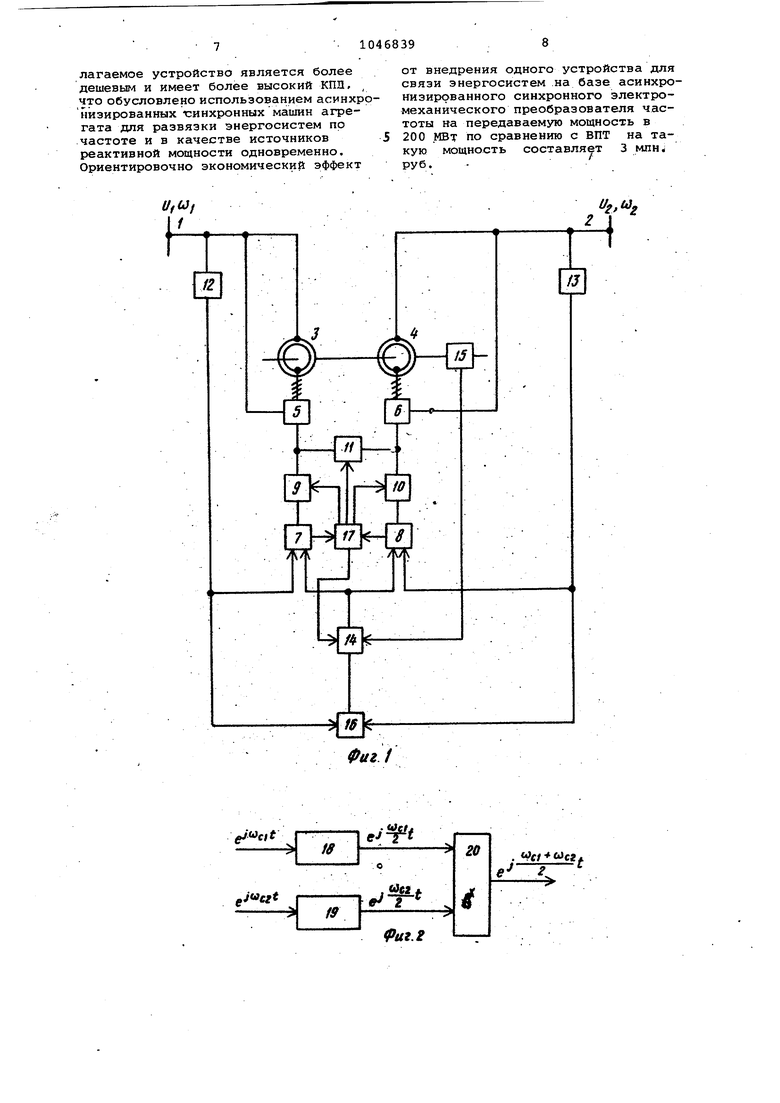
Изобретение относится к электротехнике, а именно к устройствам для связи источников переменного тока. Известно устройство для связи двух энергосистем, содержащее две асинхронизированные синхронные машины с жестко соединенньпад валами, статорные обмотки каждой из которых подключены к своейэнергосистеме, управляемыйпреобразователь частоты регулятор с блоком формирования функ ции резулирования и блоком разностной частоты, датчики частот обеих энергосистем,причем датчик частоты первой энергосистемы соединен с входом блока разностной ч,астотырегулятора,- а выход регулятора подключен к входу преобразователя частоты, при этом в качестве датчиков частоты использованы датчики половинной- част ты, роторные обмотки соединены между собой с противоположным чередованием фаз, к общим точкам соединения этих обмоток подключена выходы управляемого преобразователя-частоты, а выход датчика частоты второй эне госистемы соединен с входом блока формирования функции регулирования регулятора flj, Данйое устройство обеспечивает независимое регулированиечастот связываемых энергосистем. Однако в силу невозможности разделения каналов управления регулирование активных мощностей машин, а также напряжений (реактивных мощностей ) машин может осуществляться лишь связно По этой причине оно не может обеспечить локализацию возмущений в пределах одной энергосисте№Л. Поэтому, несмотря на то, что устройство позво ляет обойтись одним управляемым преобразователем частоты, одним комплек том контактных колец и одним регулят ром, его применение ограничено. Кро ме того, при выходе из-строя одного из указанных элементов необходимо устройство отключать от связываемых энергосистем, что .ведет к нарушению передачи заданного йотока активной мощности. - ; . . Наиболее близким к предлагаемому является устройство для связи двух эне госистем, содержащее две асинхронизиро ванные синхронные .машины .с жестко соединенными валами, статорные обмот ки которых подключены к СООТвеТ- ств.ующим энергосистемам, управляемые преобразователи частоты, измеритель скорости вращения вала, датчики частоты и напряжения на шинах связываеjviHx энергосистем,- датчик активной мощности межсистемной связи и регуляторы возбуждения, входы одного из которых подсоединены к датчикам частоты и напряжения, к измерителю скорости вращения вала и к датчику активной мощности, входы другого подсоединены к датчикам частоты и напряжения и к измерителю скорости вращения вала, а выход регуляторов возбуждения подсоединен к управляемому преобразователю частоты каждой из машин. При этом каналы управления четырьмя параметрами режима устройства {активной мощностью, скоростью вращения вала агрегата и напряжениями двух машин ) содержат пропорцирнально-интегрально-дифференциальные. (ПИД регуляторы 2 J. Изв-естиое устройство-обеспечивает независимое регулирование частот связываемых энергосистем. Кроме то.го, благодаря наличию двух регуляторов возбуждения с ПИД регуляторами и дв.ух управляемых преобразователей частоты, удается осуществить разделение каналов управления обеих машин, т.е. независимое регулирование .потока активной мощности через устройство, скорость вращения вала агрегата и напряжений на адинах машин. . Указанное устройство обладае.т тем недостатком, что при выходе из строя одного из регуляторов во избежание дальнейшего развития аварии соответствующую машину агрегата необходимо отключать от энергосистемы. Например, если отказал блок питания, управляклций сигнал на выходе регулятора нулевой, поэтому обмотки возбуждения через управ- . ляемый преобразователь частоты окажутся в короткозамкнутом режиме. Но на этот режим асинхронизирован-. ная синхронная машина не -расчитана по условияЕМ нагрева и электродинамической устойчивости,. При этом другая электрическая машина переводится в режим асинхррнизированного синхро;нного компенсатора. Все это приводит, к невозможности передачи актив- . ной мощности из одной энергосистемы в другую. Цель изобретения - повышение надежности устройства. Поставленная .цель достигается. тем, что устройство для связи двух. энергосистем, содержащее две асинхрони.зированные синхронные машины с ;. жестко соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, управляемые преобразователи частоты, датчик углового положения вала агрегата, датчики частот связываемый энергосистем и регуляторы возбуждения с двумя входами каждый, при этом обмотки возбуждения машин подключе.ны к выходам своих управляемых преобразователей частоты, первый вход каждого регулятора возбуждения соединен с выходом датчика частоты своей энергосистемы, а выходы регуляторов связанн с управляющими входами своих преобразователей часто7;ы, снабжено блоком формирования гармонических сигналов полусуммы частот связываемых энергосистем, блоком контроля регуляторов возбуждения и четырьмя коммутаторами, при этом первый и второй входы блока формирования гар монических сигналов полусуммы частот соединены соответственно с датчиками частот энергосистем, первый вход первого коммутатора соединен с выходом датчика углового положения вала агрегата, второй - с выходом блока формирования гармонических сигналов полусуммы частот связываемых энергосистем, управляющий вход первого коммутатора - с пе вым выходом блока контроля регулятора возбуждения-, выход вышеука-занного коммутатора - -с вторыми входам регуляторов возбуждения, первые выходы ко-торых соединены с управляемыми преобразователями частоты соот ветственно через второй и третий ком таторы/ управляющие входы кото рых соединены соответственно с вторым и третьим выхода блока контроля регуляторов возбуждения, вто-рые выходы регуляторов возбуждения соединены соответственно с первым и вторым- входами блока контроля регуляторов возбуждения, четвертый выход которого подсоединен к управляю щему входу четвертого коммутатора, соединяющего..С1равляющие входы пре образователей/частотал и обеспечиваю щего взаимно обратное чередование фаз обмоток возбужиения машин. Кроме того, блок формирования га монических сигналов полусуммы час-; тот связываемых энергосистем содержит элемент произведения и два элемента половиннойчастоты, выходы ко . торих соединены с входами элемента произведения.. На фит. 1 представлена схема npeiq лагаемого устройства; на - . обобщенная схема блока формирования гармонических сигналов полусуммы частот связываемых энергосистем; на фиг.З - пример выполнения блока формирования гармонических сигналов полусуммы частот, при двухфазных обмотках возбуждения мащин. Устройство для связи двух энерго систем 1 и 2 состоит из двух асинхронизированн х синхронных машин 3 и с жестко соединенными валами, обмотки роторов машин 3 и 4 через управ.ляемые- преобразователи 5 и 6 частоты, соединены с источниками возбуждения, например, со статорными цепями асинхронизированных синхронных ма шин 3 и 4. Управляющие входы преобразователей 5 и б частоты соединены с выхо..дами регуляторов 7 и 8 возбуждения .через коммутаторы 9 и 10 соответстве но, а также между собой с взаимно обратным чередованием фаз через коммутатор 11. Первые входы регуляторов 7 и 8 возбуждения соединены с датчиками 12 и 13 частоты соответствующих энергосистем 1 и 2, а вторые входы подключены к выходу комментатора 14. Первйй вход коммутатора 14 подключен к датчику 15 углового положения вала агрегата/ второй вход - к выходу блока 16 формирования гармонических сигналов полусуммы частот связываемых энергосистем, входы которого подключены к датчикам 12 и 13 частоты энергосистем 1 и 2. Управляющий вход коммутатора 14 соединен с первым йыходом блока 17 контроля регуляторов возбуждения, второй и третий выходы которого соединены соответственно с управляющими входами ком-. мутаторов 9 и 10, а четвертый выход подсоединен к управляющему входу коммутатора 11. Первый и второй входы блока 17 контроля регуляторов возбуждения подключены соответств.енно к вторым выходам регуляторов 7 и 8 возбуждения. Предлагаемое устройство работает следующим образом. В н.ор 1альном режиме, когда регуляторы 7 и 8 исправны, блок 17 контроля регуляторов возбуждения на выходах вырабатывает сигналы, что коммутатор 14 подключает к вторым входам регуляторов 7 и 8 выход датчика 15 углового полохсения вала агрегата, а выход блока 16 .формировани.я гармонических сигналов полусуммы частот связываемых энергосистем отключен, коммутаторы 9 и 10 включены, а коммутатор 11 отключен. При этом все ре- : жимы устройства для связи двух энергосистем аналогичны режимам устройства-прототипа, т.е. обеспечивается . независимое регулирование параметрами режима: активной мощностью устройства, скоростью вращения вала агрегата н напряжениями машин. Управляющие сигналы на выходах регуляторов 7 и 8 возбуждения по сигнаам датчика 9 углового положения, ваа агрегата и датчиков 12 и 13 частоты энергосистем 1 -и 2 имеют частоту . . ( . (2 де R частота вращения вала; (. ,c2 стоты связываемых энергосистем, (W- . частоты скольжения асиихронизированных синхронных машин относительно своих энергосистем. При выходе из строя какого-либо егулятора (7 или 8 ) возбуждения, его второго выхода поступает игнал на блок 17 контроля регуляоров возбуждения. С первого выхода лока 17 контроля регуляторов возбуждения .подается сигнал на управляющий вход коммутатора 14. При этом ко.мутатор 14 отключает выход датчика 15 углового положения вала агрегата и подключает выход блока 16 формирования гармонических сигналов полусуммы частот связываемых энергосистем к вторым входам регуляторов 7 и 8 возбуждения. С второго или третьего выхода блока 17 контроля регуляторов возбуждения (в зависимости
от того, какой регулятор неисправен поступает сигнал на управляющий вход коммутатора 9 или 10 на отключение неисправного регулятора 7 или 8 от
входа управляемого преобразователя 5 или 6 частоты соответственно. Сигнал счетвертого выхода блока 17 включает коммутатор 11. Тем самым происходит объединение управляющих цепей преобразователей 5 и 6 частоты с взаимно обратным, чередованием фаз, т.е. сигнал с выхода исправного регулятора поступает на оба управляемых преобразователя частоты 5 и б Блок 14 контроля регуляторов возбуждения распознает нормальные режимы от аварийных, т.е. производит диагностику регуля.торов.
Например, нормальный режим определяется по наличию нормальных уровней напряжений на выходах блока питания регулятора и по симметрии выходных гармонических сигналов регуляторов . Симметрия может быть оценена простым суммированием гармонических сигналов трех фаз выхода - суммарный сигнал должен быть нулевым. Если машины имеют двухфазные обмотки, то для контроля симметрии управляющие сигналы преобразуются в 3-фазный сигнал и т.д.
В блок 17 контроля регуляторов могут быть заложены различные принципы диагностики.
Блок 16 формирования гармонических сигналов полусуммы частот связываемых энергосистем содержит два элемента 18 и 19 половинной частоты энергосистем, которые могут быть выполнены, например, как в fl, и элемент 20 произведения (фиг.2). На входы элементов 18 и 19 половинной частоты поступают с выходов датчиков 12 и 13 частот энергосистем гармонические сигналы е и е выходов элементов 18 и 19 гармоничесj iкие сигналы g ; и g поступают
на входа элемента 20 произведения, свыхода КОТОРОГО гармонические сигна - w J.
-С-1 JL
ЛЫ J55
поступают через комму2
е
та тор 14 на вторые входы регтляторов 7 и 8 (.они в регуляторы 7 и 8 подаются вместо гармонических сигнаnoBg а от датчика 15 углового положения вала агрегата ). Пусть, например, неисправен регулятор 7. Тогда на входы регулятора 8 возбуждения поступают гармонические, сигналы
;) блока 16 дато iс
чика 13. Аргументы этих гармониче-ских сигналов в регуляторе S возбуждения вычитаются и на выходе получают гармонические сигналы управления частоты скольжения машин 4:
. , .%,, . . .. ju;,, t )2 iг
В е е е
(3)
т.е. . частота скольжения
машин 4 равна полуразности частот связываемых энергосистем. Но так как управляющие входы преобразователей 5 и 6 частоты через коммутатор 11 соединены с взаимно обратным чередованием фа:з, то для маши-ны 3 получают .
Ч t -J %
8 б е (4)
Из (3-4 ) следует/ что частоты скольжения машин 3 и 4 равны по величиQ не полуразности частот связыйаемых энергосистем, но имеют противоположные направления вращения. Это- обеспечивает условие связи двух энерго- систем с различающимися частотами:
с..,
fl(- f2r f-..-%2t
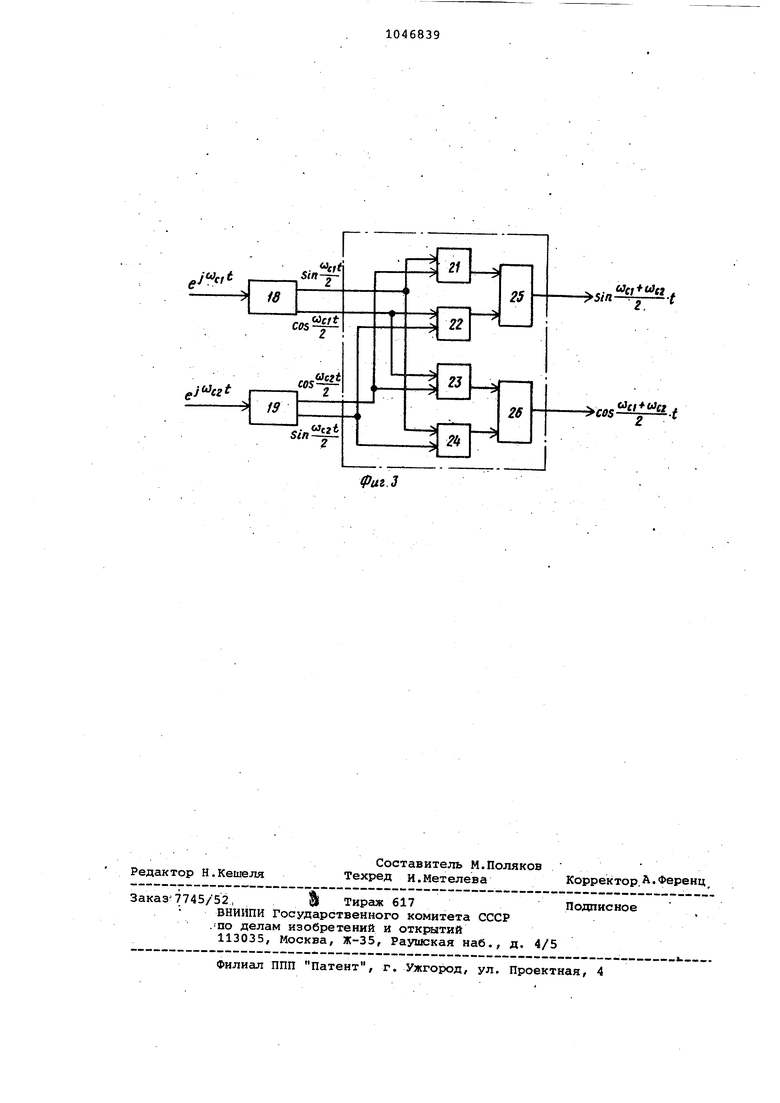
На фиг.3 в качестве примера приве0 дена схема блока фoiэмиpoвaния гармони 1еских сигналов полусуммы частот связываемых энергосистем при двухфазных машинах.При этом применены перемножители 21-24 и сумматоры 25 и 26,
5 перемножающие и складывающие тригонометрические функции.
Из изложенного следует, что в ава рийной ситуации при выходе из строя одного из регуляторов предлагаемое
п устройство позволяет без переделок исправного регулятора возбуждения перейти на управление от него обеими машинами. При этом использ.уется соединение управляющих входов преобразователей частоты с взимно обратным чередованием фаз.
Таким образом, предлагаемой устройство повышает надежность энергоснабжения потребителей по сравнению с прототипом за счет сохранения
0 устройства в работе при выходе-из строя регулятора одной из машинагрегата. По сравиению с применяющимся в настоящее время устройством для связи энергосистем.на основе
5 вставки постоянного тока ВПТ предлагаемое устройство является более дешевьпЛ и имеет более высокий КПД, что обусловлено использованием асинхр Гшзированных синхронных машин агрегата для развязки энергосистем по частоте и в качестве источников реактивной мощности одновременно. Ориентировочно экономический эффект от внедрения одного устройства для связи энергосистем на базе асинхронизированного синхронного электромеханического преобразователя частоты на передаваемую мощность в 200 .МВт по сравнению с ВПТ на тасоставляет 3 млн. кую мощность руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1598043A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для связи двух энергосистем | 1976 |
|
SU647793A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
1. УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ, содержащее две асинхронизированные синхронные машины с жестко соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, управляемые преобразователи частоты/ датчик углового положения вала агрегата, датчики частот связываемых энергосистем и регуляторы возбуждения с двумя входами каждый, при этом обмотки возбуждения машин подключены к выходам своих упргшляемых преобразователей частоты, первый вход каждого регулятора возбуждения соединен с выходом датчика частоты своей энергосистемы, а выходы регуляторов связаны с управляющими входами своих преобразователей частоты, отличающее С я тем, что, с целью повышения надежности, бно снабжено блоком формирования гармонических сигналов полусуммы частот связываемых энергосистем, блоком контроля регуляторов возбуждения и четырьмя коммутатора ш, при этом первый и второй входы блока формирования гармонических сигналов полусуммы частот соединены соответственно с датчиками частот энергосистем, первый вход первого коммутатора соединен с выходом датчика углового положения вала аг. регата, второй - с выходом блока формирования гармонических сигналов полусуммы частот связываемых энергосистем, управляющий вход первого коммутатора .- с первым выходом .блока контроля регулятора возбуждения, выход вышеуказанного коммутатора - с вторыми входами регуляторов возбуждения, первые выходы которых соединены с .управляемыми .преобразователями частоты соответственно через второй и третий коммутато№1, управт ляющие входы которых соединены соответственно с вторым и третьим выходами блока контроля регуляторов возбуждения, вторые выходы регуляторов возбуждения соединены .соответственно с первым и вторым входами блока контроля регуляторов возбуждения, четвертый выход которого подсоединенк управляющему входу четвертого комму татора, соединяющего управляющие входы преобразователей частоты с 05 взаимно обратным чередованием фаз. оо со со 2. Устройство по П.1, о т л ичающееся тем, что блок формирования гармонических сигналов полусуммы частот связываемых энергосистем содержит элемент произведения и два элемента половинной частоты, выходы которых соединены с входами элемента произведения.
фиг 1
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для связи двух энергосистем | 1976 |
|
SU647793A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 762087, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
