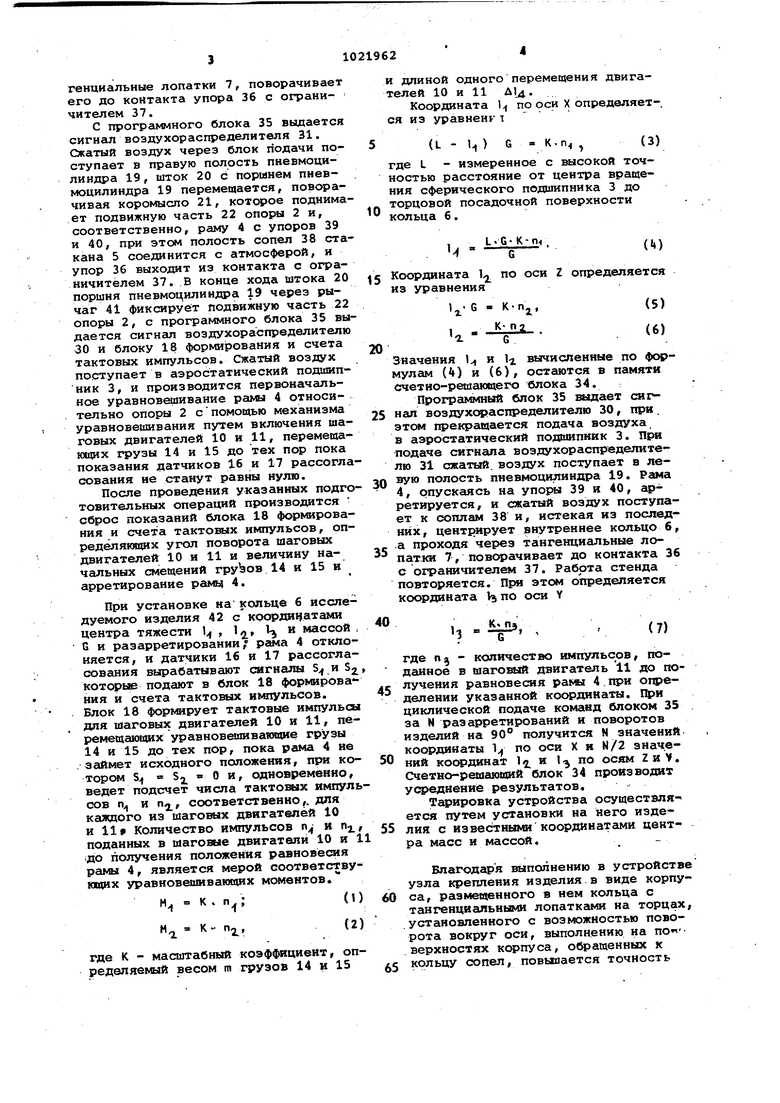
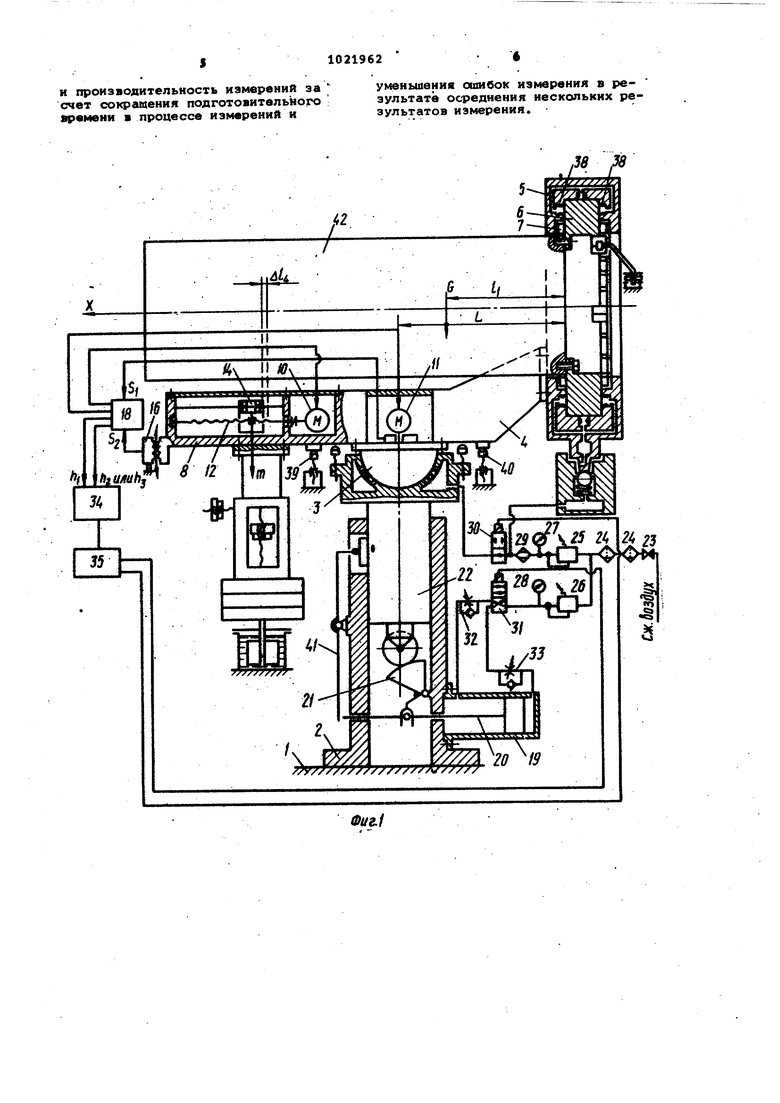
На фиг. 1 представлена схема устройства, на фиг. 2 - механизм уравновешивания устройства по осям Y, Z и схема узла крепления изделия.
Устройство содержит снование 1, закрепленную на нем опору 2, установленную на опоре 2 посредством сферического аэростатического подшипника 3 раму 4, размещенные на рама узел крепления изделия, выполненный в виде стакана 5 и размещенного в нем кольца 6 с тангенциальными лопатками 7 на торцах, установленного с возможностью поворота вокруг оси, и механизм уравновешивания в виде двух взаимно перпендикулярных плеч 8 и 9 снабженных шаговыми двигателями 10 и 11 с ходовыми винтами 12 и 13 и перемещае1лыми грузами 14 и 15. На основании размещены блок управления механизмом уравновешивания, выполненный в виде датчиков 16 и 17 рассогласования для фиксации величины и знака отклонения платформа, связанных со счетчиком 18 тактобых импульсов, система циклического арретирования, выполненная в виде пневмоцилиндра 19 со штоком 20, связанным в коромыслом 21, взаимодействующим с роликом подвижной части 22 опоры 2 взаимодействующей со сферическим подшипником 3 рамы 4, блок подачи .сжатого воздуха, состоящий из крана 23, фклътров 24, регуляторов 25 и 26 давления, манометров 27 и 28, осушителя 28 воздуха, воздухораспределителей 30 и 31 и дросселей 32 и 33 с обратным клапаном, связанный с системой циклического арретирования.
На основании также размещен счетно-решающий блок 34, соединенный со счетчиком 18 тактовых импульсов и программным блоком 35, служащим для управления блоком подачи сжатого, воздуха.
Узел крепления изделия снабжен упором 36, размещенным на кольце 7 и взаимодействующим с подпружиненным ограничителем 37. На поверхностях стакана 5 узла крепления, обращенных к кольцу 7, выполнены сопла 38, связанные с блоком .подачи воздуха. Основание устройства снабжено также регулируемыми упорами 39 и. 40, служащими для упора рамы 4 вне процесса измерений.
Устройство работает следующим образом.
В исходном положении, при отсутствии исследуемого изделия, сжатый воздух через блок подачи воздуха поступает к соплам 38 стакана 5. Истекая из сопел 38, воздух центрирует кольцо 6, а проходя через таненциальные лопатки 7, поворачивает го до контакта упора 36 с ограниителем 37.
С программного блока 35 выдается игнал воздухораспределителя 31. жатый воздух через блок подачи поступает в правую полость пневмоцииндра 19, шток 20 с поршнем пневоцилиндра 19 перемещается, поворачивая корокысло 21, которое поднимает подвижную часть 22 опоры 2 и, соответственно, раму 4 с упоров 39 40, при этом полость сопел 38 стакана 5 соединится с атмосферой, и пор 36 выходит из контакта с ограничителем 37. В конце хода штока 20 поршня пневмоцилиндра 19 через рычаг 41 фиксирует подвижную часть 22 опоры 2, с программного блока 35 выается сигнал воздухораспределителю 30 и блоку 18 формирования и счета тактовых импульсов. Сжатый воздух поступает в аэростатический подшипник 3, и производится первоначальное уравновешивание рамы 4 относительно опоры 2 спомощью механизма уравновешивания путем включения шаговых двигателей 10 и 11, перемещающих грузы 14 и 15 до тех пор пока показания датчиков 16 и 17 рассогласования не станут равны нулю.
После проведения указанных подготовительных операций производится сброс показаний блока 18 формирования и счета тактовых импульсов, определяющих угол поворота шаговых двигателей 10 и 11 и величину начальных смещений грузов 14 и 15 и арретирование рамы 4.
При установке на кольце 6 исследуемого изделия 42 с крордш1|атами центра тяжести Ц , 1, Ц и массой , G и разарретировании; рама 4 отклоняется, и датчики 16 и 17 рассогласования вырабатывают сигналы 5 и $2, которое подают в блок 18 формирования и счета тактовых импульсов. Блок 18 фоЕ мирует тактовые импульсы для шаговых двигателей 10 и 11, перемещающих уравновешивающие грузы 14 и 15 до тех пор, пока рама 4 не займет исходного положения, при котором , одновременно, ведет подсчет числа тактовых импульсов п и п, соответственно,, для каждого из шаговых двигателей 10 и 11 Количество импульсов п и п, поданных в шаговые двигатели 10 и 11 до получения положения равновесия рамы 4, является мерой соотввтствуKnpix уравновшиивакицих моментов.
К . п /:(1)
м
1
К п
м.
г«
где К - масштабный коэф циент, определяемый весом m грузов 14 и 15
и длиной одногоперемещения двигателей 10 и 11 Д1д.
Координата 1 по оси X определяет-. ся из уравненк т
(L - Ц )
(3)
K.nj
где L - измеренное с лсокоЯ точностью расстояние от центра вращения сферического подшипника 3 до
торцовой посадочной поверхности
кольца 6.
J-iG-K-ni
()
1.
5 Координата 1 по оси Z определяется из уравнения
5)
. K-nj.
1 K. П2 (6)
G
Значения 1 и 1 вычисленные по формулам (k) и (6), остаются в памяти счетно-раиающего блока 34.
Программный блок 35 выдает сигнал воздyxqpacщ eделителю 30, при этом прекращается подача воздуха в аэростатический подшипник 3. При подаче сигнала воздухораспределителю 31 сжатий, воздух поступает в левую полость пневмоцилиндра 19. Рама 4, опускаясь на упоры 39 и 40, арретируется, и сжатый воздух поступает к соплам 38 и, истекая из последних, центрирует внутреннее кольцо б,
с а проходя через тангенциальные лопатки 7, поворачивает до контакта 36 с ограничителем 37. Работа стенда повторяется. При этом определяется коор шната Ц по оси Y
К,
(7)
где «5 - количество импульсов, подш1ное в шаговый двигатель 11 до получения равновесия 4. определении указанной косчрдинаты. Щ)И циклической подаче комгюд блоком 35 за N разарреткрований и поворотов изделий на 90° получится N значений косфдинаты 1 по оси X и И/2 значеНИИ косфдинат 1 и 1- по осям ZKY. Счетно-решающий блок 34 производит усреднение результатов.
Тарировка устройства осуществляется путем установки на него издеЛИЯ с известными координатами центра масс и массой.
Благодаря выполнению в устройстве узла крепления изделия в виде корпуса, размещенного в нем кольца с
тангенциальными лопаткгши на торцах, установленного с возможностью поворота вокруг оси, выполнению на верхностях , обращенных к кольцу сопел, повышается точность
и производительность измерений за | сгчет сокращения подготовительного времени в процессе измерений и
уменьшения ошибок измерения в результате осреднения нескольких результатов измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| Стенд для определения массы и координат центра масс изделий | 1981 |
|
SU1096508A1 |
| Робот | 1988 |
|
SU1538994A1 |
| Устройство для определения статических моментов и моментов инерции изделий | 1985 |
|
SU1596216A1 |
| Устройство для аттестации большегрузных образцовых гирь | 1979 |
|
SU773444A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Стенд для сборки шпиндельных коробок | 1987 |
|
SU1530399A1 |
| Автоматическое устройство сбора, сортировки и переработки пластиковых и стеклянных бутылок | 2021 |
|
RU2770022C1 |
| Автоматический объемно-весовой дозатор | 1970 |
|
SU1841250A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ | 1990 |
|
RU2031384C1 |
УСТРОЙСТВО ДНИ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА №CC ИЗДЕЛИЯ, содержащее основание,, закрепленную на нем опору, -установленную на опоре . раму, размещенные на последней узел крепления изделия и механизм уравновешивания, размёценн{(е на основании . блок управления механизмом уравновецшвания, систему циклического арретирования, взаимодействующую с рамой, блок подачи сжатого воздуха,связанный с циклического арретирования, счетно-решаюций блок, соединенный с системой управления Механизмсм перемещения, о т л и ч аю щ е е с я тем, что, с целью повышения точности и производительности, узел крепления изделия выполнен в виде закрепленного на раме стакана, разме щенного в нем кольца с тангенШ1альнь94И лопатка ш на торцах, установленного с возможностью поворота вокруг оси , a на поверхностях кор§ пуса, обрсщенных к кольцу, выполнеten ны сопла, связанные с блоком подачи сжатого воздуха.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ТЕЛ ПРОИЗВОЛЬНОЙ ФОРМЫ | 0 |
|
SU303288A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
