1
Изобретение относится к электроизмерительной технике и предназначено для использования при создании аналоговых и цифровых мостов перемен-с ного тока, служащих для измерения комплексных сопротивлений и., проводимостей.
Известны способы уравновешивания автоматических мостов, в основу ко- .п торых положены пробные изменения уравновешивающих параметров (модуляция)
CiJ.
Наиболее близким к изобретению является способ, основанный на им- 15 пульсной модуляции уравновешиваницих параметров, по которому формирование положительных и отрицательных регулирующих воздействий для уравновешивания моста по каждому из регули- 20 руемых параметров производят разновременно посредством осуществления, импульсной модуляции параметра сначала одного знака, а потом противоположного с помощью одного и того же 25 модулятора 2.
Недостатком известного способа является невысокое быстродействие уравновешиваемых по этому способу приборов, обусловленное необходимостью зат-зо
рат времени на каждое положительное и каждое отрицательное модулирующее воздействия отдельно, а также на переходные процессы в усилительно-преобразовательном тракте приборов, вызванные прохождением через него модуляционных сигналов разных знаков.
Целью изобретения является повышение быстродействия мостов.
Цель достигается тем, что по способу уравновешивания автоматических модуляционных экстремальных мостов переменного тока с помощью регулирующих воздействий, формируемых по каждому из уравновешивающих параметров на основании модуляционных воздействий, получаемых посредством пробных положительных и отрицательных изменений соответствующего параметра измерительной цепи, Положительное и отрицательное проб;ные изменения (модуляцию)при формировании положительного и отрицательного регулирующих воздействий по уравновешивающему параметру осуществляют одновременно и фиксируют на время заданного цикла уравновешивания, полученные положительное и отрицательное модуляционные воздействия раздельно векторно суммируют с выходньом напряжением мостовой измерительной цепи, а затем из полученных сумм порознь скалярно вычитают значение выходного напряжения этой цепи, первую полученную разность используют в качестве положительного, а вторую - в ка.честве отрицательного регулирующих воздействий.
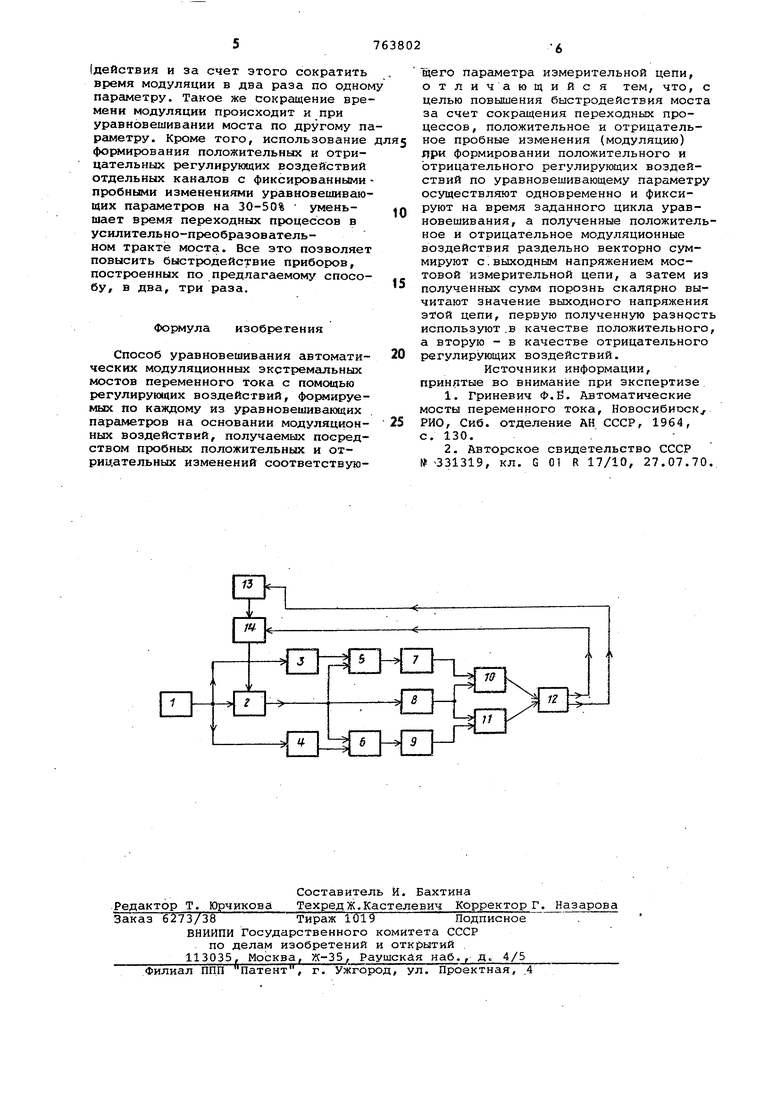
Предлагаемый способ уравновешивания применим для большого класса автоматических мостов, измерительные цепи которых описьшают.ся линейными функциями комплексного переменного. На чертеже приведена упрощенная схема цифрового автоматического моета, для реализации предлагаемого способа при уравновешивании прибора только по одному параметру.
Прибор содержит генератор питания 1, мостовую измерительную цепь 2, модуляторы 3 и 4, сумматоры 5 и б, усилители-преобразователи 7, 8, 9, вычитающие устройства 10 и 11, детектор равновесия 12, триггер реверса 13 и реверсивный счетчик 14 с цифровы отсчетным устройством.
Модулятор 3 осуществляет фиксированное положительное, а модулятор 4 фиксированное отрицательное модулирующие воздействия. На сумматоре 5 производится векторное сложение модуляционного воздействия, поступающего с модулятора 3, с выходным напряжени ем измерительной цепи 2, а на сумматоре б осуществляется векторное вычитание модуляционного воздействия поступающего с модулятора 4, из выходного напряжения мостовой измерительной цепи. Сигналы с мостовой измерительной цепи и сумматоров поступают на усилители-преобразователи 7, 8, 9, где они усиливаются и детектируются. Усилители-11реобразователи в зависимости от выходного .детектирующего устройства могут вьщавать сигналы в виде их средних, эффективных или амплитудных значений. Эти сигналы поступают на вычитающие устройства 10 и 11. Устройство IQ производит вычитание сигнала, пропорционального, например, среднему значению выходного напряжения мостовой измерительной цепи, из выходного суммарного сигнала усили1еля-преобразователя 7, а устройство 11 производит вычитание того же сигнала из выходного разностного сигнала усилителяпреобразователя 9. Выходной сигнал вычитающего устройства 10 фактически представляет собой положительное, а выходной сигнал вычитающего устройства 11 - отрицательное регулирующее воздействия в виде постоянного тока или напряжения. Эти воздействия постпают на детектор равновесия 12, который изменяет их форму и превращает в серии импульсов для управления
триггером реверса 13 и реверсивным счетчиком 14. Реверсивный счетчик изменяет уравновешивающий параметр измерительной цепи 2 в направлении, определяемом состоянием .триггера реверса.
Уравновешивание моста по предлагаемому способу происходит следующим образом.
; Пусть мостовая цепь 2 выведена из состояния равновесия. Модулято- ры 3 и 4 осуществляют соответственно положительное и отрицательное модулируквдие. воздействия и фиксируют их. Если в измерительной цепи 2 уравновешивающий параметр для получения равновеси я нужно, например, увеличить то модуляционное воздействие модулятора 3 вызывает уменьшение среднего значения выходного напряжения сумматора 5 , а модуляционное воздействие модулятора 4 вызывает увеличение среднего значения выходного напряжения сумматора 6. Следовательно, после усиления и детектирования сигналов усилителями-преобразователями 7, 8 и 9 вычитающим устройством 10 формируется отрицательный, а вычитающим устройством 11 - положительный сигналы. Так как уменьшение выходного напряжения сумматора соответствует стремлению измерительной цепи к равновесию при заданном модулирующем воздействии, то отрицательный выходной сигнал устройства 10 означает необходимость увеличить значение уравновешивающего параметра, т.е. устройством 10 формируется положительное регулирующее воздействие. Детектор равновесия 12 формирует соответствующий импульс для переброса триггера реверса 13 в состояние 1, и на реверсивный счетчик подаются импульсы до тех пор, пока прибор не придет в состояние равновесия.
Аналогично происходит уравновешивание моста, если измерительная цепь выведена из состояния равновесия так, что значение уравновешивающего параметра нужно уменьшить. Только в этом случае вычитающим устройством 11 формируется отрицательное регулирующее воздействие, а триггер реверса 13 перебрасывается в состояние 1. На реверсивный счетчик 14 с детектора равновесия 12 подаются импульсы до тех пор, пока измерительная цепь не придет в состояние равновесия.
В равновесном состоянии оба модулирующих воздействия вызывают только увеличение выходных сигналов сумматоров 5 и б. Следовательно, вычитающими устройствами 10 и 11 формируются только положительные сигналы и регулирующие воздействия отсутствуют.
Применение предлагаемого способа позволяет совместить положительное и отрицательное модуляционные воз(действия и за счет этого сократить время модуляции в два раза по одно параметру. Такое же сокращение вре мени модуляции происходит и при уравновешивании моста по другому п раметру. Кроме того, использование формирования положительных и отрицательных регулирующих воздействий отдельных каналов с фиксированными пробными изменениями уравновешиваю щих параметров на 30-50% - уменьшает время переходных процессов в усилительно-преобразовательном тракте моста. Все это позволяет повысить быстродействие приборов, построенных по предлагаемому способу, в два, три раза. Формула изобретения Способ уравновешивания автоматических модуляционных экстремгшьных мостов переменного тока с помощью регулирующих воздействий, формируемых по каждому из уравновешивающих параметров на основании модуляционных воздействий, получаемых посредством пробных положительных и отрицательных изменений соответствующего параметра измерительной цепи, отличающийс я тем, что, с целью повышения быстродействия моста за счет сокращения переходных процессов , положительное и отрицательное пробные изменения (модуляцию) яри формировании положительного и отрицательного регулирующих воздействий по уравновешивающему параметру осуществляют одновременно и фиксируют на время заданного цикла уравновешивания, а полученные положительное и отрицательное модуляционные воздействия раздельно векторно суммируют с . выходным напряжением мостовой измерительной цепи, а затем из полученных сумм порознь скалярно вычитают значение выходного напряжения этой цепи, первую полученную разность используют.в качестве положительного, а вторую - в качестве отрицательного регулирующих воздействий. Источники информации, принятые во внимание при экспертизе 1.Гриневич Ф.Ё. Автоматические мосты переменного тока, Новосибирск РИО, Сиб. отделение АН СССР, 1964, с. 130. 2.Авторское свидетельство СССР № 331319, кл. G 01 R 17/10, 27.07.70.