1
Изобретение относится к цифровым следящим системам и может быть использовано в различных системах автоматического управления, в которых требуется .обеспечение высоких динамических показателей IB различных режимах работы по управляющему воздействию.
Известны цифровые следящие системы, содержащие (Последовательно соединенные задающее устройство, цифровой сумматор, регистр управления, преобразователь код-напряжение, корректирующий контур, усилительнопреобразовательное устройство, исполнительный двигатель, механически связанный через редуктор с кодовым датчиком, выход которого подключен к входу цифрового сумматора, и тахогенератор, находящийся на валу исполнительного двигателя.
Однако в таких цифровых следящих системах значение динамической ошибки при отработке пилообразного или синусоидального входного сигнала с больщой скоростью велико, а переходный процесс при отработке ступенчатых сигналов, существенно превыщающих по амплитуде линейную зону системы, длителен.
Целью изобретения является повышение динаадической точности и быстродействия цифровой следящей системы.
В предлагаемой цифровой следящей системе эта цель достигается путем введения в схему логической схемы «ИЛИ и переключателя, через который тахогенератор соединен со
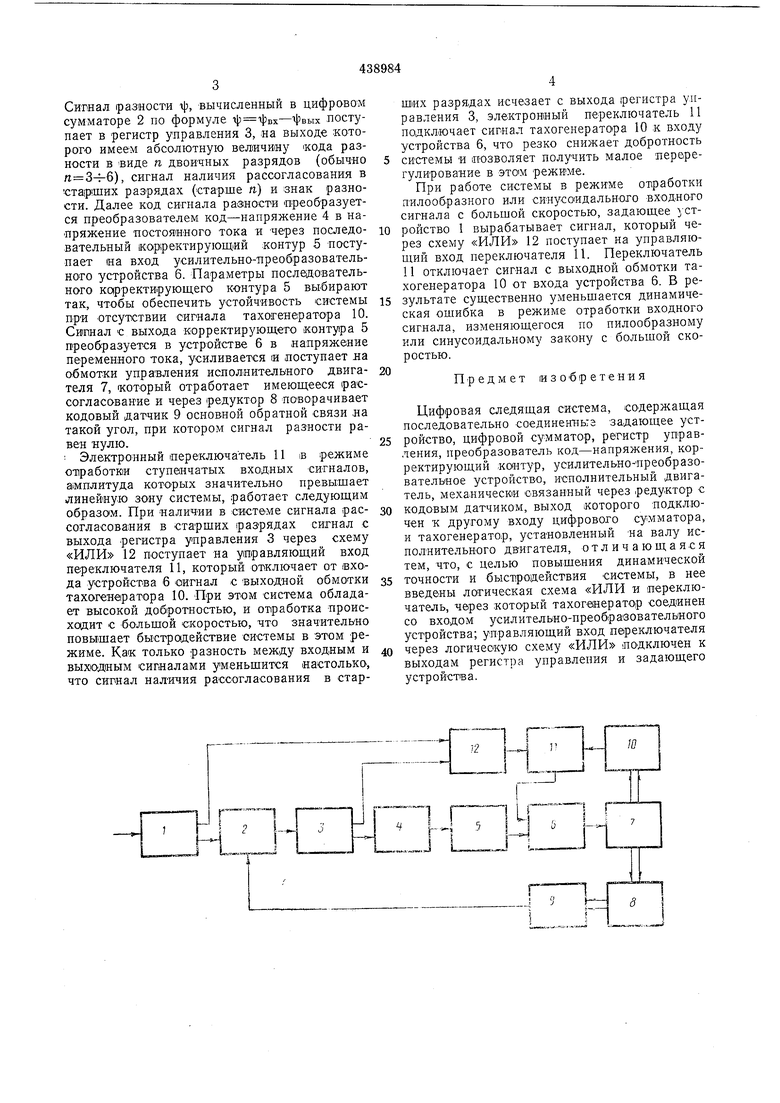
входом усилительно-преобразовательного устройства. Управляющий вход переключателя через схему «ИЛИ подключен к выходам регистра управления и задающего устройства. Блок-схема предложенной цифровой следящей системы, изображена на чертеже.
Цифровая следящая система содержит задающее устройство 1, цифровой сумматор 2, регистр управления 3, преобразователь код - напряжение 4, последовательный корректирующий контур 5, усилительно-преобразовательное зстройство 6, исполнительный двигатель 7, (редуктор 8, кодовый датчик 9, тахогенератор 10, электронный переключатель 11 и логическую схему «ИЛИ 12.
Система работает следующим образом.
Задающее устройство 1 вырабатывает управляющий сигнал фвх в виде двоичного кода. Входной сигнал в зависимости от режима работы изменяется по ступенчатому, пилообразному или синусоидальному закону. Управляющий сигнал, изменяющийся по одному из этих законов складывается в цифровом сумматоре 2 с сипнало м основной обратной связи 1|Еых, поступающим с кодового датчика 9 обратной связи также в виде двоичного кода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU840798A1 |
| Цифровая следящая система | 1978 |
|
SU769486A1 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Система с переменной структурой | 1978 |
|
SU807205A1 |
| Цифровая самонастраивающаяся следящая система | 1987 |
|
SU1425601A1 |
