(54) ТЕЛЕСКОПИЧЕСКИЙ КОНВЕЙЕР М;Ш
1,2
Изобретепие относится к области подъемно-транспортного ма,ши.но€Троен.ия, а именно к телескопическим «ойвейерам, используемым п-ри проходке выработок и добычных работах..
Известен телескопический ленточный колвейер, содержащий грузонесущую ленту, опирающуюся на ролнКбШбрьтГустайОв-: ленные на раздвижном ставе, -несущем концевые блоки, один из которых вЫйол- нен приводным, а другой - натяжным. Конвейер имеет устройство, ,. обеспечивающее «омпенсацию слабины ленты при укорачивании конвейера fl.
Одчагко зйонструкция «конвейера сложна требует значительных затрат , времени, необход{1мого л а праьедение операций по выдвижению или укорачиванию конвейера. Известен также телескопический конвейер, содержащий грузонесущий орган -с рабочей и холостой ветвями, огибающий концевые блоки, один из которых установлен на неподвижной раме, а другой -на выдвижной раме 12.
Однако, такой конвейер, благодаря наличию /устройства, необходимого для компенсации слабины грузонесущего органа, имеет сложную конструкцию и большие габариты конвейера в сложенном состоянии. Недостатком конвейера является . так.,.„„„,.J,-..,.,:; ,-..,„
же трудоемкость операций по укорачиванию или увеличению его длины при ведении добычных или проходческих работ.
Целью настоящего изобретения являет5 ся упрощение к(нструк.Цйй конвейера.
Для этого, грузонесущи-й орган снабжен роЛИк мй, 3 1концёвь1е блоки выполнены с стазами для роликов и снабжены криволинейныминаттравляющймйдля фиксации ро10 ликов на блоках, при этом .выдвиждая рама имеет па)раллеЛьйЪ раЙ направляЮщйе, мё:ж|(ук6т6рь1мй .размёщёны ролики холостой ветви, грузонесущего , а концевой блок, установленный на 15 неподвижной раме, имеет тормоз.
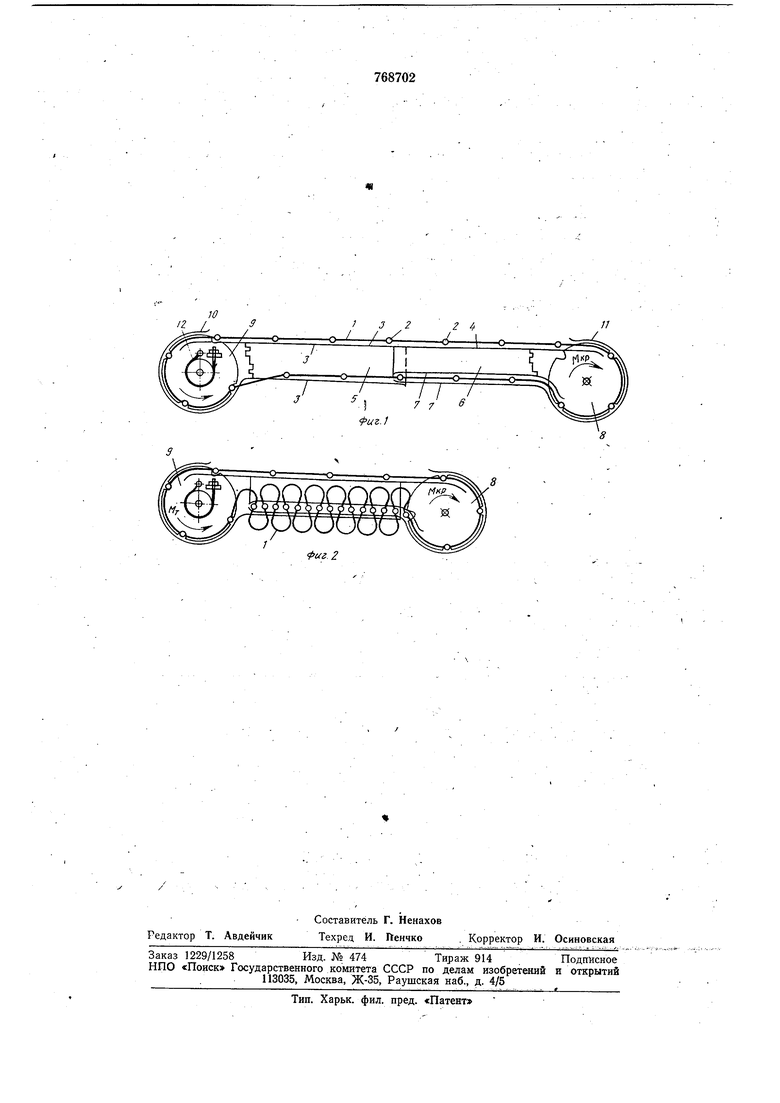
На фиг. i изображен общий вид жонвейера в выдвинутом положении; на фиг. 2 - то же, во вд)аинупо1м поД ожании.
Телескопический конвейер состоит из 20 гибкого грузонесущего органа (например), в виде ленты /, которая имеет укрепленнГые по ее краям 2, опирающиеся на направляющие 3 и 4. Направляющие 3 уста нЬвлены на нецоДвижной раме 5, а направ25 ляющие 4 на выдвижной раме 6. Рама 6 имеет «а холостой ветви ленты / параллельно расположенные направляющие 7. Конвейерная лента 1 огибает концевые блоки .5 и 9, причем бло1к 8 выполнен при30 водным. Блоки 8 и 9 выполнены с пазами для размещения в них роликов 2 ленты / и имеют криволинейные направляющие 10 и //, которые фиксир|уют ролики 2 в пазах. Блок 9 имеет тбрмоз, например; ленточный.Работа конвейера. (При создании крутящего момента на приводной блок 8 ра-бочая ветвь ленты / перемещается .в направлении от блока 9 к блоку 8 с уоилием ватяже|Н1ия, зашйсящнм от тормозного момента на блоке 9 и сопро-тивления движению всей ленты 1. Необходимый тормозной момент создается, например ленточны.м тормозом 12. Слабина на холостой ветви ленты 1 преобразуется в петли, йерёМеЩаемые вместе с-роликами 2 по нижним направляющим 7 рамы бс меньшим щагом, нежели на рабочей ветв. Приложением тормозного момента достигается соответствующее натяжение рабочей ветви (при осла бленной холостой). Эти факторы находятся между собой во взаимосвязи: . -. - где РН - усилие натяжения; УИкр - крутящий момент; М - тормозной момент-; ,,,;..,. Лприв, т - радиусы концевых блок:ов; Р сопр - сопротйвЛёййё дВййШйю Tie н -,, .:.. .. . . : -- -Максимально раздвинутый конвейер, когда рабочая иГОлЬ стая вётй Г 1ГатгЖуты, работает как обычный конвейер. В этом случае тормоз ./I от1ключен. - -Таким обраГ611: прГ ЙЗлГе Гй1Г113Гйны конвейера перем-ещают раму 6, вследствие чего у1величивается или укорачивается длила рабочей йетви рузонерущего органа, а петли его холостой ветви, размеи,еннь1е на нижних направляющих 7, меняют свой шаг и высоту. Причем, чтобы пр-и движении не образовывалось хаотического нагроможделия петель друг на друга, вследствие отрыва роликбв от направляющих, последние .выполнены с полузамкнутым профилем, охватывающим ролик сверху и снизу, швеллерного типа (ла -чертежах не показано). ГрузонесущИй орган .коивейбра .может быть выполнен в виде отрезков, соединенных между собой или непосредственло, или с помощью гибких СБЯзей (например, пластинчатый конвейер с несущим полот:ном из пластин с роликами и тяговой цепью, соединяющей эти пластины). Это позвО|Лит из пибать колвейер в горйзонталь.ной плоскости. В таком телескопическом конвейере цри его укорачивании компенсация слабины на хойостой ветви происходит за счет наложения отрезков друг на друга или свободного провисания на роликах в нижних направляющих става. Формула .и 3-0 бр е те.н и я Телескопический конвейер, содержащий гибкий грузонесущ.ий .орган, с рабочей и холостой ветвями, огибающий концевые блоки, один из которых установлен на неподвижной раме, а другой - на выдвижной раме, отличающийся тем, что, с целью упрощения конструкции конвейера, гр|узонесущий орган снабжен роликами, а концевые блоки выполнены с .пазами для роликов и снабжены криволинейными напра ляющими для ф.иксации роликов на Ьлойах, при этом выдв.ижная рама имеет параллельно расположенные направляющие,между которыми размещены ролики холбстой ветви грузонесущего. органа, а конЦевой блок, установленный на неподвйжЬбй раме, имеет тормоз. .. -Источники информации, принятые во внййание при э.кспертизе: I. Патент США № Э664488, .кл. 198-139,, . 10.|04.712. 2. Авторское свидетельство СССР № 486978, кл. В 65 G 16/06, 03.0б.72 (прототип) . 
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| ТЕЛЕСКОПИЧЕСКИЙ ТРАНСПОРТЕР | 1991 |
|
RU2036125C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279389C1 |
| ТЕЛЕСКОПИЧЕСКИЙ КОНВЕЙЕР | 1973 |
|
SU389994A1 |
| Телескопический ленточный конвейер | 1979 |
|
SU825394A1 |
| Телескопический конвейер | 1982 |
|
SU1022885A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| Телескопический конвейер | 1981 |
|
SU1027106A1 |
.i Г - ГГ7
7 7
