(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ
1
Изобретение относится к управлению многодвигательными электроприводами.
По основному авт. св. № 508886 известна система управления скоростными режимами электродвигателей, содержащая задатчики скорости, узел выбора-скорости, блок формирования темпа изменения эталонного напряжения скорости стана, узлы формирования уставки .скорости, избирательные элементы и делитель, а также системы регулирования скорости электродвигателей.
Недостаток указанного устройства заключается в том, что практически затруднительно обеспечить синхронное трогание и останов всех электродвигателей многодвигательного электропривода непрерывного стана холодной прокатки, что приводит к нарушению технологического процесса, а именно: обрыву прокатываемой полосы и чрезмерной перегрузке электродвигателей привода.
Цель изобретения - повышение точности синхронизации трогання и останова электродвигателей.
Указанная цель достигается тем, что предлагаемое устройство дополнительно снабжено тремя группами схем И, схемой
ИЛИ, блоками подсчета импульсов, блоком определения максимальной величины пути, выходом и входами связанным соответственно со вторыми входами первой и второй групп схем И, подключенных ко входам блоков регулирования скорости, первые и третьи выходы которых соединены с соответствующими входами первой и второй групп схем И, а вторые-- через третью группу схем И подключеиы к блокам подсчета импульсов, выходами соединенными со входами блока
fO определения максимальной величины пути, причем первые выходы блоков регулирования скорости подключеиы ко входам схемы ИЛИ, соединенной со вторыми, связлнными между собой, входами третьей группы схем И, а третьи входы первой группы схем И к первые входы второй группы схем И подключены соответственно к источникам внешней команды «разгон и «останов.
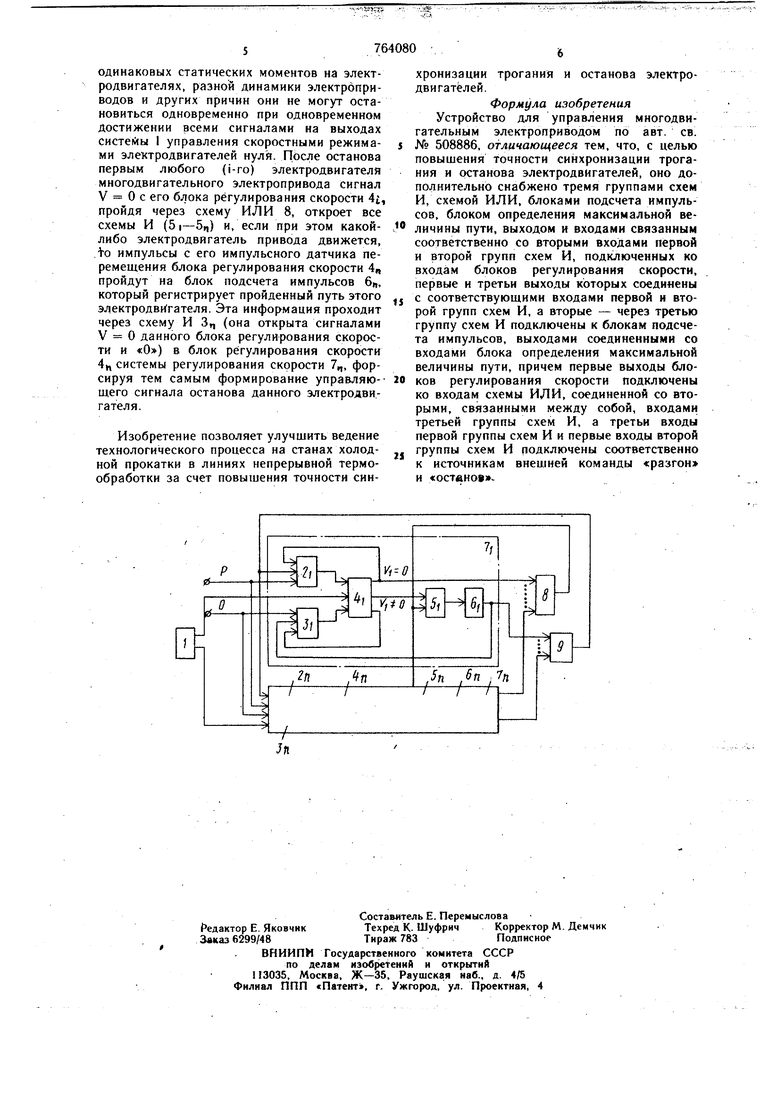
На чертеже представлена блок-схема устройства.. .
20 Устройство содержит систему 1 уттравления скоростными режимами электродвигателей, первую схему И 2i системы регулирования скорости первого электродвигателя, вторую схему И 3i системы регулирования
скорости первого электродвигателя, блок регулирования скорости 41 первого элект родвигателя, третью схему И 5i системы егулирования скорости первого электродвигателя, блок подсчета импульсов 6« системы регулирования скорости первого элект родвигателя, системы регулирования скорости с 2-го по п-ый электродвигатель , схему ИЛИ 8, блок 9 определения максимальной величины пути.
Схемы И (2,-2,) (3,-3,) (5,-5п), включенные в системы регулирования скорости (7i-7ц), являются обычными ключами, которые пропускают информацию при наличии разрешений на всех входах и выполнены на диодах и резисторах.
Блоки регулирования скорости (4i-4.,) представляют каждый систему, состоящую из электродвигателя с датчиками тока и скорости, источника питаний, регуляторов тока и скорости. Блоки подсчета импульсов () представляют собой обычные счетчики, например, двоичные.
Схема ИЛИ 8 является схемой собирания пропускает сигнал на выход при появлении его на любом из входов и выполнена на диодах. Блок 9 определения максимальной величины пути представляет собой устройство, которое поочередно сравнивает входные параллельные коды, выделяет и запоминает максимальное значение кода и состоит из входных ключей устройства сравнения кодов, статического регистра, логических элементов.
Система I управления СКбрбстными режимами соединена с каждым из вторых входов блоков регулирования скорости (4i- 4в), первый и третий входы которых связаны соответственно с выходами первых (2i- 2„) и вторых (3«-3ц) схем И.
Входы схемы ИЛИ 8 соединены с первыми выходами блоков регулирования скорости () и первыми входами первых схем И (2(-2), третьи входы последних соединены с внешней командой «разгон (Р), Выход схемы ИЛИ 8 ccfeflWffeirCoi Вторыми входами третьих схем И (), первые входы которых соединены со вторыми выходами блоков регулирования скорости (4 I-4п), а выходы - с входами соответствующих блоков подсчета импульсов (6|-6), Выходы блоков подсчета импульсов (6f-бп) соединены с соответствующими входами блока 9 определения максимальной величи ны пути и вторыми входами вторых схем И (3i-Зп), третьи входы которых подключены к третьим выходам блоков регулирования скорости (4i-4п), а первые входы - с внешней командой «останов (О). Выход блоТ а оёдинёнсб BTOfHJMtf fiStbsaMft первых схем И (2i-2„).
Устройство работает следующим образом
Система I упра1вЛе1нйясКбрЬСТнымн режимами электродвигателей обеспечивает выдачу задания выбранного уровня скорости
с заданным ускорением и соотношением скоростей в блоки регулирования скорости (4,-4„). . Во время работы любого (i-ro) электродвигателя многодвигательного электропривода его блок регулирования скорости 4 подает на третий вход схемы И 3j сигнал - скорость не равна нулю (). который открывает схему И 3i.
При остановленном электродвигателе его блок регулирования скорости 4;, подает на схему ИЛИ 8 и на первый вход соответствующей схемы И 2j сигнал - скорость равна нулкэ (V 0), который открывает схему И 2), и проходит через схему ИЛИ 8, открывая при этом схемы И (51-5).
Устройство работает в двух режимах - трогания н останова электродвигателей.
В режиме трогания электродвигателей многодвигательного электропривода на третьи входы первых .схем И (2i-2) систем регулирования скорости () поступает внешняя команда (Р) «разгон) и начинают увеличиваться с нуля сигналы с выходов системы 1 управления скоростными режимами электродвигателей, которые поступают на вторые входы блоков регулирования скорости (4i-4ц). Из-за неодинаковых статических моментов на электродвигателях, разной динамики электроприводов и других причин они не могут начать движение одновременно.
После трогания упомянутого электродвигателя имульсы с его импульсного датчика перемещения блока регулирования скоростн 4t. пройдут через схему И 5i (все схемы И 5i-5п открыты, если хотя бы один электродвигатель остановлен, так как сигналы V О, проходя через схему ИЛИ 8, открывают все третьи схемы И) на блок подсчета импульсов GI, который фиксирует пройденный путь. В блоке 9 определения максимальной величины пути регистрируется значение максимальной величины пути и с выхода подается на вторые входы схем И (2|-2п). Если какой-либо электродвигатель при этом не движется, то сигнал максимальной величины пути с блока 9 пройдет через схему И 2„ (она открыта сигналами V О данного блока регулирования скорости и «Р) в блок регулирования скорости двигателя 4 системы регулирования скорости 7я, форсируя трогание данного двигателя.
С началом движения электродвигателя схема И 2ч закрывается (так как V э 0) и блок регулирований скорости 4 ц переходит на рабочий режим.
В режиме останова электродвигателей на первые входы вторых схем И () систем регулирования скорости (7i-7г) поступает внешняя команда «О, а также начинайт уменьшаться до нуля сигналы с выходов системы I управления скоростными режимами электродвигателей. Из-за неодинаковых статических моментов на электродвигателях, разной динамики электроприводов и других причин они не могут остановиться одновременно при одновременном достижении всеми сигналами на выходах системы I управления скоростными режимами электродвигателей нуля. После останова первым любого (i-ro) электродвигателя многодвигательного электропривода сигнал V О с его блока регулирования скорости 4i, пройдя через схему ИЛИ 8, откроет все схемы И (5|-5ч) и, если при этом какойлибо электродвигатель привода движется, to импульсы с его импульсного датчика перемещения блока регулирования скорости 4|, пройдут на блок подсчета импульсов 6, который регистрирует пройденный путь этого электродв1 гателя. Эта информация проходит через схему И 3 (она открыта сигналами V О данного блока регулирования скорости и «О) в блок регулирования скорости 4, системы регулирования скорости 7, форсируя тем самым формирование управляющего сигнала останова данного электродвигателя.
Изобретение позволяет улучшить ведение технологического процесса на станах холодной прокатки в линиях непрерывной термообработки за счет повышения точности синхронизации трогания и останова электродвигателей.
Формула изобретения Устройство для управления многодвигательным электроприводом по авт. св. № 508886, отличающееся тем, что, с целью повышения точности синхронизации трогания и останова электродвигателей, оно дополнительно снабжено тремя группами схем И, схемой ИЛИ, блоками подсчета импульсов, блоком определения максимальной величины пути, выходом и входами связанным соответственно со вторыми входами первой и второй групп схем И, подключенных ко входам блоков регулирования скорости, первые и третьи выходы которых соединены с соответствующими входами первой и второй групп схем И, а вторые - через третью группу схем И подключены к блокам подсчета импульсов, выходами соединенными со входами блока определения максимальной величины пути, причем первые выходы блоков регулирования скорости подключены ко входам схемы ИЛИ, соединенной со вторыми, связанными между собой, входами третьей группы схем И, а третьи входы первой группы схем И и первые входы второй группы схем И подключены соответственно к источникам внешней команды «разгон
и «ОСТйНОв
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения электродвигателя | 1979 |
|
SU900390A1 |
| Многодвигательный электропривод | 1988 |
|
SU1628177A2 |
| Многодвигательный электропривод | 1983 |
|
SU1104632A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Способ управления частотой многодвигательного тягового электропривода | 1983 |
|
SU1121765A1 |
| Способ управления асинхронным электродвигателем лифта и устройство для его осуществления | 1988 |
|
SU1690159A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| Многодвигательный электропривод бумагоделательной машины | 1989 |
|
SU1698332A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ И РЕГУЛИРОВАНИЯ ПОТРЕБНОЙ МОЩНОСТИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ГОРОДСКОГО ЭЛЕКТРОТРАНСПОРТА | 2005 |
|
RU2292273C1 |
