(54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1980 |
|
SU883872A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Цифровая следящая система управленияпЕРЕМЕщЕНиЕМ Об'ЕКТА | 1979 |
|
SU798726A1 |
| Устройство для программного управления | 1981 |
|
SU1003020A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Адаптивная цифровая система управления электроприводом | 1985 |
|
SU1315938A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
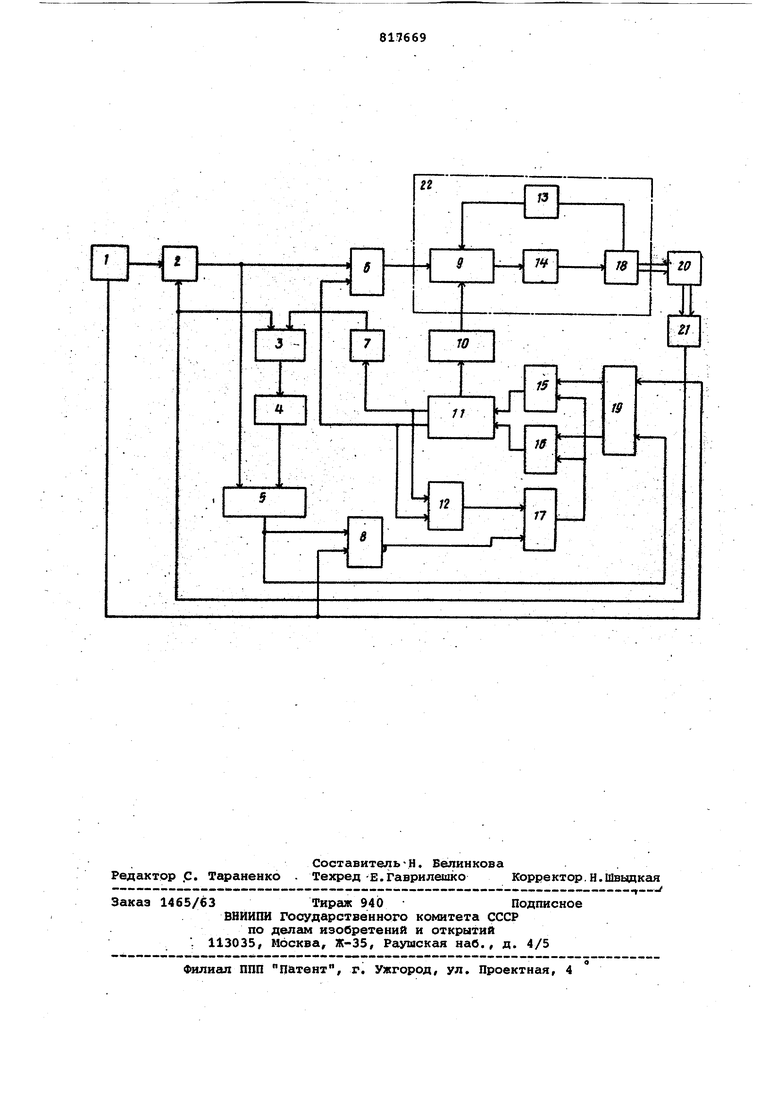
. - , - Г , . ,; ; Изобретение, относится к системам программного управления и может быт использовано, например, в системах управления электроприводами роботов манипуляторов, а также в системах автоматического управления, применя мых в самых различных областях промышленности.6 Известна цифровая система управления, содержащая последовательно соединенные задающее устройство, ср ниваяхцее устройство (цифровой сумматор), регистр управления, преобразователь код-напряжения, корректи рующее устройство, усилительно-преобразовательное устройство, исполнительный двигатель, механически связанный через редуктор с кодовым .датчиком, выход которого подключен ко входу сравнивающего устройства, и блок синхронизации 1. Наиболее близким техническим решением к предлагаемому яв-ляется счетно-импульсная система программного -управления ,содержащая последовательно соединенные считывающееустройство, формирователи, схему определения напряжения, реверсивный счетчик с выходами на последов-гтельно соединенные дешифратор и бло цифровой индикации и схему равно- ; значности, которая соединена с дами устройства ввода, схема равнозйачности соединена с последовательно подключенными блоком управления приводом подач, схемой изменения коэффициента пересчета счетчика, счетчиком фиксированного числа импульсов, триггером со счетным входом/ логической схемой переполюсовкн, а также последовательную цепочку из триггера, ста.ртстопного генератора, схемы И, схемы ИЛИ и дифференцирующую цепь, выходом соединенную с триггером ,2. Недостатком известных устройств является невысокое быстродействие и возможность перерегулирования..Это объясняется .тем, что к исполнительному двигателю прикладывается напряжение, зависящее от величины рассогласования. Цель изобретения - повышение точности системы. Поставленная цель достигается тем, что в систему программного управления, содержащую блок сравнения, первый вход .которого соеди.нен с первым выходом программнозадающего блока, блок управления следящим приводом, датчик-, положения, формирователь импульса и реверсивный счетчик, первый выход которого соединение первым входом первого . эле11 ;ента ИЛИ, а первый и второй входы - с выходами соответственно перв го и второго элемента И, подключен. ных первыми входами к соответствующим выходам триггера, введены блок, памяти, третий элемент И и последоаатвльно соединенные четвертый элеjMSHT И, регистр, компаратор, второ элемент ИЛИ и генератор импульсов, выход которого подключен ко вторым входам первого и второго элементов И, а второй вход через первый элемент ИЛИ - к Первому входу третьего элемента И и ко второму выходу ре- версивного счетчика, соединенного третьим выходом через блок памяти с первым входом блока управления следящим приводом, а первым выходом через формирователь импульса - с пе вым входом четвертого элемента И, второй вход которого соединен с выходом датчика положения и со вторым входом блока сравнения, подключенно го выходом ко второму входу компара тора и к первому входу тертьего элемента И, выход которого соединен со вторым входом блока управления С2ледя1дим приводом, а второй выход программно-задающего блока и выход компаратора соединены с соответству щими входами триггера. На чертеже представлена блок-схе ма системы.. Система включает программно-зада щий блок 1, блок 2 сравнения, четвертый элемент И 3, регистр (пути раз гона) 4, компаратор 5, третий элемент И 6, формирователь 7 импуль са, второй элемент ИЛИ 8, блок 9 сравнения, бло; 10 памяти, реверсив ный счетчик llj первый элемент ИЛИ 12, датчик 13 скорости, усилитель 14 мощности, первый и второй элементы И 15 и 16, генератор 17 импул сов, исполнительный двигатель 18, триггер,: 19, нагрузку 20, датчик 21 положения и блок 22 управления следящим приводом. Программно-задающий блок 1 задае величину и направление требуемого п ремещения нагрузки в виде двоичного кода и формирует сигналы управления триггером 19 и генератором 17. Блок 2 сравнивает величину требуемого перемещения с величиной действитель ного положения нагрузки 20, поступающего с выхода датчика 21,т выдает на выход величину разности. Элемент И 3 управляет регистром 4, в котором хранится код пути разгона. Компаратор 5 сравнивает величины рассогласования и пути разгона. Элемент И б управляет блоком 9 переключает систему с одного режиа работы на другой (с режима оптиального быстродействия на режим стабилизации). Формирователь 7 формирует импульс разрешения на запись в регистр 4.,Элементы ИЛИ 8 и 12 правляют генератором 17. Блок 9 сравнивает желаемое значение скорости с действительным и выдает.значение их разности на усилитель 14. В блоке 10 хранится закон оптимального изменения скорости. Счетчик 11 обеспечивает управление блоком 10 памяти, генератором 17 и элементами И 3„ и 6. Элементы И 15 и 16, генератор 17, триггер 19 управляют счетчиком 11.. Система работает следующим образом. В начальный момент на первом выходе блока 1 появляется код требуемого перемещения, поступивший на блок 2, а по сигналу с его второго выхода осуществляется установка в 1 триггера 19 и через элемент ИЛИ 8 запускается генератор 17..Одновременно на блок 9 сравнения через элемент И 6 поступает сигнал ошибки, знак которого запоминается. При этом импульсы с выхода генератора 17 поступают через элемент И 15 на суммирующий вход счетчика 11, который начинает счет вверх, первым импульсом закрывает элемент И 6 и осуществляет дискретную выборку содержимого блока 10 со скоростью, определяемой частотой генератора 17. Система начинает разгон по заданному закону изменения скорости и в момент достихсения рчетчиком 11 верхней гра- ницы происходит отключение генератора 17 (по сигналу с выхода элемента ИЛИ 12), запись в регистр 4 значения пути разгона и переход системы на режим движения с постоянной скоростью;. По мере отработки системой величины заданного перемещения величина ошибки на выходе блока 2 уменьшается. При равенстве оставшегося пути перемещения значению пути разгона, которое хранится в регистре 4, на выходе компаратора 5 появляется сигнал, устанавливающий триггер 19 в О и через элемент ИЛИ 8 запускающий гене-; ратор 17. При этом импульсы с выхода генератора 17 поступают через элемент И 16 на вычитающий вход счетчика 11. Содержимое счетчика умещается и из блока 10 происходит дискретная выборка значений скорости, соответствующих оптимальному закону торможения (в обратном порядке по сравнению с режимом разгона). В момент достижения нижней границы счетчика появляется сигнал на его втором выходе, который через элемент ИЛИ 12 отключает генератор 17 и открывает элемент И 6. Система .переходит на режим стабилизации. При этом работает контур регулирования по положению и скорости. .
В предлагаемой системе разгон и торможение осуществляется по заранее рассчитанному оптимальному закону, хранящемуся в блоке-памяти. Это позволяет реализовать практически любые законы оптимального управления, в. том числе учитывающие ограничения на высшие производные. Система обеспечивае-1 монотонные и быстродёйствуккцие переходные процессы. Ее применение в системах управления пропанленными роботами повысит производительность обслуживающего оборудования и уменьшит динамические усилия на элементы конструкции робота (за . счет ограничений на высшие производные) , Последнее приводит к увеличению долговечности роботов, уменьшит их вес и габариты.
Формула изобретения
Система программного управления, содержащая блок сравнения,. первый вход которого соединен с первым выходом программно-задающего блока, блок управления следящим приводом, датчик положения, формирователь импульса и реверсивный счетчик, первый выход которого соединен с первым входом первого элемента ИЛИ, а первый и второй входы - с выходами соответственно первого и второго элементов И, подключенных первыми входс1ми КСоответствующим выходам триггера, т ли чающаяся тем, что, с целью повышения точности системы, в ,рее введены блок памяти, третий элемент И и последовательно соединенные четвертый элемент И, ре-, гистр, компаратор, второй элемент ИЛИ и генератор импульсов, выход которого подключен ко .вторым входам первого и второго элементов И, а второй вход через первый элемент ИЛИ0к первому входу третьего элемента И и ко второму выходу реверсивного счетчика, соединенного третьим выходом через блок памяти с первым входом блока; -упрайления ciieRfsafivt 5 приводом, а первым выходом-через формирователь импульса - с первым входом четвертого элемента И, второй вход которого соединен с выходом датчика положения и со вторым входом блока сравнения, подключенного
0 выходом ко второму входу- компаратора и к первому аходу третьего элемента И, выход которого соединен со-, вторым входом блока управления следящим приводом,, а второй выход-.
5 программно-задающего блока, и йыход компаратора соединены с соответствующими входами триггера.
Источнигки информации, принятые во внимание экспертизе
0
5 (прототип).
