Фи. f
;
Изобретение относится к подъемно- транспортному оборудованию, может, быть использовано для управления пневматическим приводом механизма подъема пневмотали и является усовершенствованием устройства по авт.св. 1180349..
Цель изобретения - повьшение безклапана ИЛИ 10, выходы которых соеди нены соответственно с пневмоприводами 15 и 14 тормозов. Второй вход пневмоклапана ИЛИ 10 соединен с выходом усилителя 18 и с управляющим входом пневмоклапана ИЛИ 9. Первый информационный вход распределителя 1 соединен одновременно с выходом раеопасности и увеличение долговечности. JQ пределителя 13 и с входом реле 7, а
462
клапана ИЛИ 10, выходы которых соединены соответственно с пневмоприводами 15 и 14 тормозов. Второй вход пневмоклапана ИЛИ 10 соединен с выходом усилителя 18 и с управляющим входом пневмоклапана ИЛИ 9. Первый информационный вход распределителя 12 соединен одновременно с выходом рае

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления пневмодвигателем тали | 1983 |
|
SU1180349A1 |
| Пневматическое устройство для дистанционного управления грузоподъемной машиной | 1985 |
|
SU1286832A1 |
| Пневматическая система управления тормозом шахтной подъемной машины | 1981 |
|
SU987216A1 |
| Пневматическое устройство для дистанционного управления горной машиной с двумя пневмоприводами | 1980 |
|
SU964132A2 |
| Устройство управления угольным комбайном с раздельными пневмоприводами режущего органа и подающей части | 1985 |
|
SU1273546A1 |
| Устройство для управления пневматическим приводом механизма передвижения крана | 1982 |
|
SU1024411A1 |
| Привод вертикального перемещения стола пакетирующего устройства | 1985 |
|
SU1375539A1 |
| Устройство управления горной машиной с пневмоприводом | 1980 |
|
SU918429A1 |
| Устройство для стабилизации нагрузки на долото | 1990 |
|
SU1761946A2 |
| Устройство для дозирования жидких химикатов | 1980 |
|
SU954960A2 |
Изобретение относится к области подъемно-транспортного машиностроения, а именно к устройствам для управления пневмодвигагелем тали. Цель изобретения - повышение безопасности и увеличение долговечности. Устройство содержит пусковые клапаны 1, 2, входы которых соединены с выходом регулирующего клапана 3, а выходы - с пневмодвигателем 4, конечные выключатели режимов 5 и 6, пороговые реле 7, 8, пневмоклапаны ИЛИ 9, 10, пневмоклапан НЕ 11, управляемые распределители 12, 13, пневмоприводы 14 и 15 основного и дополнительного тормозов, задатчики скорости спуска 16 и подъема 17, датчик усилия 19. Последний вьщает сигнал, пропорциональный нагрузке на канате, который поступает на второй управляющий вход распределителя 13. 2 ил. 11 i (Л L-& N)
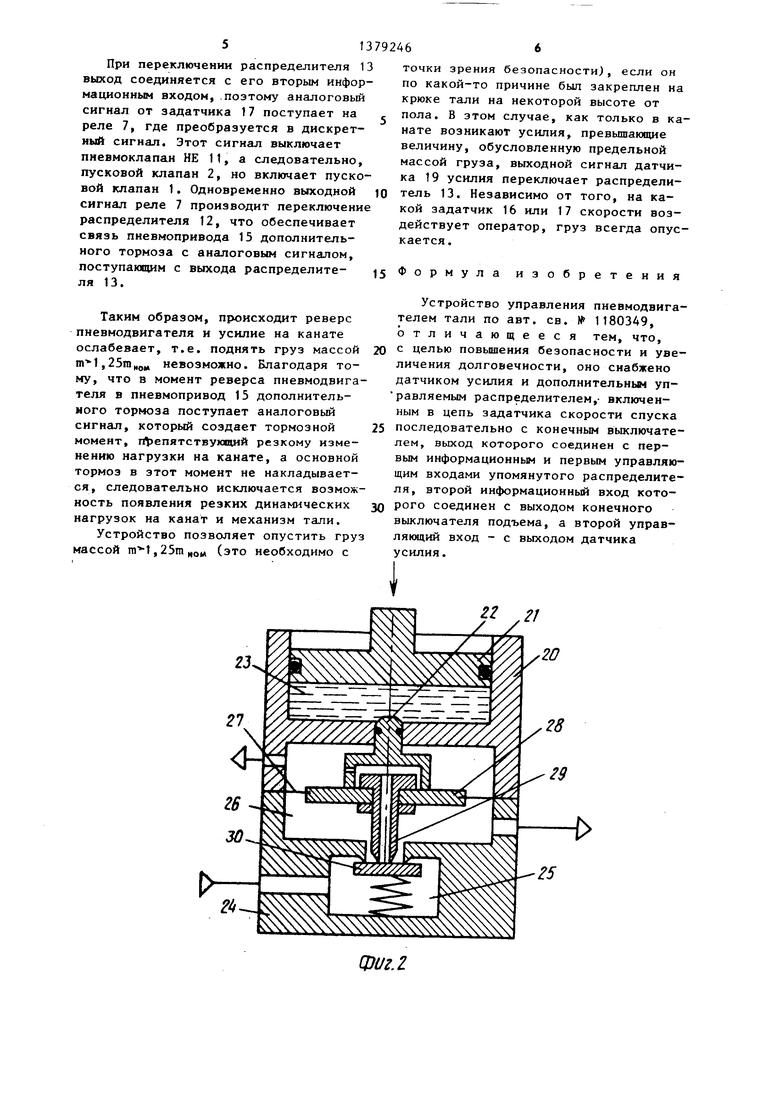
На фиг. 1 представлена принципиальная схема устройства управления пневмодвигателем тали; на фиг. 2 - датчик усилия, вариант выполнения.
Устройство управления пневмодвигателем тали содержит (фиг. 1) пусковые клапаны 1 и 2, входы которых соединены с выходом регулирукицего клапана 3, а выходы - с пневмодвигателем 4, конечные выключатели 5 и 6 режимов спуска и подъема, пороговые реле 7 и 8, пневмоклапаны ИЛИ 9 и 10, пневмоклапан НЕ 11, управляемые рас- рределители 12 и 13, пневмоприводы 14
второй информационный вход - с выхо дом пневмоклапана НЕ 11 и с входом пускового клапана 2 подъема.
Датчик 19 усилия (фиг. 2), состо
15 ит нз силоизмерительного элемента и пневматического преобразователя. Си лоизмерительный элемент состоит из корпуса 20 и двух поршней 21 и 22 с разными площадями, которые образуют
20 замкнутую полость 23, заполненную ж костью. Пневмопреобразователь состр из корпуса 24, камер питания 25 и выхода 26 и мембранного чувствитель ного элемента, состоящего из мем
15 основного и дополнительного тор- 25 браны 27, жесткого диска 28 и пои
мозов, задатчики скорости спуска 16 и подъема 17, пневматический усилитель 18 и датчик 19 усилия с пневматическим выходньм сигналом.
лого штока 29. В камере 25 располож на подпружиненная заслонка 30.
Поршень 22 с меньшей площадью вз имодействует через шток 29 с заслон
Задатчики 16 и 17- скорости распо- ЗО поршень 21 с большей плоложены в пульте дистанционного управления и соединены с конечными выключателями 5 и 6. Управляемый распределитель 13 включен в цепь задатчика 16 скорости спуска последовательно с конечным выключателем 5. Выход конечного выключателя 5 соединен с перв ым информационным и первым управляющим входами распределителя 13, а выход конечного выключателя 6 - с вторым информационным входом распределителя 13, второй управляющий вход которого соединен с выходом датчика 19 усилия. Один из входов первого пневмоклапана ИЛИ 9 соединен с выходом конечного выключателя бис входом порогового реле 8 цепи задатчика 17 подъема, а второй вход - с выходом распределителя 13 и входом реле 7 задатчика 16 спуска.Выход пневмоклапана ИЛИ 9 со35
40
45
щадью кинематически взаимодействует с канатом пневмотали (не показано).
Устройство работает следующим об разом.
Подъем груза, масса которого не превьшает допустимую, происходит пр воздействии на задатчик 17 скорости при этом выходной аналоговый сигнал поступает через концевой выключател 6 на реле 8, где преобразуется в ди кретный сигнал, который поступает на вход пневмоклапана ИЛИ 10 и упра лякяций вход распределителя 12, кото рый включается и его дискретный выходной сигнал идет на растормажива- ние дополнительного .тормоза, а выхо клапана ИЛИ 10 - на растормаживание основного тормоза.
Одновременно аналоговый сигнал.с выхода концевого выключателя 6 пост
единен с входом регулирующего клапана 3, пает через клапан ИЛИ 9 на регулиВыход реле 7 соединен с первым управляющим входом распределителя 12, а через пневмоусилитель 18 соединен с управляю1цим входом пневмоклапана НЕ 11 и с входом пускового клапана 1 спуска. Выход реле 8 соединен с вторым управляющим входом распределителя 12 и первым входом второго нневмовторой информационный вход - с выходом пневмоклапана НЕ 11 и с входом пускового клапана 2 подъема.
Датчик 19 усилия (фиг. 2), состо15 ит нз силоизмерительного элемента и пневматического преобразователя. Си- лоизмерительный элемент состоит из корпуса 20 и двух поршней 21 и 22 с разными площадями, которые образуют
20 замкнутую полость 23, заполненную жидкостью. Пневмопреобразователь сострит из корпуса 24, камер питания 25 и выхода 26 и мембранного чувствительного элемента, состоящего из мемлого штока 29. В камере 25 расположена подпружиненная заслонка 30.
Поршень 22 с меньшей площадью взаимодействует через шток 29 с заслон
щадью кинематически взаимодействует с канатом пневмотали (не показано).
Устройство работает следующим образом.
Подъем груза, масса которого не превьшает допустимую, происходит при воздействии на задатчик 17 скорости, при этом выходной аналоговый сигнал поступает через концевой выключатель 6 на реле 8, где преобразуется в дискретный сигнал, который поступает на вход пневмоклапана ИЛИ 10 и управ- лякяций вход распределителя 12, который включается и его дискретный выходной сигнал идет на растормажива- ние дополнительного .тормоза, а выход клапана ИЛИ 10 - на растормаживание основного тормоза.
Одновременно аналоговый сигнал.с выхода концевого выключателя 6 поступает через клапан ИЛИ 9 на регулипает через клапан ИЛИ 9 на регули
руюсций клапан 3. В исходном состоянии пневмоклапана НЕ 11, когда входной сигнал в управляющей камере отсутствует, на выходе его есть пневматический сигнал, который поступает на второй информационный вход распределителя 12 и одновременно включает клапан 2 подъема.
Таким образом, регулирующий клапан 3 пода т сжатый воздух через открытый пусковой клапан 2 на один из входов пневмодвигателя 4. Величина давления на выходе регулирующего клапана 3, а следовательно, скорость подъема груза пневмотали, пропорциональны управляющему аналоговому сигналу, величина которого зависит от усилия воздействия на задатчик 17 скорости.
Остановка груза в промежуточных положениях осуществляется при снятии усилия с задатчика 17 скорости. При зтом исчезает аналоговый сигнал и регулирующий клапан 3 выключается, двигатель постепенно останавливается и после срабатывания реле 8 переключается распределитель 12 и пневмоклапан ИЛИ 10. При этом накладываются оба тормоза. Пусковой клапан 2 остается включенным выходным сигналом пневмоклапана НЕ 11.
Благодаря тому, что пусковой кла- пан 2 остается включенным в момент выключения регулирующего клапана 3 до момента накладывания тормоза, двигатель переходит в компрессорный режим, исключая самопроизвольное опус- кание груза.
При переподъеме груза срабатывает конечный выключатель 6. Аналоговый сигнал из управляющей камеры регулирующего клапана 3 и из реле 8 стравливается в атмосферу через концевой вьо лючатель 6. При этом в устройстве происходят изменения, аналогичные изменениям при снятии усилия с задатчика 17 скорости.
Спуск груза происходит при воздействии на задатчик 16 скорости, при этом аналоговый сигнал поступает через концевой выключатель 5 и нормально открытый контакт распределителя 13 на реле 7, где преобразуется в дискретный сигнал. Усиленный по мощности в усилителе 18 этот сигнал включает пусковой клапан 1, выключает пневмо- клапан НЕ 11, а следовательно, и пусковой клапан 2, через пневмоклапан ИЛИ 10 растормаживает основной тормоз
Одновременно аналоговый сигнал с выхода распределителя 13 проходит чер«з распределитель 12 к дополнительному регулируемому тормозу 15 и через первый пневмоклапан ИЛИ 9 к регулирующему клапану 3. При этом включается регулирующий клапан 3 и
о
5 Q
с
5
0
0
5
растормаживается дополнительньв1 тормоз.
Однако благодаря тому,, что в дополнительный тормоз поступает аналоговый сигнал, происходит только частичное его растормаживание. При этом пневмопривод 15 тормоза создает тормозной момент, препятствующий резкому опусканию груза в момент снятия основного тормоза.
Скорость спуски груза зависит как от величины давления на выходе регулирующего клапана 3, так и от тормозного усилия, развиваемого пневмоприводом 15 дополнительного тормоза, т.е. скорость спуска груза пневмотали пропорциональна управляющему аналоговому сигналу.
Так работает устройство, если масса груза не превышает допустимую величину.
Контроль массы груза осуществляется датчиком 19 усилия, силоизмеритель- ный элемент которого воспринимает усилие в канате от поднимаемого груза (не показано).
В момент отрыва груза от земли усилие каната воздействует на поршень 21 датчика 19 усилия и через жидкость полости 23 воздействует на поршень 22 с меньшей площадью, который в свою очередь воздействует через диск 28 и полый шток 29 на заслонку 30.
Усилие, воспринимаемое мембранные чувствительным элементом (диском 29) от воздействия груза, обратно пропорционально площадям поршней 21 и 22, так как жидкость практически несжимаема, и а установившемся режиме уравновешивается усилием от давления в камере 26 выхода.
Таким образом, датчик 19 усилия выдает пневматический сигнал, пропорциональный нагрузке на канате, кото- рьй поступает на второй управляющий вход распределителя 13.
При подъеме в момент отрыва груза от земли, масса которого превьш1ает допустимую, и при достижении уровня выходного сигнала датчика 19 усилия порога срабатывания распределителя 13 происходит его переключение. Датчик 19 настраивается так, что величина его выходного сигнала, соответствующая порогу срабатывания переключателя 13, достигает при массе груза в 1,25 раз больше номинальной грузоподъемности (,25т„о ) .
Таким образом, происходит реверс пневмодвигателя и усилие на канате ослабевает, т.е. поднять груз массой ,25тном невозможно. Благодаря тому, что в момент реверса пневмодвигателя в пневмопривод 15 дополнительного тормоза поступает аналоговый сигнал, который создает тормозной момент, п)епятствукяций резкому изменению нагрузки на канате, а основной тормоз в зтот момент не накладывается, следовательно исключается возможность появления резких динамических нагрузок на канат и механизм тали.
Устройство позволяет опустить груз массой , (это необходимо с
23
Устройство управления пневмодвига- телем тали по авт. св. № 1180349, отличающееся тем, что, с целью повышения безопасности и увеличения долговечности, оно снабжено датчиком усилия и дополнительным уп- равляемым распределителем,- включенным в цепь задатчика скорости спуска последовательно с конечным выключателем, выход которого соединен с первым информационным и первым управляющим входами упомянутого распределителя, второй информационный вход которого соединен с выходом конечного выключателя подъема, а второй управляющий вход - с выходом датчика усилия.
20
| Устройство управления пневмодвигателем тали | 1983 |
|
SU1180349A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
