Изобретение относится к области подъемно-транспортного оборудова- . ния, а именно к устройствам управления пневматическими приводами пневмоталей, и может быть использовано для управления пневматическим приводом механизма подъема пневмотали.
Целью изобретения является повышение надежности управления при спуске груза.
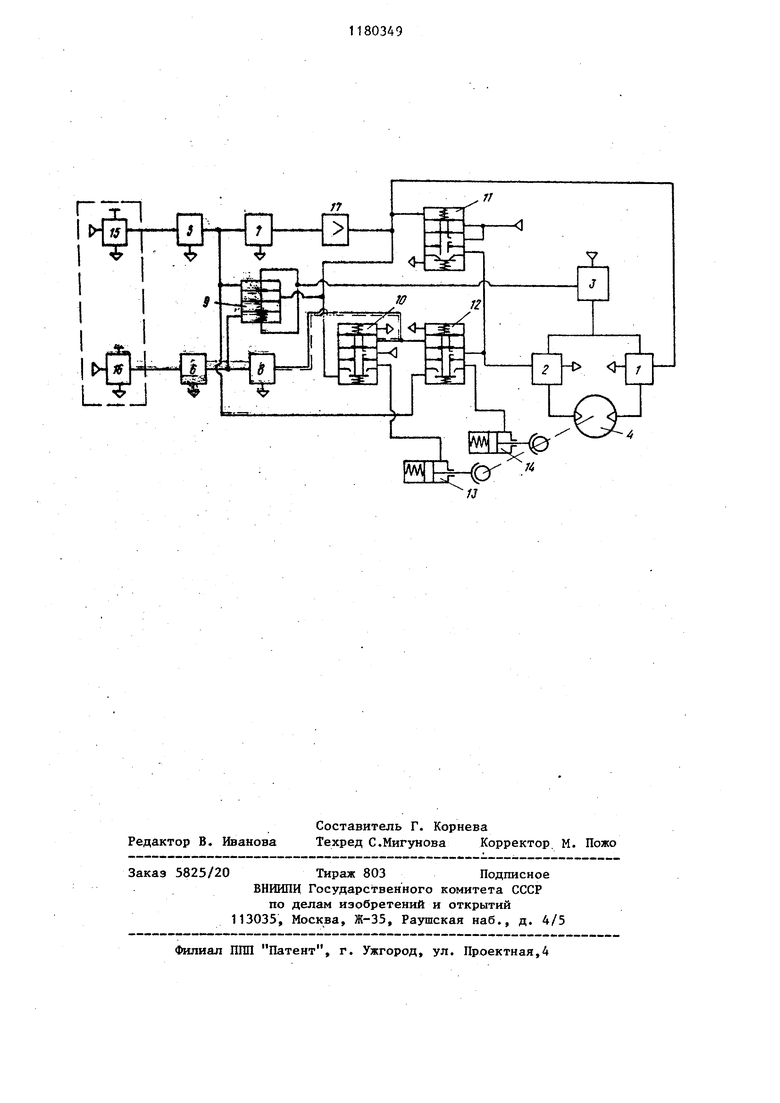
На чертеже представлена схема
устройства управления пневмодвигаI
телам тали.
Устройство содержит пусковые клапаны 1 и 2, входы которых соединены с выходом регулирующего клапана 3, а выходы - с пневмодвигателем 4, конечные выключатели режимов (спуска) 5 и (подъема) 6, пороговые реле 7 и 8, пневмоклапаны ИЛИ 9 и 10, пневмоклапаны НЕ 11, управляемьй распределитель 12 тормоза (без позиций) с пневмоприводами 13 и 14, задатчики скорости спуска 15 и подъема 16, пневматический усилитель 17.
Задатчики 15 и 16 скорости расположены в пульте дистанционного управления и соединены с конечными выключателями 5 и 6. Входы первого. пневмоклапана ИЛИ 9 соединены с выходами конечных выключателей 5 и 6 и с входами реле 7 и 8, а выход пневмоклапана 9 ИЛИ - с входом регулирующего клапана 3.
Выход реле 7 через пневмоусилитель 17 соединен с управляющим входом пневмоклапана НЕ 11 и с входом пускового клапана 1 спуска, а выход реле 8 соединен с управляющим входом распределителя 12 и входом второго пневмоклапана ИЛИ 10, выходы которых соединены соответственно с пневмоприводами 14 и 13 тормозов. Второй вход дневмоклапана ШШ 10 соединен с выходом усилителя 17 и с управляющим входом клапана ИЛИ 9. Первый информационньй вход распределителя 12 соединен одновременно с выходом концевого выключателя спуска 5 и с входом реле 7, а второй информационный вход - с Ьыходом клапана НЕ 11 и с входом пускового клапана 2 подъема.
Устройство работает следующим образом.
При воздействии, например, на задатчик 16 скорости выходной аналоговый сигнал поступает через концевой выключатель 6 на реле 8, где преобразуется в дискретный сигнал, который поступает на вход пневмоклапана ИЛИ 10 и управляющий вход распределителя 12, который включается и его дискретньш выходной сигнал идет на растормаживание дополнительного тормоза, а выход клапана ИЛИ 10 - на растормаживание основного тормоза.
Одновременно, аналоговый сигнал с выхода концевого выключателя 6 поступает через клапан ИЛИ 9 на регулирующий клапан 3.
В исходном состоянии пневмоклапана НЕ 11, когда входной,сигнал в управляющей камере отсутствует, на выходе его есть пневматический сигнал, который поступает на второй информационный вход распределителя 12 и одновременно включает клапан 2 подъема.
Таким образом, регулирующий клапан 3 подает сжатый воздух через открытый пусковой клапан 2 на один из входов пневмодвигателя 4. Величина давления на выходе клапана 3, а следовательно, и скорость подъема груза пневмотали будут пропорциональны управляющему аналоговому сигналу, величина которого зависит от усилия воздействия на задатчик 16 скорости.
Остановка груза в промежуточных положениях осуществляется при снятии усилия с задатчика 16 скорости. При этом исчезает аналоговый сигнал и регулирующий клапан 3 выключается, двигатель постепенно останавливается и после срабатывания реле 8 переключается распределитель 12 и пневмоклапан ИЛИ 10. При этом накладьшаются оба тормоза. Пусковой клапан 2 остается включенным вьбсодным сигналом пневмоклапана НЕ 11.
Благодаря тому, что пусковой клапан 2 остается включенным в момент выключения регулирующего клапана 3, до момента накладывания тормоза двигатель переходит в компрессорный режим, исключая самопроизвольное опускание груза.
Кроме этого, устройство обеспечивает компрессорный режим двигателя перед началом движения груза на подъем в момент снятия основного и дополнительного тормозов и,таким образом, исключает возможность таксго положения, при котором груз вмес то того, чтобы подниматься, начинае опускаться. При переподъеме груза срабатывает концевой выключатель 6, Аналоговый сигнал из управляющей камеры регулирующего клапана 3 и из реле 8 стравливается в атмосферу. При этом в устройстве происходят изменения аналогичные изменениям пр снятии условия с задатчика 16 скорости. Спуск груза происходит при воздействии на задатчик 15 скорости, при этом аналоговый сигнал поступает через концевой выключатель 5 на реле 7 сравнения, где преобразуется в дискретный сигнал. Усиленный по мощности в усилитель 17 этот сигнал производит следующие переключения: включает пусковой клапан 1, выключает клапан НЕ 11, а следовательно, и пусковой клапан 2, через клапан ИЛИ 10 растормаживает основной тормоз. Одновременно аналоговый сигнал проходит через распределитель 12 к дополнительному регулируемому тормозу 14 и через первый клапан ИЛИ 9 - к регулирующему клапану 3. При этом включается регулирующий клапан 3 и растормаживается дополнительный тормоз. Однако, благодаря тому, что в дополнительный тормоз поступает 94 аналоговый сигнал, происходит только частичное его растормаживание.При этом этот тормоз создает тормозной момент, препятствующий резкому опус- канию груза в момент снятия основного тормоза. Таким образом, скорость спуска груза будет зависить как от величины давления на выходе регулирующего клапана 3, так и от тормозного усилия, развиваемого дополнительным тормозом, т.е. скорость спуска груза пневмотали будет пропорциональна управляющему аналоговому сигналу, величина которого зависит от усилия воздействия на задатчик 15 скорости. Таким образом, предлагаемое устройство управления пневмодвигателем включает резкие спуски груза и позволяет производить плавный спуск груза любой массы (в пределах грузоЯодъемности пневмотали) с регулированием скорости от максимальной до ползучей с плавным торможением в момент остановки, что повышает безопасность эксплуатации. Переход от максимально возможной транспортной скорости вертикального перемещения груза к малым посадочным скоростям резко увеличивает точность загрузки, сокращает время на установку груза, что значительно повьшгает производительность труда при выполнении погрузочно-разгрузочных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления пневмодвигателем тали | 1986 |
|
SU1379246A2 |
| Система управления механизмом подъема пневматического крана | 1974 |
|
SU520319A1 |
| Пневматическое устройство для дистанционного управления грузоподъемной машиной | 1985 |
|
SU1286832A1 |
| Устройство для управления пневматическим приводом механизма передвижения крана | 1982 |
|
SU1024411A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОПРИВОДОМ ТАЛИ | 2005 |
|
RU2309113C1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| Пневматическое устройство для дистанционного управления горной машиной с двумя пневмоприводами | 1980 |
|
SU964132A2 |
| Устройство для управления механизмом передвижения мостового крана с пневматическим приводом | 1978 |
|
SU772969A1 |
| Устройство автоматического управления агрегатом гарантированного питания | 1989 |
|
SU1765481A2 |
| Устройство для управления пневматическим двигателем гразоподъемного механизма | 1976 |
|
SU609721A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОДВИГАТЕЛЕМ ТАЛИ, содержащее пневмоклапаны ИЛИ, входы одного из которых подключены через пневматические концевые выключатели режимов к задатчикам скорости соответственно подъема и спуска, а выход через регулирующий клапан - к пусковым клапанам пневмодвигателя тали, включенные последовательно с концевыми выключателями пороговые реле, выходы которых подключены к входам другого пневмоклапана ИЛИ, связанного выходом с пневмоприводом тормоза двигателя, отличающееся тем, что, с цепью повышения надежности управления при спуске груза, оно снабжено дополнительными тормозом, подключенным к его пневмоприводу управляемым распределителем, управляющий вход которого соединен с выходом порогового реле в цепи задатчика скорости подъема, и пневмоклапаном НЕ, подключенньм входом к выходу порогового репе в цепи задатчика скорости спуска, а выходом - к одному из пусковых клапанов и одному информационному входу распределителя, другой информационный вход которого подключен к конечному выключателю в цепи задат00 чика спуска. со «fill СО
| Устройство для управления пневматическим приводом механизма передвижения крана | 1982 |
|
SU1024411A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
