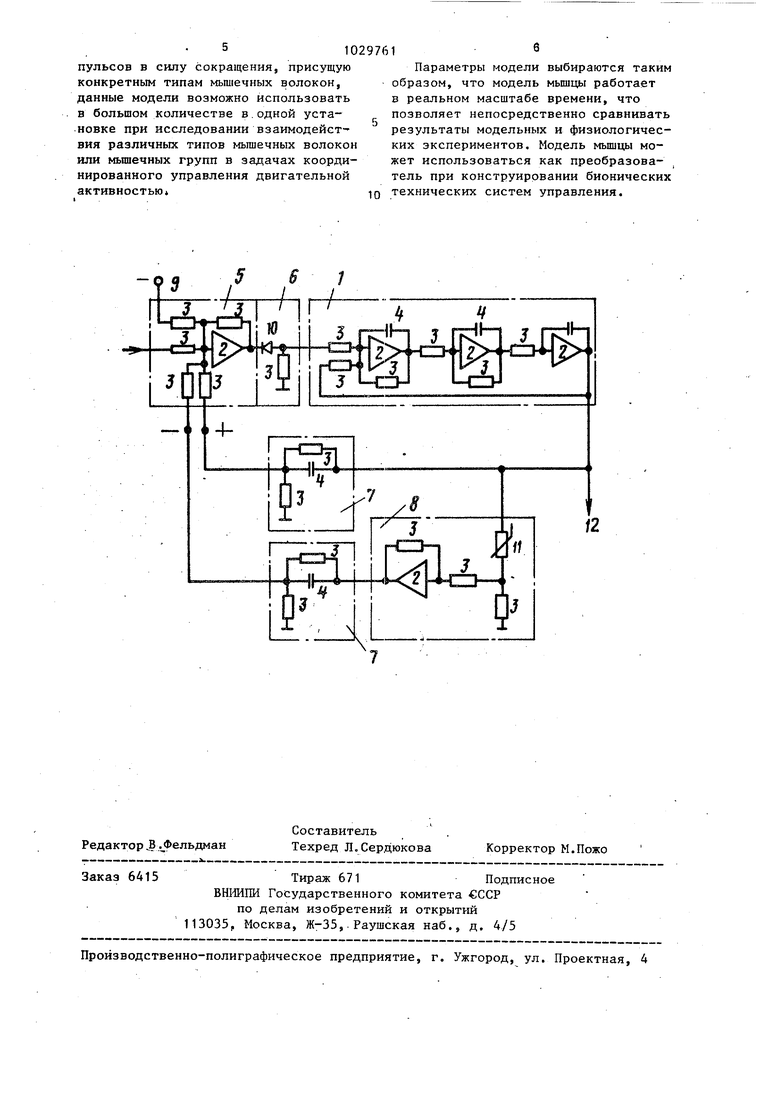
Изобретение относится- к области моделирования биологических систем и может использоваться как объект при исследовании нейтрональных меха низмов управления мышечным сокращением. Известны различные модели мышцы, представленные набором упругих и вязких элементов, и математические модели, воспроизводяпще особенности сокращения мьшечных волокон. Существуют модели мьшцы, воспроизводящи функциональные.свойства мышцы с помощью передаточных функций. Наиболее близким техническим решением к изобретению является модел . мышцы содержащая блок злектромеханического преобразования, выполненг ный в виде п последовательно соеди ненных интеграторов с сопротивления ми в цепях обратной связи, нелинейный элемент и блок умножения, один из входов которого является входом Модели мьш1цы, другой вход присоединен к выходу нелинейного элемента, а выход к входу первого интеграто ра, выход последнего интегратора является выходом модели и соединен с входом нелинейного элемента. Недостатком прототипа является сложность реализации модели из-за применяемых блоков умножения и нели нейности, характеристику котор1ой не обходимо набирать на диодно-г зистив- 35 ных элементах. Переход к набору-нелинейной зависимости, присущей другому типу мьш1ечного волокна, требует перестройки всех диодно-резистивных элементов, количество которых определяется задаваемой точностью линейно-кусочной аппроксимации воспроизведения физиологической характеристики. Трудность перестройки нелинейной зависимости не позволяет исследо .вать на одной модели характеристики преобразования входного импульсного потока в выходное напряжение сокращения, присущее различным типам мьшц. В модели не учтены также динамические характеристики изменения силы сокращения, связанные со скоростью изменения входного импульсного потока. Все это сужает область при(менимостимодели при излучении механизмов развития силы реальных мьшц. Целью изобретения является повьш1е ние точности моделирования и упрощение конструкции модели. 12 Эта цель достигается тем, что в модель мышцы, содержащую блок формирования параболического напряжения и блок моделирования функции электромеханического преобразования мьпиечного волокна, выполненный из п последовательно соединенных интегрирующих усилителей, причем в обратную связь ()ых интегрирующих усилителей включен резистор, выход последнего интегрирующего усилителя является выходом модели и соединен с входом блока формирования параболического напряжения и с первым входом первого интегрирующего усилите|Ля блока моделирования функции электромеханического преобразования мышечного волокна, введены два пропорционально-дифференцирующих звена, сумматор и пороговый элемент, причем первый и второй входы сумматора являются соответственно информационным и установочными входами модели, третий и четвертый входы сумматора подключены к выходам пропорционально-дифференцирующих звеньев, выход сумматора через пороговый элемент соединен со вторым входом первого интегрирующего усилителя блока моделирования функции электромеханического преобразования мышечного волокна, вход первого пропорционально-дифференцирующего звена подключен к выходу модели мьш1цы, а вход второго пропорционально-дифференцирующего звена соединен с выходом блока формирования параболического напряжения. Структурная схема модели мьпицы из ображена на чертеже, содержащая блок 1 моделирования функции электромеханического преобразования мышечного волокна, интегрирующие усилители 2, резисторы 3, конденсаторы 4, сумматор 5, пороговый элемент 6, пропорционально-дифференцйрующие звенья 7,блок 8 формирования параболического напряжения, вход 9, устанавливающий начальный уровень возбудимости 1МЬЩ1ечного волокна,, аналог мембранного потенциала, диод 10 и варистор 11. Величины резисторов 3 в блоке 1 определяют вид кривой одиночного сокращения, сумматор 5 и пороговый элемент, моделирующий электровозбудимые свойства мышечной мембраны, звенья 7 и блок 8 моделируют свойство мьш1ечных мембран изменять уровень возбудимости в зависимости от силы и скорости ее изменения. Модель работает следующим образом В исходном состоянии, в отсутстви импульсов на входе модели, на выходах всех блоков напряжение равно нулю. При .поступлении на вход модели импульсов постоянной амплитуды и длительности, их амплитуда сравнивается с пороговым значением напряжения, устано9ленным по входу 9 сумматора 5 и порогового элемента 6, моделирующих электровозбудимые свойства мышечной мембраны, и превышающая пороговое значение амплитуды входного импульса воздействует на вход первого интегрирующего усилител блока 1, моделирующего функцию электромеханического преобразования, на выходе которого формируется напря жение, соответствующее кривой разв11тия силы сокращения реальной мьшпда. Напряжение с выхода модели мьшцы поступает на вход звена 7 и блока 8, моделируннцих свойство мышечных мембФан изменять уровень возбудимости, и в соответствии с параметрами каждо го дифференцирующего звена и пропорциональной составляющей входного сиг нала напряжения на выходах звеньев 7 изменяют исходный уровень порогового сигнала, моделирующего электровозбудимые свойства мышечной мембраны. Для звеньев 7 и блока 8, моделиру ющих свойство мышечных мембран изменять уровень возбудимости от силы сокращения и скорости его изменения, передаточная функция запишется в вид :) -А - К-НГ т1 + Т,Р где К коэффициент передачи постоянной составляющей для каждого звена 7, величина активности силы сокращения на выходе 12 модели мышцы. Параболическая зависимость А силы сокращения при втором члене передаточной функции обеспечивается варистором 11. Существенным для моделирования является то, что напряжения на выходе звеньев 7 суммируются в сумматоре 5, моделирующем электровозбудимые св10йства мышечных мембран с разными коэффициентами, которые в конечном виде и определяют закономерность преобразования интенсивности входного импульсного потока в силу сокращения мьшнда, т.е. изменени порогового уровня .ли будет происхосоответствии с решением уравдить в нения К - W. (р) ..А-Кг,{р)А . dU Если К 7 С , то, когда сила сокращения невелика ( при малых часто- тах следования импульсов на входе модели), превалирует первый член уравнения и увеличивается возбудимость a)ШIeчнoгo волокна, так как снижается порог и вырастает превышение амплитуды входного импульса над исходным уровнем мембранного потенциала, следствием .чего является превышение силы сокращения на 2,3 и 4 импульса, столь характерное для реальных мышц. При дальнейшем увеличении частоты следования импульсов сила сокращения достигает такого значения, что возрастает влияние второго члена уравйения, и эффективность возбуждения начинает падать из-за увеличения порога, т.е. снижения амплитуды импульса на выходе элемента 6, воздействующего на блок 1, моделирующего функцию электромеханического преобразования. . Таким образом, изменением величины коэффициентов К и К легко подбирается на модели характеристика преобразования интенсивности входного импульсного потока в силу активного сокращения, характерную для различных типов мышцы. Коэффициенты в передаточных функциях С звеньев 7 позволяют воспроизвести в модели динамические характеристики изменения свойств мышечных мембран, присущие тоническим или фазическим, быстрым или медленным мьш1ечным волокнам. . Таким образом, с помощью введен-г ных узлов с соответствующими характеристиками преобразования входных сигналов и их структурных связей промоделировано свойство мышечного волркна изменять характеристики электровозбудимости мембран в засисимости от силы сокращения, что позволило воспроизвести средствами моделирования закономерность преобразованйя входного импульсного потока в силу сокращения. Использование типовых звеньев в передаточных характеристиках делает модель легко воспроизводимой, а использование современных операционных усилителей для реализации этих звеньев малогабаритной. Кроме легкости настройки модели для реализации характеристик преобразования частоты следования
пульсов в силу сокращения, присущую конкретным типам мышечных волокон, данные модели возможно использовать в большом количестве в.одной установке при исследовании взаимодейст ВИЯ различньк типов мьпиечных волокон или мышечных групп в задачах координированного управления двигательной активностью
1б
Параметры модели выбираются таким образом, что модель мьшшы работает в реальном масштабе времени, что позволяет непосредственно сравнивать результаты модельных и физиологических экспериментов. Модель мьшлцы может использоваться как преобразователь при конструировании бионических технических систем управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модель мышцы | 1983 |
|
SU1164746A1 |
| Модель рецептора-мышечного веретена | 1987 |
|
SU1511752A1 |
| Устройство для моделирования нейронных структур двигательного аппарата | 1986 |
|
SU1585809A1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| Модель мышцы | 1978 |
|
SU765825A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СИСТЕМ | 1990 |
|
RU2050019C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ НЕЙРОНА | 1970 |
|
SU272681A1 |
| Импульсных усилитель | 1988 |
|
SU1697091A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Модуль популяции нейронов | 1989 |
|
SU1732356A1 |
МОДЕЛЬ МЫШЦЫ, содержащая блок формирования параболического напряжения и блок моделирования функции электромеханического преобразования мышечного волокна, выполненный из п последовательно соединенных интегрирующих усилителей, причем в обратную связь () х интегрирующих усилителей включен резистор, выход последнего интегрируняцего усилителя является выходом модели и соединен с входом блока формирования параболического напряжения ji с первым входом первого интегрирукицего усилителя блока моделирования функции электромеханического преобразования мышечного волокна, о т л ичающаяся тем, что, с целью повьпнения точности моделирования и упрощения конструкции, она дополни- , тельно содержит два пропорциональнодифференцирующих звена, сумматор и пороговый элемент, причем первьй и второй входы сумматора являются соответственно информационным и установочными входами модели, третий и четвертый входы сумматора подключены соответственно к выходам пропорционально-дифференцирующих звеньев, , выход сумматора через пороговый эле(Л мент соединен с вторым входом первого интегрирзпощего усилителя блока моделирования функции электромеханического преобразования мышечного волокна, вход первого пропорциональнодифференцирующего звена подключён к выходу модели мышцы, вход второго IND пропорционально-дифференцирующего звена соединен с выходом блока формиvl рования параболического напряжения. а
| Принг Дж | |||
| Модель мышцы | |||
| В сб | |||
| Моделирование в биологии, М.,1963, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Модель мышцы | 1978 |
|
SU765825A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР | |||
| Модель мышцы | 1978 |
|
SU734798A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
