(54) СИСТЕМА ОБНАРУЖЕНИЯ ЗАСТРЕВАНИЯ СОСУДА
1
Изобретение относится к горнодобывающей промышленности и касается конструирования систем обнаружения застревания сосуда в стволе шахты.
Известна система обнаружения застревания сосуда в стволе шахты, содержащая силоизмерительный датчик, формирующий сигнал, пропорциональный нагрузке на канат, задатчик установки срабатывания защиты по напуску каната и блок компенсации веса каната, выходы которых связаны с сумматором, подключенным к усилителю, а также блок направления движения сосуда, управляющий вход которого связан с приводом подъемной машины 1.
Однако такая система имеет низкую надежность в работе и недостаточную защиту от помех.
. Цель изобретения - повыщенне надежности в работе и помехозащищенности.
Это достигается тем, что система снабжена коммутатором и дополнительным задатчнком установки срабатывания защиты по перегрузу каната, причем с сумматором выход каждого В СТВОЛЕ ШАХТЫ
задатчика соединен через управляемые вход и выход блока направления движения сосуда, а коммутатор выполнен С управляющим и управляемым входами и выходом, при этом управляющий вход связан с одним из выходов блока направления движения сосуда, управляемый вход - с выходом сумматора, а выход с входом усилителя.
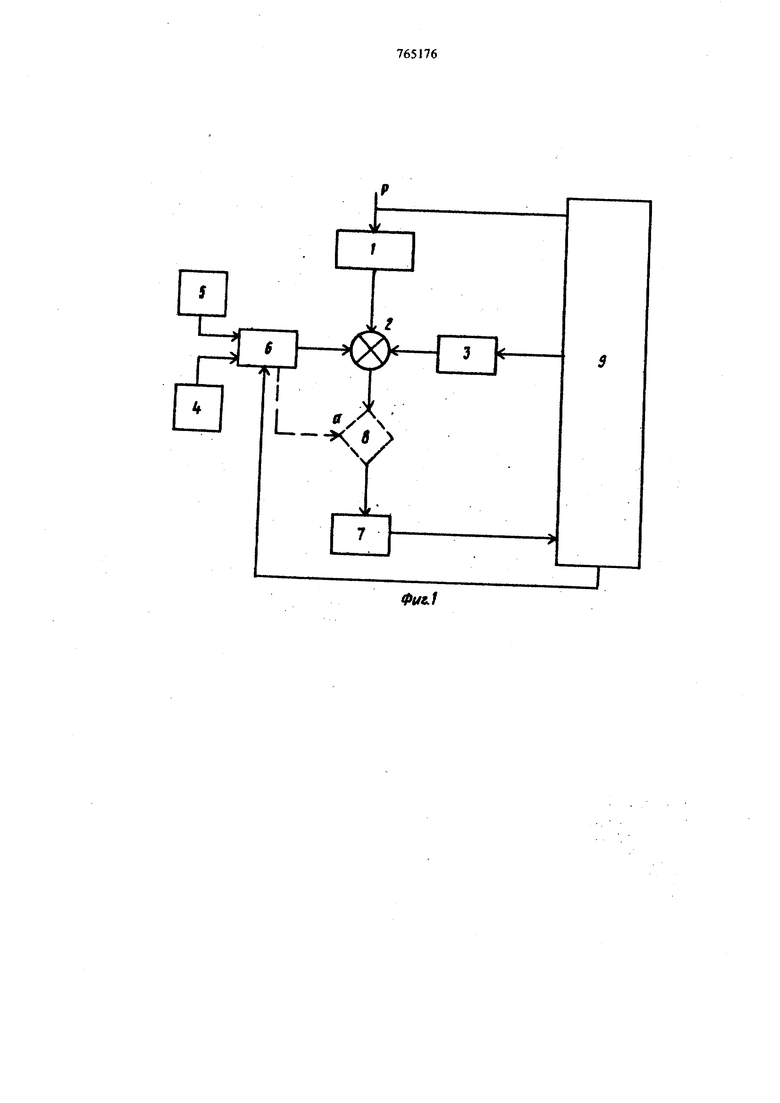
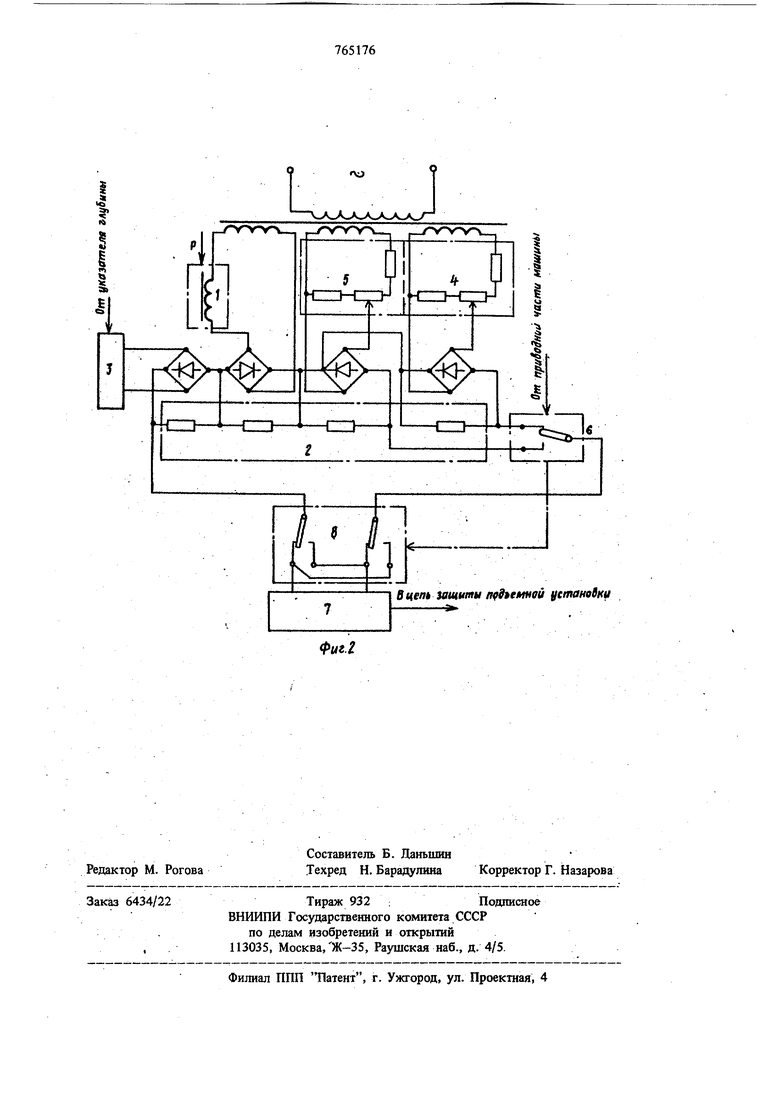
На фиг. 1 дана функциональная схема системы; на фиг. 2 - один из возможных вариантов реализации предлагаемой системы с обработкой сигналов на постоянном токе.
Система обнаружения застревания сосуда в стволе содержит силоизмерительньш датчик 1, формируюащй сигнал, пропорциональный нагрузке на канат, алгебраический сумматор 2, блок 3 компенсации веса каната, задатчик 4 уставки срабатывания по напуску и дополнительный задатчик 5 установки срабатывания защиты по перегрузу каната, блок 6 направления движения сосуда и усилитель 7 с релейным выходом.
Кроме зтого, при обработке сигналов на постоянном токе в систему на входе усилителя 7
включается коммутатор 8 (см. фиг. 2, блоки выделены пунктирными линиями).
Система работает следующим образом. Сигнал с датчика 1, установленного, наприме под опорой подшипника копрового шкива, поступает на вход сумматора 2, другие два входа которого связаны соответственно с блоком 3 компенсации веса каната и задатчиком 4 (или 5), подключаемым к сумматору ipn ходе сосуда вниз (вверх) блоком 6 направления через управляемый вход, выход (а) последнего Управляющий вход блока 6 направления связан с приводной частью подъемной машины электрически (например, со схемой управления) или механически (например, с валом барабана подъемной машины).
Коммутатор 8, включаемый на входе усилителя 7, если обработка сигналов производится на постоянном токе, предназначен для инвертирования входа усилителя в моменты переключения задатчиков 4 и 5 при изменении направления движения сосуда. Управляющий вход (а) коммутатора 8 связан с одним из выходов блока 6 направления, управляемый вход - с выходом сумматора 2, а выход коммутатора соединен с входом усилителя. Коммутатор представляет собой переключающее устройство (преимущественно, бесконтактное). Время переключения коммутатора 8 и блока 6 направления выбирается меньше времени отпускания выходного реле усилителя 7.
Блок 6 направления движения сосуда предназначен для подключения к сумматору 2 задатчика 4 или 5 поочередно (в зависимости от направления движения сосуда). В качестве блока 6 направления может быть использовано реле в цегги .управления подъемной машиной, состояние которого однозначно определяется направлением движения сосуда. Если таких реле в схеме подъема нет, то блок 6 может быть вьшолнен в виде специального датчика. Коммутационные элементы блока 6 могут быть как контактными, так и бесконтактным
Для наглядности на фиг. 2 коммутатор 8 и блок 6 направления движения сосуда показаны в виде контактных групп.
При ходе сосуда вниз, когда напуск каната оказывается возможным, блок 6 направления удерживает подключенным к сумматору 2 задатчик 4 уставки срабатывания защиты по напуску каната. При этом коммутатор 8 находится в состоянии, когда поступающий на вход усилителя сигнал подается, например, в положительной полярности и выходное реле усилителя 7 (при нормальной работе) притянуто. Застревание опускающего сосуда приводит к уменьшению усилия Р, прикладываемого к датчику 1,и падению его выходного сигнала .-В связи с этим результирующий сигнал, поступаюший на вход усилителя, достигает (с учетом коэффициента усиления) уровня отпускания выходного реле последнего, что и является сигналом аварийного состояния.
При изменении направления движения сосуда на обратное (ход вверх) напуск каната становится невозможным, а перегруз (из-за застревания сосуда) - возможным. Поэтому блок 6 направления отключает задатчик 4 (по напуску) и подключает задатчик 5 (по перегрузу) . . Одновременно он выдает управляющий сигнал на коммутатор 8 (если таковой задействован в системе обнаружения застревания). Последний в короткое время (недостаточное для отпадания выходного реле усилителя) инвертирует вход усилителя, после чего система работает в режиме контроля перегруза каната.
При застревании поднимающегося сосуда усилие Р, прикладываемое к датчику 1, уменьшается. Убывающий пропорционально выходной сигнал датчика через сумматор 2 поступает на вход усилителя 7. По достижении заданного (посредством задатчика 5) уровня выходное реле усилителя 7 отпадает и выдает сигнал в цепь защиты подъемной машины 9.
Формула изобретения
Система обнаружения застревания сосуда в стволе щахты, содержащая силоизмерительный датчик, формирующий сигнал, пропорциональный нагрузке на канат, задатчик установки срабатывания з1ащиты по напуску каната и блок компенсации веса каната, выходы которых связаны с сумматором, подключенным к усилителю, а также блок направления движения сосуда, зттравляющий вход которого связан с приводом подъемной машины, отличающаяся тем, что, с целью повышения надежности в работе и помехозашищенноста, она снабжена коммутатором и дополнительным задатчиком установки срабатывания защиты по перегрузу каната, причем с сумматором выход каждого задатчика соединен через управляемые вход .и выход блока направления движения сосуда, а коммутатор вьшолнен с управляющим и управляемым входами и выходом, при этом управляющий вход связан с ОДНИ из выходов блока направления движения сосуда, управляемый вход - с выходом сумматора, а выход - с входом усилителя.
Источники информации, принятые во внимание, при экспертизе 1. Аппарат защиты шахтных подъемных установок от напуска каната и перегруза, ЛЗСП-2. Киевский институт автоматики, 1974 (прото- i тип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система обеспечения аварийного останова грузоподъемной машины | 1979 |
|
SU905181A1 |
| Устройство для защиты шахтной подъемной установки при заклинивании подъемного сосуда в стволе | 1978 |
|
SU977348A2 |
| Система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе | 1977 |
|
SU679504A1 |
| Устройство защиты от напуска каната при застревании подъемного сосуда в стволе | 1978 |
|
SU948825A1 |
| Устройство защиты от напуска каната при застревании подъемного сосуда в стволе | 1979 |
|
SU861266A1 |
| Устройство для защиты от напуска каната при застревании подъемного сосуда в стволе | 1984 |
|
SU1255540A2 |
| Система защиты шахтных подъемных установок при застревании сосудов в стволе | 1978 |
|
SU698894A1 |
| Устройство для контроля скорости движения сосуда подъемника | 1983 |
|
SU1146270A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Система автоматического контроля и защиты шахтной подъемной установки от напуска каната при зависании подъемного сосуда | 1987 |
|
SU1570989A1 |