IND ю
сх
00
сд Изобретение относится к устройствам для механизации погрузочно-разгрузочных работ, а именно к конструкции телескопических конвейеров, и может быть использовано, например, в мясной промышленности для погрузки полутуш мяса в автотранспорт. Известен телескопический ленточный кон вейер, содержащий неподвижную раму и связанную с ней выдвижную секцию со смонтированными на ней роликоопорами, на которых размещена тяговая несущая лента, огибающая концевой и натяжной барабаны и образующая на холостой ветви петлю, обеcпeчивatoщyю удли нение конвейера. КонвеЯер снабжен тяговыми цепями, огибающими установленные на раме поворотные звездочки, закрепленными своими концами на выдвижной секции 1. Однако такой конвейер не может быть применен при погрузке туш мяса с- рампы в автотранспорт, так как его размер по высоте превышает размер, оставшийся между полом рампы и тушей, подвешенной на подвесном пути. Наиболее близким к изобретению является телескопический конвейер, включающий огибающий ведущий и ведомый элементы грузонесущий орган с приводом, выдвижную секцию, размещенную в корпусе, установленном на раме с возмо нностью изменения угла к горизонту посредством приспособления наклона, компенсирующий механизм II выдвижной механизм 2. Однако такой конвейер имеет сложную конструкцию и кинематику, больщие габариты в сложенном состоянии, для его работы ,треоуется большая производственная плоЦель изобретения упрощение конструкции конвейера. Поставленная цель достигается тем, что в телескопическом конвейере, включающем огибающий ведущий и ведомый элементы грузонесущии орган с приводом, выдвижную секцию, размещенную в корпусе, установленном на раме с возможностью изменения угла наклона к горизонту, компенсирующий и выдвижной механизмы, выдвижной механизм выполнен в виде связанных друг с другом посредством кинематической связи горизонтального и вертикального винтов соответственно с верхней и нижней гайками, а компенсирующий механизм выполнен в виде вертикальных направляющих и установленной в них с возможностью перемещения платформь, на которой закреплена верхняя гайка и размещен ведущий элемент с приводом грузонесущего органа, при этом
выдвижная секция выполнена в виде каретки, на которой установлен ведомый элемент и закреплена нижняя гайка.
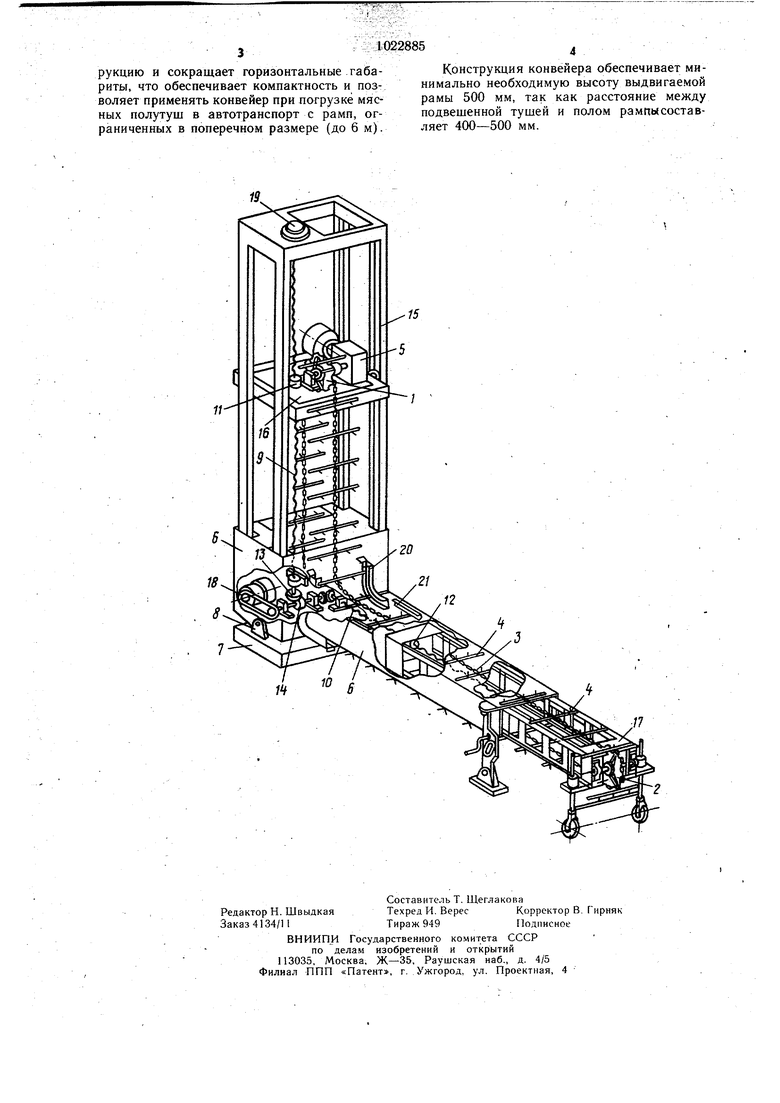
нение телескопического конвейера в виде вертикальных направляющих с горизонтально выдвигаемой кареткой упрощает констКроме того, грузонесущий орган выполнен в виде цепи и закрепленных на ней траверс, а кинематическая связь выполнена в виде двух конических шестерен. На чертеже изображен телескопический конвейер. Телескопический конвейер включает ведущий 1 и ведомый 2 элементы в виде ведущей и ведомой звездочек, огибающий их грузонесущий орган в виде цепи 3 и закрепленных на ней траверс 4, привод 5 грузонесущего органа, размещенную в корпусе б выдвижную секцию, компенсирующий механизм и выдвижной механизм. Корпус 6 установлен на раме 7 с возможностью изменения угла наклона к горизонту с помош,ью шарнира 8. Выдвижной механизм выполнен в виде связанных кинематической связью вертикального 9 и горизонтального 10 винтов соответственно с верхней И и нижней 12 гайками: Кинематическая связь выполнена в виде двух конических -шестерен 13 и 14. Компенсирующий механизм выполнен в виде вертикальных направляющих 15 и установленной в них с возможностью перемещения платформы 16, на которой закреплена верхняя гайка 11 и размещен ведущий элемент 1 с приводом 5 грузонесущего органа. Выдвижная секция выполнена в виде каретки 17, на которой установлен ведомый элемент 2 и закреплена нижняя гайка 12. Вертикальный 9 и горизонтальный 10 винты приводятся в движение двигателем 18. Вертикальный винт 9 упирается верхней частью в корпус подшипника 19, а нижней частью через конические (одинаковых параметров) шестерни 13 и 14 соединен с горизонтальным винтом 10. Угол наклона к горизонту изменяется от О до 10°. Траверсы 4 перемещаются в направляющих 20 и 21. Работа телескопического конвейера осуществляется следующим образом. Для перемещения выдвижной секции включают привод винтов 9 и 10, происходит удлинение конвейера. Синхронно с перемещением каретки 17 опускается платформа 16 с приводом 5 грузонесущего органа. После необходимого удлинения включают привод 5, и конвейер работает на заданной длине. Для сокращения длины конвейера выключают привод 5 и включают двигатель 18 на реверс. Положительный эффект от использова изобретения состоит в том, что выпол
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический конвейер | 1985 |
|
SU1276579A1 |
| Телескопический конвейер | 1985 |
|
SU1276580A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1969 |
|
SU238400A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Телескопический конвейер | 1985 |
|
SU1283169A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Телескопический захват грузоподъемной машины | 1989 |
|
SU1742168A1 |
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
I. ТЕЛЕСКОПИЧЕСКИЙ КОНВЕЙЕР, включающий огибающий ведущий и ведомый элементы гру-зонесущий орган с приводом, выдвижную секцию, размещенную в корпусе, установленном на раме с возможностью изменения угла наклона к горизонту, компенсирующий и выдвижной механизмы, отличающийся тем, что, с целью упрощения конструкции, выдвижной механизм выполнен в виде связанных друг с другом посредством кинематической связи горизонт-ального и вертикального винтов соответственно с верхней и нижней гайками, а компенсирующий механизм выполнен в виде вертикальных направляющих и установленной в них с возможностью перемещения платформы, на которой закреплена верхняя гайка и размещен ведущий -элемент с приводом грузонесущего органа, при этом выдвижная секция выполнена в виде каретки, на которой установлен ведомый элемент и закреплена нижняя гайка. 2. Конвейер по п. 1, отличающийся тем, .что грузонесущий орган выполнен в виде цепи и закрепленных на ней траверс, а кинематическая связь выполнена в виде двух (Л конических шестерен.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Телескопический ленточный конвейер | 1972 |
|
SU486978A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
