(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПОЗИЦИОННЫМ ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1978 |
|
SU769486A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для управления стендом прикатки зубчатых передач | 1986 |
|
SU1413601A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
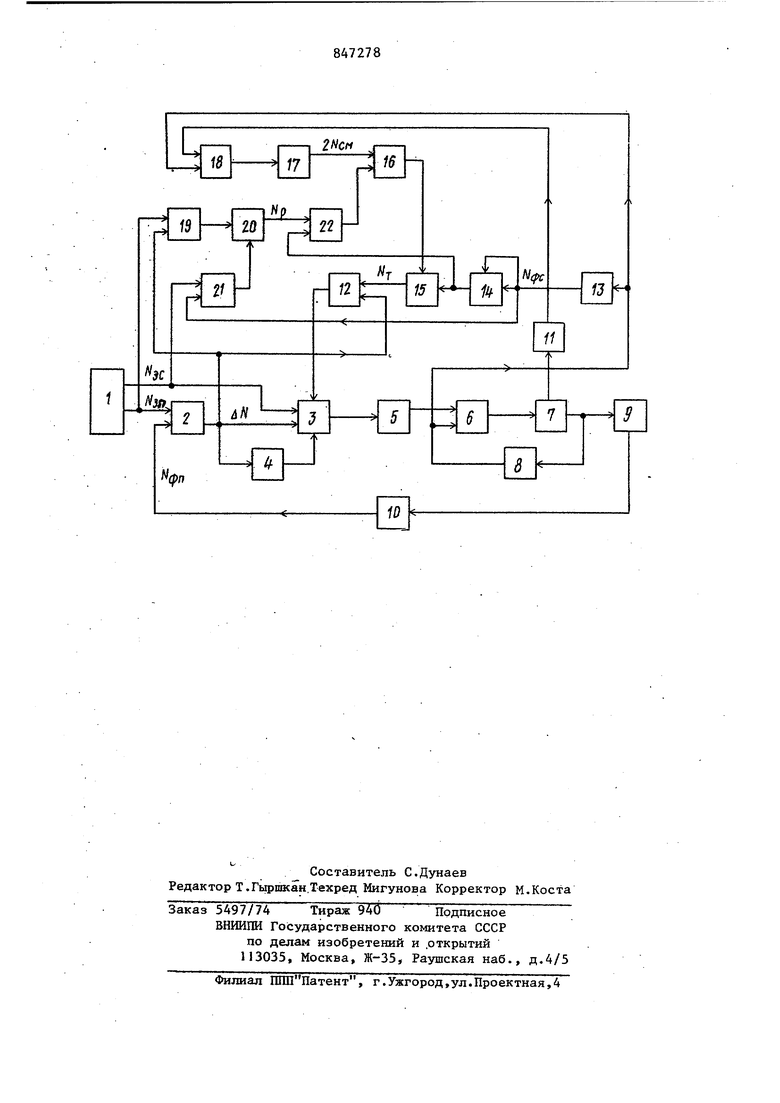
Изобретение относится к цифровым автоматическим системам управления может быть использовано для програм много управления различными механиз мами, например подвижными панелями регулируемых сопел газодинамических установок. Известно устройство управления, в котором режим торможения электродвигателя определяется в процессе разгона и торможения исполнительного органа и поддерживается постоянным по величине момент торможения Г З Недостаток устройства - невысокое быстродействие, так как оно не позво ляет обеспечить перевод электродвига теля в режим торможения в момент, когда оставшийся путь до заданного положения становится равным тормозному пути электродвигателя. Кроме того, устройство обеспечивает заданную точность позиционирования только при наличии установившейся скорости движения исполнительного органа и 11ри отсутствии внешних возмущений. Наиболее близким по технической сущности к изобретению является устройство для управления позиционным электроприводом, содержащее последовательно соединенные программнозадающий блок, арифметический блок, ко 5 утатор, преобразователь код-напряжение, блок управления двигателем k двигатель, вал которого механически связан с объектом управления и датчиком скорости, выход которого соединен со вторым входом блока управления двигателем, входом первого преобразователя напряжение-код и первым вхо-. дом датчика статического момента, второй вход которого через датчик тока подключек к двигателе, а выход через второй преобразователь напряжение-код соединен с первым входом сумматора, выход которого подключен к первому входу первого блока деления, второй вход которого соединен через блок умножения с выходом первого преобразователя напряжейие-код, а выход - с первым входом блока сравне ния кодов, выход которого подключен к первому управляющему входу коммутатора, а второй вход - к выходу арифметического блока, соединенному через пороговый элемент со вторым управляющим входом коммутатора, второй информационный вход которого сое динен со вторым выхЪдом программнозадающего блока, а также кодовый дат чик положения, вход которого соедине с объектом управления, а выход - со вторым входом ари4 1етического блока Повьппение качества регулирования этом устройстве достигается введение функционального преобразователя, опр деляющего путь торможения с учетом и менения скорости перемещения и стати ческого момента гри постоянном полном моменте электродвигателя, задаваемом с помощью задатчика полного м мента. Однако, движущий момент элект двигателя, в свою очередь, зависит от скорости перемещения, статического момента, инерционных масс подвижн частей устройства и вследствие други причин. Это приводит к смещению момента начала торможения электродвига теля, появлению перерегулирования и снижению быстродействия устройства. Цель изобретения - повышение быстродействия устройства. Указанная цель достигается тем, что в него введены второй блок сравнения кодов и последовательно соединенные блок вычитания, управляющий регистр и второй блок деления, выход которого подключен к второму входу сумматора, а второй вход - к выходу блока умножения, причем первый и вто рой входы блока вычитания соединены соответственно с первым выходом программно-задающего блока и выходом арифметического блока, первый и второй входы второго блока сравнения кодов - со вторым выходом программно задающего блока и выходом первого преобразователя напряжение-код, а выход второго блока сравнения кодов подключен к второму входу управляемого регистра. чертеже приведена блок-схема На устройства. Устройство содержит программнозадающий блок 1, арифметический блок . коммутатор 3, пороговый элемент 8 4 А, преобразователь 5 код-напряжение, блок 6 управления двигателем, двигатель 7, датчик 8 скорости, объект 9 управления, кодовый датчик 10 положения , датчик 1I тока, первый блок 12 сравнения кодов, первый преобразователь 13 напряжение-код, блок 14 умножения, первый блок 15 деления, сумматор 16, второй преобразователь 17 напряжение-код, датчик 18 статического момента, блок 19 вычитания, управляемый регистр 20, второй блок 21 сравнения кодов и второй блок 22 деления. Путь торможения электродвигателя до полной остановки, при равнозамедленном движении S, и путь разгона до заданной скорости Sp , определяется выражениями d-Ulnl VMr,-M, О -ли:РМП-Vгде п - скорость электродвигателя; К - коэффициент пропорциональности, полный и статический моменты электродвигателя, или в цифровом виде .L Т М .... (,,) Р Мпм-Мсм -коды пути разгона и торможения электродвигателя , %.% -коды полного и статического моментов электродвигателя;-код фактической скорости электродвигателя, коэффициент пропорциональности;К - число дискретных единиц кодового датчика положения, пройденное за один оборот двигателя. В выражении (1) величина К N (рс реализуется с помощью блока 14 умножения и первого преобразователя 13 напряжение-кодJвход которого подключен к выходу датчика 8 скорости. Величина см Реализуется с помощью датчика -11 тока, датчик 18 статического момента и второго преобразователя 17 напряжение-код. Величина N-.. полного момента пм электродвигателя определяется из вы ражения (2) где величина кода пути разгона ,,„ равна значению разности кода заданного положения tin и кода рассогласования по положению UN в момент равенства заданной Nn.. и фа тической N(j) скорости электродвиг теля и реализуется с помощью блока 19 вычитания, второго устройства 21 сравнения кодов и управляемого реги ра 20. Из выражений (1) и (З) следует, что тормозной путь равен м , Полученная зависимость реализуетс с помощью второго блока 22 деления, цифрового сумматора 56 и первого блока 15 деления, а коэффициент 2 учитывается при выборе второго преоб разователя 17 напряжение-код. На выходе первого блока 15 деления образуется сигнал, пропорциональный тормозному пути электродвигателя. Такое построение устройства позволяет определить тормозной путь с учетом фактических значений скорости перемещения, статического и полного момента электродвигателя, что позволяет точно определить момент нача ла торможения электродвигателя. Устройство работает следующим образом. Программа управления скоростью и положением заносится в блок памяти программно-задающего блока 1 и выдается в виде двоичных кодов. Код заданной скорости Nn поступает на коммутатор 3 и, при отсутствии управ ляющих сигналов с выходов первого блока 12 сравнения кодов и пороговог элемента 4, поступает без изменения на. преобразователь 5 код-напряжение. На выходе преобразователя код-напряжение устанавливается уровень напряжения, соответствующий заданной скорости перемещения.. Это значение напр 8 жения подается на вход электропривода, состоящего из блок 6 управления двигателем, датчика 8 скорости и электродвигателя 7, который перемещает исполнительный орган объекта управленил. В процессе перемещения код заданного положения N сравнивается в арифметическом блоке 2 с фактическим кодом положения Мф,, поступающим с кодового датчика 10 положения. Арифметический блок 2 вырабатывает код рассогласования по положению & N, который поступает на первый блок 12 сравнения кодов, коммутатор 3, пороговый элемент 4 и на блок I9 вычитания. Одновременно на выходе блока 14 умножения появляется сигнал КМф, а на выходе второго преобразователя 17 напряжение-код - сигнал 2Nj...B процессе разгона электродвигателя происходит сравнение кодов заданной и фактической скорости. Когда код фактической скорости становится равным коду заданной скорости n,Q,второе устройство 21 сравнения кодов вьщает сигнал на запоминание кода, поступающего с выхода блока 19 вычитания. На выходе управляемого регистра 20 устанавливается сигнал Np, пропорциональный пути разгона электродвигателя. Сумматор 16, первый и второй блоки 15 и 22 деления производят обработку поступающих сигналов согласно выражению (4). Дальнейшая отработка перемещения выполняется при постоянной заданной скорости перемещения. - Когда код рассогласования Jv N меньшается,т.е. код оставшегося пути о заданного положения, становится авным коду тормозного пути М, на ыходе первого блока 12 сравнения коов появляется управляющий сигнал. оммутатор 3 подключает на вход пребразователя 5 код-напряжение код 0. Под действием сигнала электровигатель переходит в режим торможеия. Когда код рассогласования N тановится близким к нулю, срабатывает ороговый элемент 4,в результате комутатор 3 подключает на вход преобраователя 5 код-напряжение код расогласования N с выхода арифметичесого блока 2. Тем самым, вводитя в действие контур регулироания по положению и устройство
отрабатывает оставшееся рассогласование как в обычной следящей системе.
В режиме отработки малых перемещений, когда скорость электродвигателя не достигает заданной, код пути разгона NP с выхода блока 19 вычитания не запоминается, и сравнение кода оставшегося пути Д N с кодом тор-: мозного пути N происходит в динамике.
Предлагаемое устройство качество регулирования, позволяет устранить перерегулирование и сокращает время отработки перемещений.
Применение устройства, например для управления подвижными панелями регулируемого сопла, позволяет сократить непроизводительные затраты дорогостоящих газов, повьш1ает качество эксперимента и увеличивает производительность всей установки.
Формула изобретения
Устройство управления позиционным приводом, содержащее последовательно соединенные программно-задающий блок арифметический блок, коммутатор, преобразователь код-напряжение, блок управления двигателем и двигатель, вал которого механически связан с объектом управления и датчиком скорости, выход которого соединен со вторым входом блока управления двигателем, входом первого преобразователя напряжение-код и первым входом датчика статического момента, второй вход которого через датчик тока подключен к двигателю, а выход через второй преобразователь напряжение-код соединен с первым входом сумматора, выход которого подключен к первому
входу первого блока деления, второй вход которого соединен через блок умножения с выходом первого преобразователя напряжение-код, а выход - с
первым нходом-первого блока сравнения кодов, выход которого подключен к первому управляющему входу коммутатора, а второй вход - к выходу арифйетического блока, соединенному через
пороговый элемент со вторым управляющим входом коммутатора, второй информационный вход которого соединен со вторым выходом программно-задающего блока, а также кодовый датчик положения, вход которого соединен с объектом управления, а выход - со вторым входом арифметического блока, о т л ич а ю щ е ё с я тем, что, с целью повышения быстродействия устройства, в
него введены второй блок сравнения кодов и последовательно соединенные блок вычитания, управляющий регистр и второй блок деления, выход которого подключен к второму входу сумматора,
а второй вход - к выходу блока умножения, причем первый и второй входы блока вычитания соединены соответственно с первым выходом программнозадающего блока и выходом арифметического блока, первый и второй входы второго блока сравнения кодов - со вторым выходом программно-задающего блока и выходом первого преобразователя напряжение-код, выход второго
блока сравнения кодов подключен к второму входу управляемого регистра.
Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР
№ 452803, кл. G 05 В П/01, 1973.
