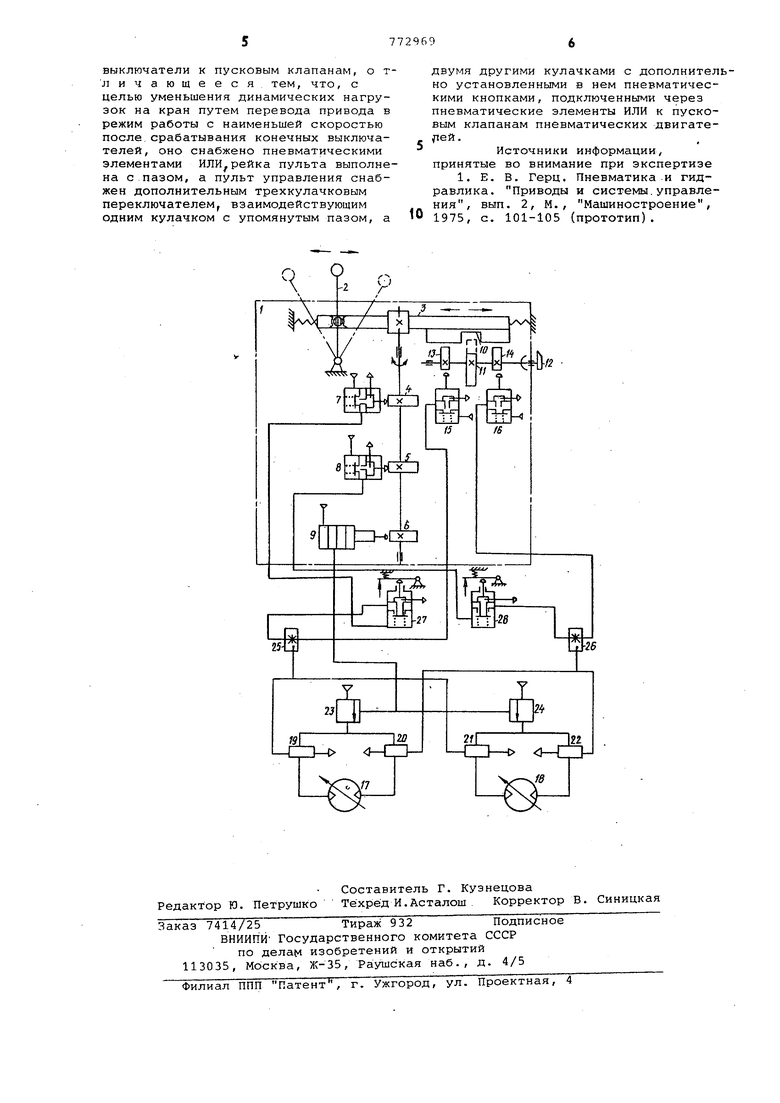
Изобретение относится к подъемнотранспортным машинам, а именно к уст ройствам управления.механизмами пере дзижения мостовых кранов с пневматиЧ€;ским приводом. Известно устройство для управлени механизмом передвижения.мостового крана с пневматическим приводом, содержащее пусковые и регулирующие кла пс.ны пневматических двигателей, конбчные выключатели и пульт управления рычажно-реечного типа с задатчиком скорости и пневматическими кнопками , выход которых подключен через конечные выключатели к пусковь клапанам, позволяющим управлять механиз мами передвижения мостового крана ил Грузоподъемной тележки с бесступенчатой регулировкой скорости. Устройство осуществляет автоматическую остановку крана при подходе его к концевому упору путем воздействия на конечный выключатель кулачком, установленным перед упором. При этом командная линия к пусковым клапанам от секается от источника питания и соед няется с атмосферой, пусковые клапан закрываются и двигатели механизма ос танавливак1тся ij . Недостатком этого устройства является то, что после срабатывания конечных выключателей кран невозможно остановить в требуемом месте, что приводит к удару крана буферами по концевым упорам и, следовательно, к возникновению значительных дополнительных динамических нагрузок не кран Целью изобретения является уменьшение динамических нагрузокна кран путем перевода привода в режим работы с наименьшей скоростью после срабатывания конечных выключателей. Поставленная цель достигается тем, что устройство снабжено-пневматическими элементами ИЛИ, рейка пульта выполнена с пазом, а пульт управления снабжен дополнительным трехкулачковым переключателем, взаимодействующим одним кулачком с упомянутым па- зом, а двумя другими кулачками с дополнительно установленными в нем пневматическими кнопками, подключенными через пневматические элементы ИЛИ к пусковым клапанам пневматических двигателей, На чертеже изображена принципиальная схема устройства для управления
механизмом передвижения мостового Крана с раздельным приводом.
Устройство для управления механизмом передвижения- содержит пульт управления рычажно-реечного типа 1, в котором смонт;:ированы рычаг 2 управления, зубчато-реечная передача 3 с блоком кулачков 4, 5 и 6, взаимодейг ствующих с пневматическими кнопками 7 и 8 и задатчиком 9 скорости. В рейке 3 рычажно-реечного пульта выполнен паз 10, взаимодействующий с кулачком 11 дополн1 тельно смонтированного 3-х кулачкового переключателя 12, воздействующего двумя другими кулачками 13 и 14 на пневматические кнопки 15 и 16. Устройство включает также пневматические двигатели 17 и 18 с пусковыми клапанами 19-22 и регулирующими клапанами 23 и 24, пневматические элементы 25 и 26 ИЛИ и конечные выключатели 27 и 28, установленные на мосту крана. Кнопка 7 соединена каналами через конечный выключатель 27 и элемент 25 ИЛИ с пусковыми клапанами 19 и 21, а кнопка 8 через конечный выключатель 28 и элемент 26 ИЛИ с пусковыми клапанами 20 и 22. Задатчик 9 связан с регулирующими клапанами 23 и 24. Кнопка 15 подключена через элемент 25 ИЛИ с пусковыми клапанами 19 и 21, а кноцка 16 через элемент 26 ИЛИ с пусковыми клапанами 20 и 22.
Устройство работает-следующим об;разом.
При перемещении рычага 2, например вперед, рейка 3 поворачивает блок кулачков и кулачок. 6 воздействует на задатчик 9, а кулачок 4 на кнопку 7. Сигнал от задатчика 9, пропорциональный отклонению рычага 1 г поступает на регулирующие клапаны 23 и 24 которые выдают на пусковые клапаны давление, пропорциональное давлению задатчика 9 Одновременно сигнал от кнопки 7 через конечный выключатель 27 и элемент 25 ИЛИ пос гупает на пусковые клапаны 19 и 21, которые подают давление на двигатели, последние начинают вращаться, и кран начинает перемещаться При подходе крана к концевому кулачку, установленному на расстоянии максимального тормозного пути от упора, срабатывает конечный выключатель 27, который отсекает линию от кнопки 7 и соединяет камеры управления пусковых клапанрв 19 и 21 с атмосферой, клапаны закрываются, доступ сжатого воздуха на двигатель прекращается, двигатель останавливается, и кран под действием сил инерции в .зависимости от массы груза еще некоторое время перемещается, а затем под действием сил сопротивления останавливается. Для подвода крана в нужную точку, например вперед, необходимо рычаг 2 вернуть в нулевое положение и перевести переключатель 12 в положение вперед
кулачок 13 включает кнопку 15, сигнал от которой через элемент 25 ИЛИ поступает на управление пусковыми клапанами 19 и 21 и включает их. Одновременно кулачок 11 заходит в паз 10 рейки и ограничивает ее перемещение в пределах, обеспечивающих-минимальное давление на задатчике 9 -и соответственно минимальную скорость движения механизма.
Далее, при перемещении рычага 2 вперед в пределах, ограниченных пазом 10, осуществляется подача минимального давления от задатчика 9 на регулирующие клапаны 23 и 24, которые через ранее включенные клапаны 19 и 21 подают минимальное давление на двигатели 17 и 18, в результате чего происходит движение механизма с минимальной скоростью. При подходе крана к нужной точке рычаг 2 возвращают в нулевое положение, при этом задатчик скорости 9 возвращается в нулевое положение, регулирующие клапаны 23 и 24 закрываются-, подача давления на двигатели 17 и 18 прекращается, ai сигнал от кнопки 15 держит во включенном состоянии пусковые клапаны 19 и 21. В результате этого при перемещении .крана под действием сил инерции в линиях клапан 23-клапан 19двигатель 17 и клапан 24 - клапан . 21 - двигатель 18 создается разрежение, а в линиях двигатель 17 - клапан 20 и двигатель 18 - клапан 22 давление равно атмосферному, и на валу каждого двигателя возникает момент противоположный направлению вращения двигателя, т.е. двигатели переходят . в режим работы вакуум-насоса. Так как скорость перемещения минимальная, а силы сопротивления перемещению и тормозной момент двигателей, работающих в режиме вакуум-насоса, затормаживакндие кран, значительно превышают силы инерции, тормозной путь крана будет минимальным, и следовательно, .в случае наезда крана на упор динамические нагрузки незначительны.
Для перемещения крана в обратную сторону с рабочей скоростью достаточно вернуть переключатель 12 в нуле,вое положение и переместить рычаг 2 управления в положение назад.
При перемещении рычага назад устройство работает аналогично описанному.
Формула изобретения
Устройство для управления механизмом передвижения мостового крана с пневматическим приводом, содержащее пусковые и регулирующие клапаны пневматических двигателей, конечные выключатели и пульт управления рычажнореечного типа с з адатчиком скорости и пневматическими кнопками, выход которых подключен через конечные
выключатели к пусковым клапанам, о тличающееся тем, что, с целью уменьшения динамических нагрузок на кран путем перевода привода в режим работы с наименьшей скоростью после срабатьавания конечных выключателей, оно снабжено пневматическими элементами ИЛИ рейка пульта выполнена с пазом, а пульт управления снабжен дополнительным трехкулачковым переключателем, взаимодействующим одним кулачком с упомянутым пазом, а
Ч г 9
двумя другими кулачками с дополнительно установленными в нем пневматическими кнопками, подключенными через пневматические элементы ИЛИ к пусковым клапанам пневматических двигатеfiefi. Источники информации,
принятые во внимание при экспертизе 1. Е. В. Герц. Пневматика и гидравлика. Приводы и системы,управления, вып. 2, М., Машиностроение, 1975, с. 101-105 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления пневматическим приводом механизма передвижения крана | 1982 |
|
SU1024411A1 |
| Система управления транспортного средства | 1989 |
|
SU1781099A1 |
| Система управления реверсированием двигателя внутреннего сгорания | 1965 |
|
SU518156A3 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) ПРИВОД | 1992 |
|
RU2014525C1 |
| Устройство управления пневмодвигателем тали | 1983 |
|
SU1180349A1 |
| Прибор для определения тепломеханических свойств кожи | 1973 |
|
SU525013A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Устройство управления пневмодвигателем тали | 1986 |
|
SU1379246A2 |
| ГИДРОГАЗОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ | 1999 |
|
RU2167308C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОРШНЕВЫХ И СТРУЙНЫХ ПНЕВМОПРИВОДОВ ШАРОВЫХ КРАНОВ ТРУБОПРОВОДОВ | 2001 |
|
RU2194885C1 |
