Изобретение относится к устройствам транспортирования конвейерного типа, преимущественно сыпучих и тарноштучных грузов.
Известна транспортная система, включающая загрузочный и приемные пункты, накопительный тележечный конвейер, выполненный из бесконечного тягового органа и из грузонесущих тележек с колесами на осях, взаимодействующих с механизмами их стопорения, при этом колеса грузонесущих тележек установлены на бесконечном тяговом органе 1.
В данной транспортной системе не решен вопрос опрокидывания и возврата тележек в исходное положение.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемой является транспортная система, включающая загрузочный и приемный пункты, накопительный тележечный конвейер, выполненный из огибающего блоки бесконечного тягового органа, из грузонесущих тележек с колесами на осях и щарнирно установленными поворотными подпружиненными рычагами, взаимодействующими с механизмами стопорения грузонесущих тележек, и из приспособлений для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно 2.
Недостаток данной транспортной системы заключается в том, что грузонесущие тележки резко трогаются за счет взаимодействия их поворотных подпружиненных рычагов с бесконечным тяговым органом, а также в возможности заклинивания в местах огибания блоков тележек из-за выполнения приспособления для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно в виде направляющих металлических полос, что снижает надежность работы системы в целом, а направляющие металлические полосы при установке их по всей длине накопительного тележечного конвейера увеличивают металлоемкость.
Цель изобретения - повышение надежности работы и снижение металлоемкости при установке колес грузонесущих тележек на бесконечном тяговом органе.
Указанная цель достигается тем, что в транспортной системе, включающей загрузочный и приемный пункты, накопительный тележечный конвейер, выполненный из огибающего блоки бесконечного тягового органа, из грузонесущих тележек с колесами на осях и щарнирно установленными поворотными подпружиненными рычагами, взаимодействующими с. механизмами стопорения грузонесущих тележек, и из приспособлений для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно, поворотный подпружиненный рычаг каждой грузонесущей тележки установлен на ней с возможностью взаимодействия с одной из ее осей, при этом накопительный тележечный
конвейер имеет обводные блоки, а приспособления для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно выполнены в виде установленных соосно блокам накопительного тележечного конвейера перепончатых, зубчатых колес с пазами на верщинах зубьев, отклоняющих блоков и охватывающих отклоняющие блоки и перепончатые зубчатые колеса удерживающих канатов, причем Отклоняющие блоки размещены с противоположных сторон ветвей бесконечного тягового органа накопительного тележечного конвейера, а обводные блоки - вне его и между его ветвями с возможностью огибания отклоняющих и обводных блоков соответственно удерживающими канатами и бесконечным тяговым органом с противоположной по наклону навивкой.
Кроме того, поворотный подпружиненный рычаг каждой грузонесущей тележки
5 установлен на ней с возможностью взаимодействия с одной из ее осей посредством размещенной на тыльной его стороне тормозной колодки.
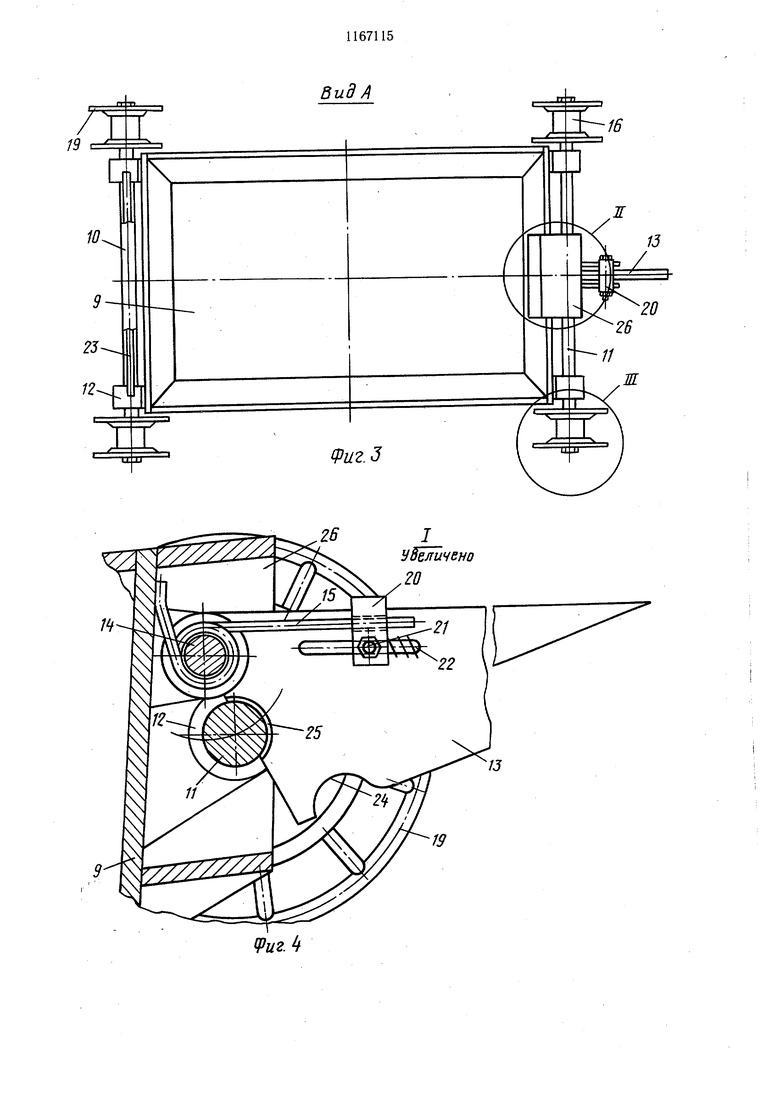
На фиг. 1 изображена транспортная система, общий вид; на фиг. 2 - грузоне0сущая тележка для транспортировки груза, общий вид; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - узел I на фиг. 2; на фиг. 5 - узел II на фиг. 3; на фиг. 6 - узел III на фиг. 3; на фиг. 7 - приспособление для
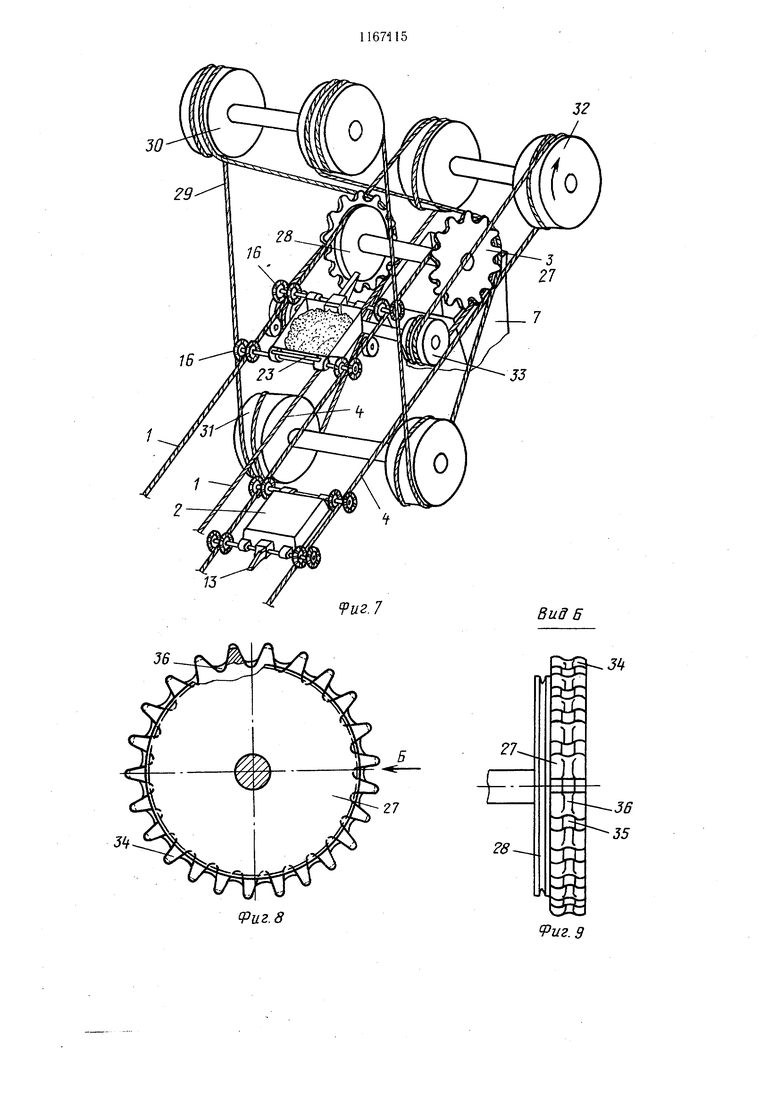
5 опрокидывания и перевода грузонесущих тележек, общий вид; на фиг. 8 - перепончатое зубчатое колесо, общий вид; на фиг. 9 -- вид Б на фиг. 8; на фиг. 10 - механизм стопорения грузонесущих тележек, общий вид; на фиг. 11 - перекладина
О механизма стопорения тележек, поперечное сечение.
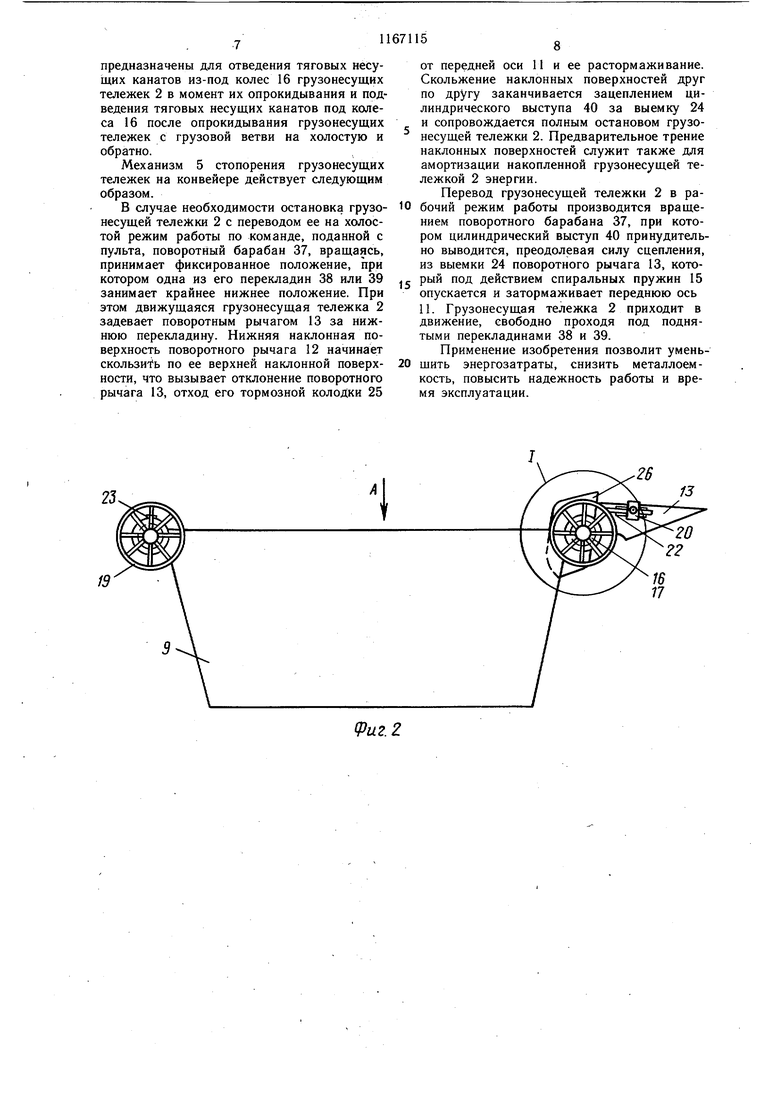
Транспортная система включает накопительный тележечный конвейер в виде бесконечного тягового органа 1, меняющего
5 направление даижения на противоположное на концевых стадиях, и грузонесущих тележек 2 для транспортировки грузов, приспособление 3 для опрокидывания и перевода грузонесущих тележек 2 на холостую ветвь 4 бесконечного тягового органа 1 и
0 обратно, механизм стопорения 5 грузонесущих тележек 2 на накопительном тележечном конвейере, загрузочный пункт (бункер) 6 и приемный пункт (бункер) 7.
Бесконечный тяговый орган представля5 ет собой тяговые несущие канаты, которые на участке между концевыми станциями опираются на желобчатые ролики 8. Верхние ряды желобчатых роликов 8 вместе с нахолящимся на них в конкретный момент, участком бесконечного тягового органа 1 составляют грузовую ветвь накопительного тележечного конвейера; соответственно нижние ряды желобчатых роликов 8 с участком находящегося на них в данный момент времени бесконечного тягового органа - холостую ветвь 4.
Грузонесущая тележка 2 для транспортировки грузов содержит кузов 9, заднюю 10 и переднюю 11 оси, прикрепленные к кузову 9 со свободой вращения в подщипниках 12, поворотный рычаг 13, щарнирно установленный на верхней передней части кузова 9 со свободой вращения на оси 14 и подпружиненный спиральными пружинами 15. На концах задней 10 и передней 11 осей жестко и соосно закреплены колеса 16, снабженные ребордами 17, футеровкой . 18, предохранительными ободами 19. Колеса 16 установлены на бесконечном тяговом органе 1. Расстояние между ребордами 17 на всех колесах 16 тележки 2 одинаковое и с зазором превыщает двойной диаметр грузонесущего тягового органа I. Одни плечи спиральных пружин 15 уперты в кузов 9, другие с возможностью скольжения продеты через отверстия в П-образном хомутике 20. Положение П-образного хомутика 20 на поворотном рычаге 13 фиксируется сквозным стопорным болтом 21, свободно проходящим через продольный паз 22. Корпуса подшипников 12 на задней оси 10 жестко соединены цилиндрическим стержнем 23. Поворотный рычаг 13 спереди имеет клиновидную форму, переходящую в нижней части в цилиндрическую выемку 24, а с тыльной стороны содержит тормозную колодку 25. Ось 14 укрыта в кожухе 26, жестко укрепленном на кузове 9.
Приспособление 3 для опрокидывания и перевода грузонесущих тележек 2 состоит из зубчатых перепончатых колес 27 - одинаковых и соосных, выполненных заодно с соосными одноручьевыми блоками положительного тележечного конвейера 28, удерживающих канатов 29, отклоняющих блоков 30, 31 и обводных блоков 32 и 33. Все зубчатью перепончатые колеса 27 и блоки 30-33 имеют свободу вращения. Зубчатые перепончатые колеса 27 установлены соосно и содержат зубья 34 с пазами 35 на верщинах, соединенные перепонками 36. Каждый из удерживающих канатов 29 огибает зубчатое перепончатое колесо 27 по пазам 35 и охватывает отклоняющие блоки 30 и 31. Отклоняющие блоки 30 и 31 имеют одинаковые размеры и охватываются одним удерживающим канатом 29, имеющим противоположные на них навивки. При этом отклоняющий блок 30 размещен над ветвями бесконечного тягового органа 1 накопительного тележечного конвейера, а отклоняющий блок 31 - прд ними. Одинаково расположенные отклоняюихие блок.и 30 и 31 выполнены соосно. Отклоняющие блоки 31 установлены с возможностью натяжения бесконечных удерживающих канатов 29. , Каждый из несущих тяговых канатов бесконечного тягового органа 1 при переходе с грузовой ветви на холостую 4 после одноручьевого блока 28 проходит через обводные блоки 32 и 33 с противоположной по наклону навивкой. При этом обводные блоки 33 расположены в пространстве между грузовой и холостой ветвью 4 конвейера, а обводные блоки 32 - вне его. Одинаково расположенные обводные блоки 32 и 33 выполнены соосно.
Механизм стопорения 5 тележек 2 на конвейере выполнен в виде поворотного барабана 37 типа беличьей клетки, содержащего перекладины 38 и 39. Перекладины 38 и 39 спереди имеют по всей длине в поперечном сечении клиновидную форму, а в среднем сечении снабжены цилиндрическим выступом 40. Механизм стопорения 5 тележек 2 на конвейере устанавливается на грузовой и холостой ветвях конвейера перед
5 приспособлениями 3 и у загрузочного бункера 6 на грузовой ветви конвейера.
Действие транспортной системы заключается в следующем.
Грузонесущая тележка 2 конвейера в груженом и порожнем состоянии транспортируется бесконечным тяговым органом 1 в виде несущих тяговых канатов, являющимся одновременно несущим. Загрузка грузонесущих тележек 2 осуществляется с помощью загрузочного бункера 6, а выгрузка грузовесущих тележек 2 происходит на концевои станции при переходе грузонесущих
тележек 2 с грузовой ветви конвейера на холостую. Данный переход осуществляется приспособлением 3, и таким же приспособлением осуществляется обратный переход
0 грузонесущих тележек 2 с холостой ветви на груженую на противоположном конце конвейера со стороны загрузочного бункера 6.
При постоянно движущихся в процессе работы конвейера тяговых канатах грузонесущие тележки 2 автоматически могут как прекращать, так и возобновлять движение в зависимости от того, имеют ли они сцепление с бесконечным тяговым органом 1 (тяговым несущим канатом). При
Q расцеплении грузонесущих тележек 2 с тяговыми несущими канатами грузонесущие тележки 2 прекращают движение и переходят на холостой режим работы, потребляя минимальное количество энергии. После возникновения сцепления грузонесущих тележек 2 с несущими канатами грузонесущие тележки 2 переходят на рабочий режим работы, начинают перемещаться, постепенно приобретая скорость, равную скорости движения тяговых несущих канатов. Управление процессом сцепления и расцепления грузонесущих тележек 2 с тяговыми несущими канатами осуществляется посредством внешнего воздействия на их поворотные рычаги 13. Данное воздействие может осуществляться как механизмами стопорения 5 грузонесущих тележек 2 на конвейере, так при соприкосновении грузонесущих тележек 2 друг с другом. Грузонесущие тележки 2 переводятся на холостой или рабочий режим работы индивидуального, когда отпадает или появляется необходимость в их использовании. Этот принцип реализуется при следующих обстоятельствах.
Переход грузонесущей тележки на холостой режим работы осуществляется, если занята трасса стоящей впереди грузонесущей тележкой, если холостая ветвь конвейера полностью заполнена неподвижными грузонесущими тележками, если занят загрузочный фронт F (фиг. 1) у загрузочного бункера б и при установке грузонесущей тележки под загрузочный бункер 6 для заполнения грузом.
Переход грузонесущей тележки на рабочий режим работы осуществляется: при освобождении трассы (впереди стоящая грузонесущая тележка прищла в движение или появилось вакантное место на холостой ветви конвейера), если,освободился загрузочный фронт F и подощла очередь данной тележки, если степень заполнения грузом рассматриваемой грузонесущей тележки, расположенной под загрузочным бункером 6, достигла требуемой величины, которая контролируется весовыми датчиками, смонтированными в одном из желобчатых роликов 8, размещенных на грузовой ветви под загрузочным бункером 6.
Грузонесущая тележка 2 для транспортировки грузов действует следующим образом.
В рабочем режиме работы (то есть в процессе движения) поворотный рычаг 13, укрепленный на оси 14 в кожухе 26 на кузове 9, под действием спиральных пружин 15 прижат тормозной колодкой 25 к передней оси 11, вследствие чего колеса 16 на передней оси 11 оказываются затор1м(оженными от поворота в подщипниках 12. Между заторможенными колесами 16 на передней оси 11 и движущимися тяговыми несущими канатами возникает сила трения скольжения, составляющая силу тяги грузонесущей тележки 2, приводящую ее в движение в груженом и порожнем состоянии. Тормозная сила или сила тяги грузонесущей тележки 2 регулируется силой давления спиральных пружин 15 на поворотный рычаг 13 ив конечном итоге силой давления тормозной колодки 25 на переднюю ось 11. Эта регулировка осуществляется изменением плеч спиральных пружин 15 путем перемещения
П-образного хомутика 20 в продольном пазу 22 с последующим закреплением П-образного хомутика 20 на поворотном рычаге 13 болтом 21.
Перевод грузонесущей тележки 2 в холостой режим работы с минимальным потреблением энергии производится принудительным отклонением поворотного рычага 13 в сторону открытой части кузова 9. При этом нарущается контакт тормозной колодки 25 с передней осью 11 и она получает возможность вращения в подщипниках 12, так же как и задняя ось 10, которая постоянно имеет возможность вращения и в рабочем и в холостом режиме грузонесущей тележки 2.
5 В результате перевода грузонесущей тележки 2 на холостой режим работы грузонесущая тележка 2 оказывает минимальное сопротивление движению тяговых несущих канатов, равное суммарное силе трения вращению задней 10 и передней 11 осей в под щипниках 12. При переходе на холостой режим работы грузонесущая тележка 2 поворотным рычагом 13 прицепляется к механизму, переводящему ее в холостой режим работы. Происходит это путем зацепления
5 поворотным рычагом 13 цилиндрической выемки 24, например, за цилиндрический стержень 23 впереди стоящей грузонесущей тележки 2. Отцепление происходит автомати. чески с отъездом впереди стоящей грузонесущей тележки, которая своей силой тяги
преодолевает силу сцепления грузонесущих тележек и выводит цилиндрический стержень 23 из зацепления с поворотным рычагом 13 сзади стоящей грузонесущей тележки 2. От загрязнения и от повреждения пружины 15, ось 14 и тормозную колодку 25 грузонесущей тележки 2 предохраняет кожух 26.
Приспособление 3 для опрокидывания и перевода грузонесущих тележек 2 на холостую ветвь бесконечного тягового органа и обратно действует следующим образом.
Влекомые тяговыми несущими канатами грузонесущие тележки 2, встречаясь с зубчатыми перепончатыми колесами 27, снача, ла передними, а затем и задними колесами 16 попадают между зубьев 34 и, движимые уже зубчатыми перепончатыми колесами 27, опрокидываются. При контакте колес
16и зубьев 34 перепонки 36 оказываються между ребордами 17 и центрируют грузонесу.
0 щие тележки 2 по внещним ребордам 17 колес 16, в то время как несущие тяговые канаты вблизи устройства 3 центрируют грузонесущие тележки 2 с помощью блоков 28 и желобчатых роликов 8 относительно продольной оси конвейера по внутренним ребордам
17колес 16. От расцепления колес 16 с зубьями 34 в период опрокидывания грузонесущей тележки 2 страхуют удерживающие канаты 20. Блоки 28 и обводные блоки 32 и 33
предназначены для отведения тяговых несущих канатов из-под колес 16 грузонесущих тележек 2 в момент их опрокидывания и подведения тяговых несущих канатов под колеса 16 после опрокидывания грузонесущих тележек с грузовой ветви на холостую и обратно.
Механизм 5 стопорения грузонесущих тележек на конвейере действует следующим образом.
В случае необходимости остановка грузонесущей телеЖки 2 с переводом ее на холостой режим работы по команде, поданной с пульта, поворотный барабан 37, вращаясь, принимает фиксированное положение, при котором одна из его перекладин 38 или 39 занимает крайнее нижнее положение. При этом движущаяся грузонесущая тележка 2 задевает поворотным рычагом 13 за нижнюю перекладину. Нижняя наклонная поверхность поворотного рычага 12 начинает скользить по ее верхней наклонной поверхности, что вызывает отклонение поворотного рычага 13, отход его тормозной колодки 25
от передней оси 11 и ее растормаживание. Скольжение наклонных поверхностей друг по другу заканчивается зацеплением цилиндрического выступа 40 за выемку 24 и сопровождается полным остановом грузонесущей тележки 2. Предварительное трение наклонных поверхностей служит также для амортизации накопленной грузонесущей тележкой 2 энергии.
Перевод грузонесущей тележки 2 в рабочий режим работы производится вращением поворотного барабана 37, при котором цилиндрический выступ 40 принудительно выводится, преодолевая силу сцепления, из выемки 24 поворотного рычага 13, кото- рый под действием спиральных пружин 15 опускается и затормаживает переднюю ось 11. Грузонесущая тележка 2 приходит в движение, свободно проходя под поднятыми перекладинами 38 и 39.
Применение изобретения позволит уменьшить энергозатраты, снизить металлоемкость, повысить надежность работы и время эксплуатации.


| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально замкнутый тележечный конвейер-накопитель | 1988 |
|
SU1609728A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| СОРТИРОВОЧНЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1972 |
|
SU331990A1 |
| Вертикально-замкнутый накопительный конвейер | 1985 |
|
SU1399230A1 |
| КАРКАСНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2232707C2 |
| Тележечный конвейер | 1983 |
|
SU1097531A1 |
| Устройство для поперечной передвижки участков конвейера | 1986 |
|
SU1330053A2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| Тележечный конвейер | 1983 |
|
SU1131780A1 |
| Вертикально-замкнутый тележечный конвейер | 1987 |
|
SU1528699A1 |


1. ТРАНСПОРТНАЯ СИСТЕМА, включающая загрузочный и приемный пункты, накопительный тележечный конвейер, выполненный из огибающего блока бесконечного тягового органа, из грузонесущих тележек с колесами на осях и шарнирно установленными поворотными подпружиненными рычагами, взаимодействующими с механизмами стопорения грузонесущих тележек, и из приспособлений для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно, отличающаяся тем, что, с целью повыщения надежности работы и снижения металлоемкости при установке колес грузонесущих тележек на бесконечном тяговом органе, поворотный подпружиненный рычаг каждой грузонесущей тележки установлен на ней с возможностью взаимодействия с одной из ее осей, при этом, накопительный тележечный конвейер имеет обводные блоки, а приспособления для опрокидывания и перевода грузонесущих тележек на холостую ветвь бесконечного тягового органа и обратно выполнены в виде установленных соосно блокам накопительного тележечного конвейера перепончатых зубчатых колес с пазами на верщинах зубьев, отклоняющих блоков и охватывающих отклоняющие блоки и перепончатые зубчатые колеса удерживающих канатов, причем отклоняющие блоки размещены с противоположных сторон ветвей бесконечного тягового органа накопительного тележечного конвейера, а обводные блоки - вне его и между его ветвями с возможностью огибания отклоняющих ko и обводных блоков соответственно удерживающими канатами и бесконечным тяговым органом с противоположной по наклону навивкой. 2. Транспортная система по п. 1, отличающаяся тем, что поворотный подпружиненный рычаг каждой грузонесущей тележки установлен на ней с возможностью взаимодействия с одной из ее осей посредством раз05 мещенной на тыльной его стороне тормоз 1 ной колодки. сд
26
I
13
Вид/)
19
d
9
2312
Фи2.3
(РигЛ
I Увеличено
aiiitzi
(Риг:5 Увеличено
увеличено
//
Ж
X
у
19
/
п.
18
16
У//////////
13
Тиг.7
32
33
Вид В
36
Vuz.8
ifc
J4f
it
it
36 35
.9
W
39(38)
Риг. 11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Накопительный конвейер | 1977 |
|
SU929510A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для подъема и опрокидывания контейнеров | 1980 |
|
SU918189A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
