Изобретение относится к электротехнике и может быть использовано в регулируемых асинхронных электроприводах подьемно-транспортных механизмов.
Цель изобретения - повышение производительности лифта.
На фиг. 1 представлена схема устройства для осуществления способа; на фиг. 2-4 - статические и динамические характеристики электродвигателя при различных моментах нагрузки; на фиг. 5 - 7 - диаграммы изменения скорости и режимов работы
электродвигателя при различных моментах нагрузки.
Устройство для управления асинхронным электродвигателем лифта содержит ти- ристорный преобразователь 1 напряжения и управляемый выпрямитель 2, первые входы которых подключены к источнику питающего напряжения, а выходы подключены соответственно к выводам обмоток высокой и низкой скоростей электродвигателя 3, датчик 4 скорости, соединенный с валом элект- родвигателя3,блок5
импульсного-фазового управления, первые
о ю о
ел ю
входы которого подключены к источнику питающего напряжения, распределитель 6 им- пульсов, первые выходы которого соединены с вторыми входами тиристорно- го преобразователя 1 напряжения, блок 7 переключения, первый вход которого соединен с первым выходом датчика 4 скорости, блок 8 управления, блок 9 задания скорости, блок 10 регулирования, первый вход которого соединен с первым выходом блока 8 управления, вторые входы которого соединены с первыми входами блока 9 задания скорости, а также содержит первый 11 и второй 12 узлы сравнения, функциональный преобразователь 13, первый выход которого соединен с вторым входом блока 5 импульсно-фазового управления. Второй вход блока 10 регулирования и первые входы первого 11 и второго 12 узлов сравнения объединены и подключены к первому выхо- ду блока 9 задания скорости, второй и третий выходы которого соединены соответственно с вторыми входами первого 11 и второго 12 узлов сравнения.
Третий вход блока 10 регулирования и второй вход блока 9 задания скорости объединены и подключены к второму выходу датчика 4 скорости. Первый выход блока 8 управления соединен с вторым входом блока 7 переключения, третий вход которого и первый вход блока 8 управления объединены и подключены к второму выходу функционального преобразователя 13, вход которого соединен с выходом блока 10 регулирования. Выходы первого 11 и второго 12 узлов сравнения соединены соответственно с вторым и третьим входами блока 8 управления, четвертые входы которого подключены к источнику внешних команд. Первые выходы блока 5 импульсно-фазового управления и блока 7 переключения подключены соответственно к первым и вторым входам распределителя б импульсов, вторые входы которого соединены с вторыми входами управляемого выпрямителя 2.
Устройство для управления асинхронным электродвигателем лифта работает следующим образом
В исходном состоянии на четвертых входах блока 8 управления отсутствует внешняя команда Д на начало движения и команды П и С требуемого направления движения, формируемые схемой автоматики лифта. Блок 8 управления на одном из вторых вы кодов формирует сигнал ИСХ, ус- танавливающий в нуль выходной сигнал (Узад блока 9 задания скорости. Блок 8 управления на перром выходе формирует сигнал УСТ О, который устанавливает в нуль
выходной сигнал Uy блока 10 регулирования и выходные сигналы В, Н и ДТ блока 7 переключения, которые поступают в распределитель 6 импульсов и запрещают появление на его первых и вторых выходах сигналов управления тиристорного преобразователя 1 и управляемого выпрямителя 2. При этом электродвигатель отключек от сети и удерживается механическим тормозом,
Для осуществления движения, например подъема кабины, автоматика лифта снимает механический тормоз и формирует команды Д и П, поступающие на четвертые входы блока 8 управления. Блок 8 управления снимает сигнал УСТ.О на первом выходе и формирует сигнал Р1 на разгон электродвигателя 3 до первого заданного значения угловой скорости ш . Блок 9 задания скорости на первом выходе формирует сигнал задания скорости (Уза д отражающий закон изменения скорости по оптимальной диаграмме, Формирование сигнала Одзад на участке разгона до первого заданного значения скорости установившегося движения осуществляется по следующим выражениям: (р (t) +р при 0 ед,зд ыд ,
р (t) 0 ПрИ Уд СУзад ЗД ,
р(1) -р При (DQ ОДзад С(Л , (1)
/(t) 0 ПрИ ГУзад Ы1.
E(t)}p(t)dt,
I
Мзад / Ј (t) d t ,
е СУД /2 р: ()- &/1 р.
На участке замедления сигнал задания формируется по следующим выражениям:
fp (t) р ПРИ УЕ ОЪад О) , I /«л л а. д а)Е
О WF , (2)
p(t)0 р(0 Р
Ј(t)j(t)dt
при при
I
,ГУзад М + / Ј(t)dt.
где
WF
0)Ј () t2
2р
2р
Знак сигнала задания скорости устанавливается в зависимости от сигнала ЗС, формируемого на одном из вторых выходов блока 8 управления. При подъеме ЗС 1, блок 9 задания скорости формирует положительный сигнал йЬад Сигналы заданных значений угловой скорости формируются нэ втором и третьем выходя4 блока 9 Блок 10
регулирования осуществляет сравнение заданной «Ъад и действительной скоростей и вырабатывает сигнал Uy, обеспечивающий замкнутой системе регулирования скорости астэтизм второго порядка по задающему и возмущающему воздействиям, что приводит к отработке двигателем заданной скорости и углового перемещения с нулевой статической ошибкой. Функциональный преобразователь 13 осуществляет определение знака сигнала управления, выделение его абсолютного значения и формирует на выходах сигналы Uy и sign Uy. В блоке 5 импульсно-фазового управления формируются импульсы определенной длительности, сдвинутые относительно нуля соответствующих фазных напряжений на угол а, пропорциональный сигналу j Uy j. Распределитель 6 импульсов осуществляет их распределение на соответствующие тиристоры преобразователя 1 и выпрямителя 2 в соответствии с сигналами В, Н, ДТ блока 7 переключения, которые формируются по следующим логическим выражениям:
В (slgnUy. s ) УСГГО.
H(slgnUyslgn а;дв). (3)
ДТ (,
где sign шлв сигнал, формируемый датчиком 4 скорости, причем sign шдв 1 при подъеме кабины.
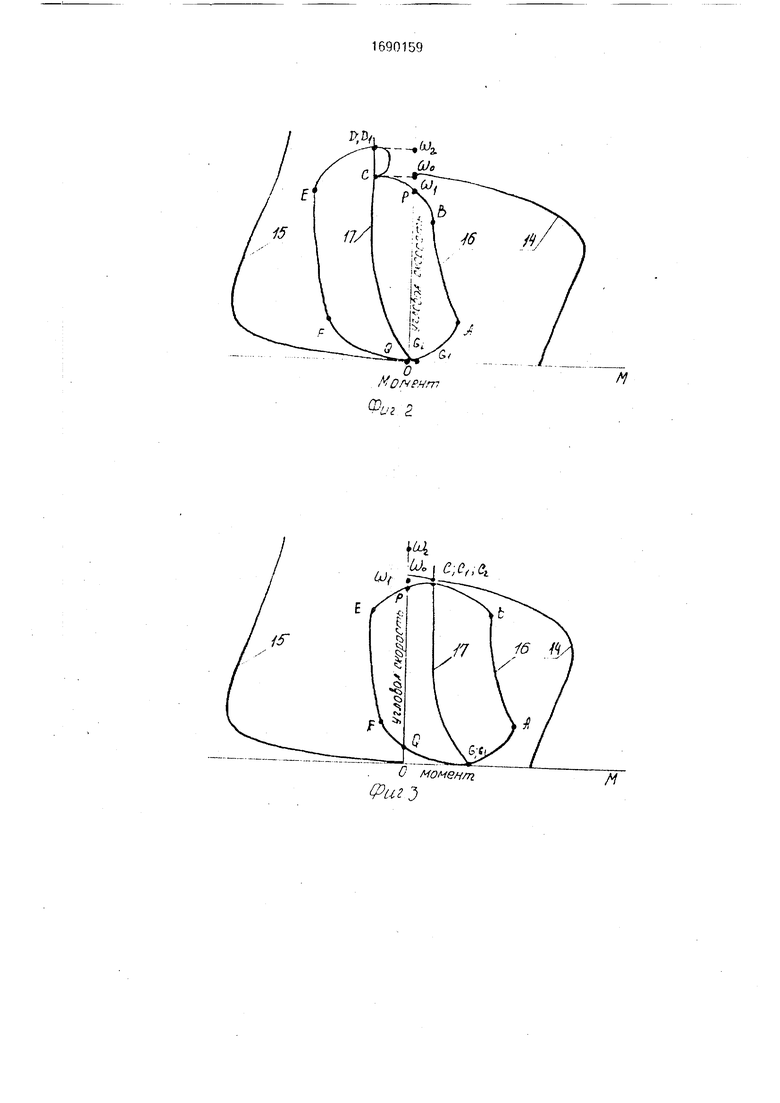
Угол включения тиристоров определяет величину подводимого к электродвигателю 3 напряжения, его момент и угловую скорость, которая изменяется в соответствии с сигналом (Узад , формируемым блоком 9 задания скорости. На фиг, 2 показаны статические механические характеристики 14 и 15 двигателя и его динамическая характеристика 16, соответствующая подъему пустой кабины по заданной диаграмме движения при характеристике 17 момента нагрузки. Естественная механическая характеристика 14 обмотки высокой скорости электродвигателя 3 и механическая характеристика 15 динамического торможения обмотки низкой скорости определяют допустимые области формирования двигательных и тормозных моментов электродвигателя 3. Разгон электродвигателя 3 до первого заданного значения угловой скорости а соответствует участкам GC на диаграмме 18 движения (фиг. 5), и динамической характеристике 16, (фиг. 2). В процессе разгона до точки Р электродвигатель 3 формирует двигательный момент, а затем знак требуемого момента изменяется. Разгон на участке PC диаграммы продолжается при работе двигателя 3 на регулировочных характеристиках
а
10
15
20
25
30
35
40
45
50
55
динамического торможения. По окончании разгона н ч и узел 11 сравнения вырабатывает логический сигнал Х1 - 1, а блок 8 управления при Х1 1 и aignUy О формирует на одном из вторых выходов сигнал Р2 на разгон двигателя до второго заданного значения угловой скорости аъ . По сигналу Р2 блок 9 задания скорости вычисляет сигнал задания скорости по выражению/J4(«зад «1 + ft t , (
где EZ - второе заданное значение углового ускорения, рад/с t Электродвигатель 3 разгоняется до второго заданного значения угловой скорости (ля с ускорением Г2 .
В точке D диаграммы оьад - и блок 8 управления вырабатывает сигнал на установившееся движение. Двигатель вращается с угловой скоростью О)дв ОУ1 .В точке DI на бпок 8 управления поступает команда НЗ от схемы автоматики лифта, свидетельствующая о нахождении кабины на заданном расстоянии до точки останова и о заданном угловом перемещении рю. до требуемой точки останова. Блок 8 управления формирует сигнал ЗАМ, па которому блок 9 задания скорости определяет угловое перемещение Начинает формироваться участок замедлений. В точке Q изменяется знак требуемого момента электродвигателя 3, Функциональный преобразователь 13 формирует логически: сигнал signUy 1, з блок 7 переключения - сигнал В, что приводит к изменению режима двигателя, как показано на диаграммах 19 и 20 (фиг. 5). При достижении кабиной точки останова схема автоматики лифта снимает команду на движение Д, команду направления движения П и накладывает механический тормоз на вал электродвигателя 3. Блок 8 управления формирует сигнал ИСХ, переводящий схему в исходное состояние.
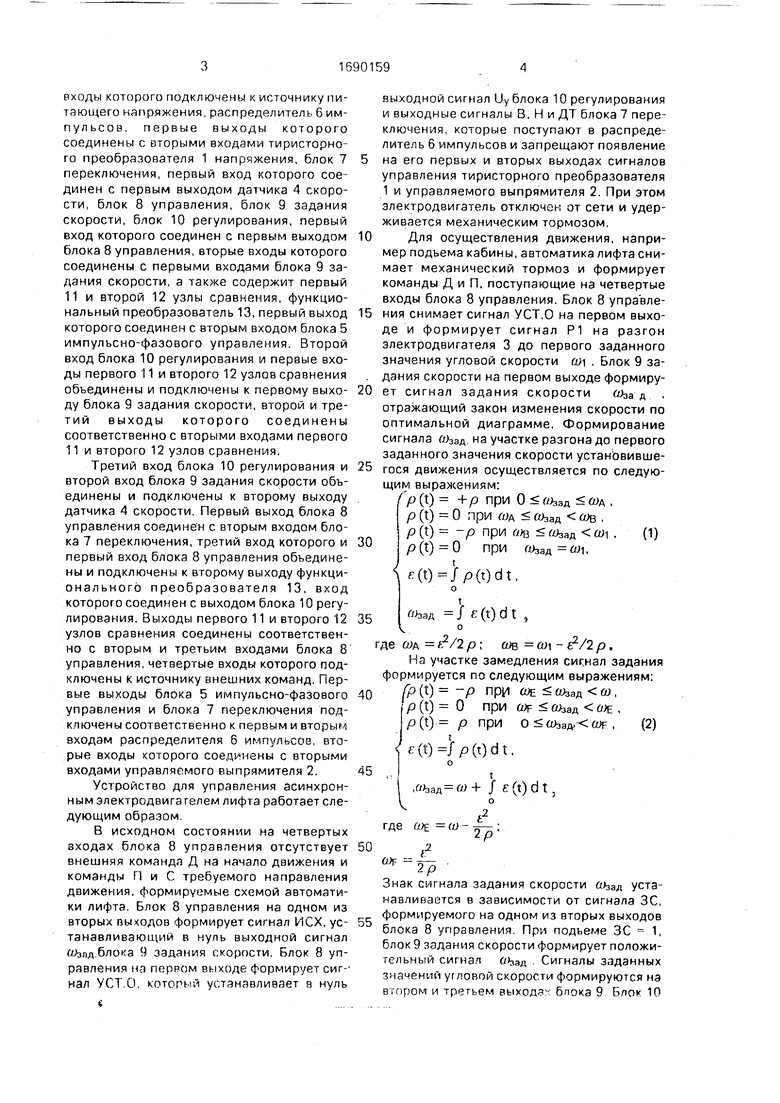
На фиг. 3, 6 и 4, 7 показаны характеристики двигателя и диаграммы движения, соответствующие полностью загруженной кабине и нагрузке, близкой к нулю, т.е. когда кабина и противовес находятся в состоянии, близком к уравновешенному.
Таким образом, данный способ и устройство позволяют повысить производительность лифта за счет увеличения скорости движения в установившемся режиме без ухудшения комфортности
Формула изобретения
1. Способ управления асинхронным электродвигателем лифта, при котором осуществляют разгон электродвигателя до первого заданного значения угловой скорости
установившегося движения, движение на установившейся скорости, при котором двигательные и тормозные моменты формируют при работе двигателя на регулировочных характеристиках обмоток высокой и низкой скоростей, замедление и останов в заданной точке, отличающийся тем, что, с целью повышения производительности лифта, по окончании разгона до первого заданного значения угловой скорости an определяют знак момента электродвигателя, при двигательном моменте продолжают движение с первым заданным значением угловой скорости WL при тормозном моменте разгоняют электродвигатель с заданным ускорением до угловой скорости, не превышающей второго заданного значения угловой скорости од , одновременно с поступлением команды на начало замедления измеряют угловую скорость двигателя а), продолжают движение с измеренным значением угловой скорости (О , в ходе которого измеряют угловое перемещение , указанное замедление в заданную точку останова осуществляют по диаграмме с заданными максимальными значениями первой и второй производных угловой скорости и начинают замедление при угловом перемещении Л 9 , величину которого определяют по формуле
Л „ - f;J2 0 , + (О , Јмакс ч
2v емакс + р где ЈМакс рмакс заданные максимальные значения первой и второй производных угловой скорости электродвигателя.
2.Способ по п. 1,отличающийся тем, что при разгоне электродвигателя до второго заданного значения угловой скорости од , осуществляемом с заданным ускорением, одновременно с изменением знака момента отключают электродвигатель от сети, измеряют его угловую скорость ш, сравнивают ее с вторым заданным значением угловой скорости од и при достижении угловой скоростью электродвигателя второго заданного ее значения од подключают электродвигатель к сети и увеличивают его тормозной момент до величины момента нагрузки.
3.Устройство для управления асинхронным электродвигателем лифта, содержащее тиристорный преобразователь напряжения
и управляемый выпрямитель, первые входы которых предназначены для подключения к источнику питающего напряжения, а выходы - для подключения соответственно к выводам обмоток высокой и низкой скоростей электродвигателя, датчик скорости электродвигателя, блок импульсно-фазового управления, первые входы которого предназначены для подключения к источнику питающего напряжения, распределитель импульсов, первые выходы которого соединены с вторыми входами тиристорного преобразователя напряжения, блок переключения, первый вход которого соединен с первым выходом датчика скорости, блок управления, блок задания скорости, блок регулирования, первый вход которого соединен с первым выходом блока управления, вторые выходы которого соединены с
первыми входами блока задания скорости, отличающееся тем, что, с целью повышения производительности лифта, в него введены первый и второй узлы сравнения, функциональный преобразователь,
первый выход которого соединен с вторым входом блока импульсно-фазового управления, второй вход блока регулирования и первые входм первого и второго узлов сравнения объединены и подключены к первому
выходу блока задания скорости, второй и третий выходы которого соединены соответственно с вторыми входами первого и второго узлов сравнения, третий вход блока регулирования и второй вход блока задания
скорости объединены и подключены к второму выходу датчика скорости, первый выход блока управления соединен с вторым входом блока переключения, третий вход которого и первый вход блока управления
0 объединены и подключены к второму выходу функционального преобразователя, вход которого соединен с выходом блока регулирования, выходы первого и второго узлов сравнения соединены соответственно с вто5 рым и третьим входами блока управления, четвертые входы которого предназначены для подачи внешних команд управления, первые выходы блока импульсно-фазового управления и блока переключения подклю0 чены соответственно к первым и вторым входам распределителя импульсов, вторые выходы которого соединены с вторыми входами управляемого выпрямителя.
а)дв
ф. «ф
I Х.« |
Внешние команды (3,f7,C,H3J
Фиг./
W,
О
№о/чрчт
®ы 2
V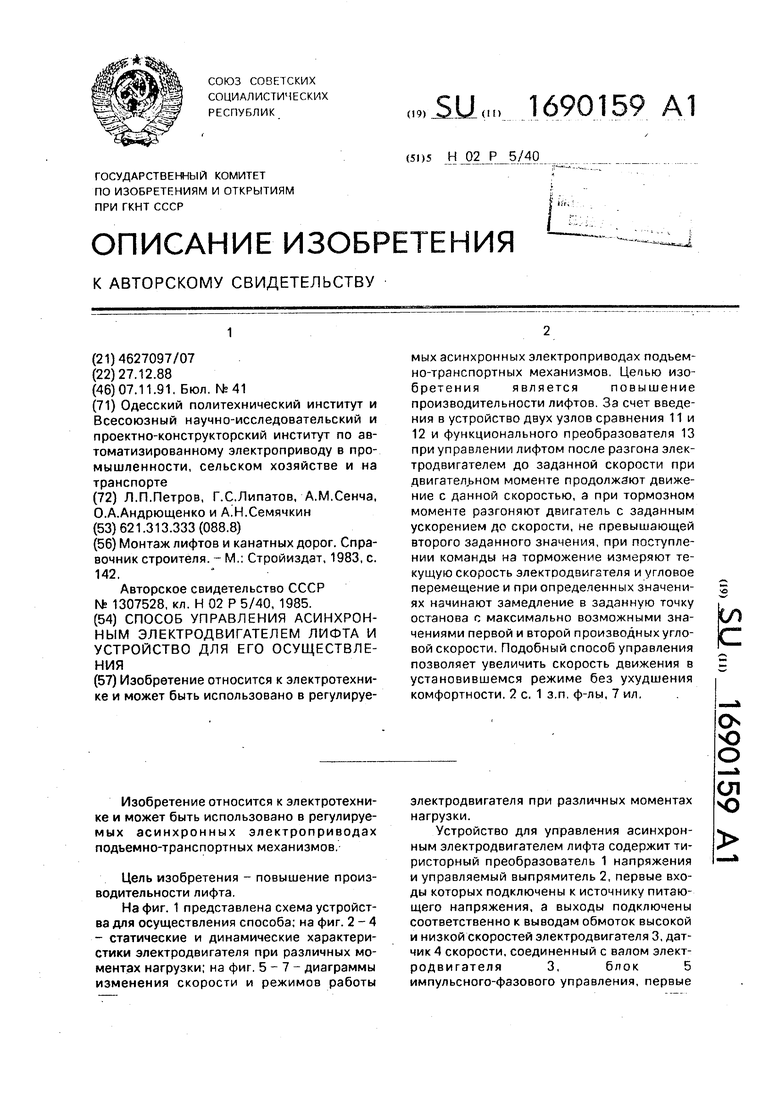

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для управления асинхронным электродвигателем с короткозамкнутым ротором и двумя независимыми статорными обмотками с различным числом полюсов | 1981 |
|
SU1030941A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Электропривод с оптимальным управлением | 1985 |
|
SU1339854A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1135002A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |


Изобретение относится к электротехнике и может быть использовано в регулируемых асинхронных электроприводах подъемно-транспортных механизмов Цепью изобретения является повышение производительности лифтов За счет введения в устройство двух узлов сравнения 11 и 12 и функционального преобразователя 13 при управлении лифтом после разгона электродвигателем до заданной скорости при двигател.ьном моменте продолжают движение с данной скоростью, а при тормозном моменте разгоняют двигатель с заданным ускорением до скорости, не превышающей второго заданного значения, при поступлении команды на торможение измеряют текущую скорость электродвигателя и угловое перемещение и при определенных значениях начинают замедление в заданную точку останова с максимально возможными значениями первой и второй производных угловой скорости. Подобный способ управления позволяет увеличить скорость движения в установившемся режиме без ухудшения комфортности. 2 с. 1 з.п. ф-лы, 7 ил. со с
О момент ФигЭ
О
момент
Риг.2
J Ъ
Фиг.5
Р
Риг 6
D J),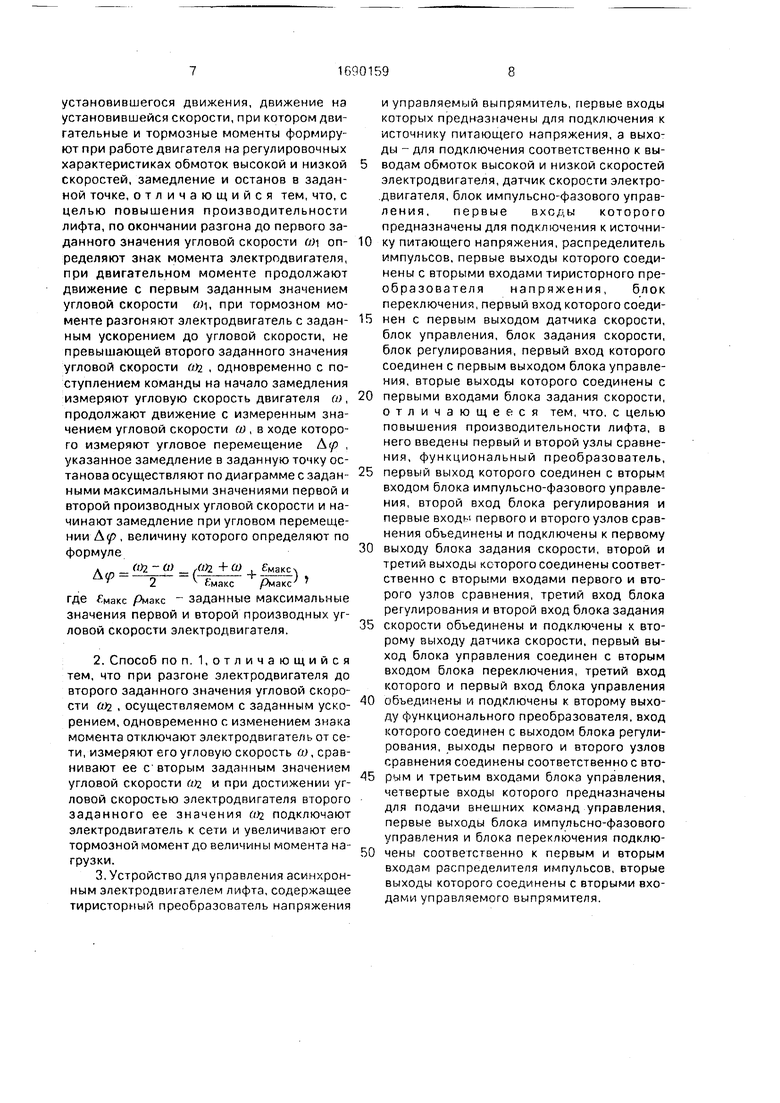
| Монтаж лифтов и канатных дорог | |||
| Справочник строителя | |||
| - М.: Стройиздат, 1983, с | |||
| Рогульчатое веретено | 1922 |
|
SU142A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
