Предлагаемое изобретение относится к известным механизмам для приведения в движение плоских рассевов, снабженным уравновешивающим грузом, который связан с пальцем кривошипа так, что с удалением от центра вращения последний удаляется в противоположную сторону, образуя с приводным валом соответственный эксцентриситет.
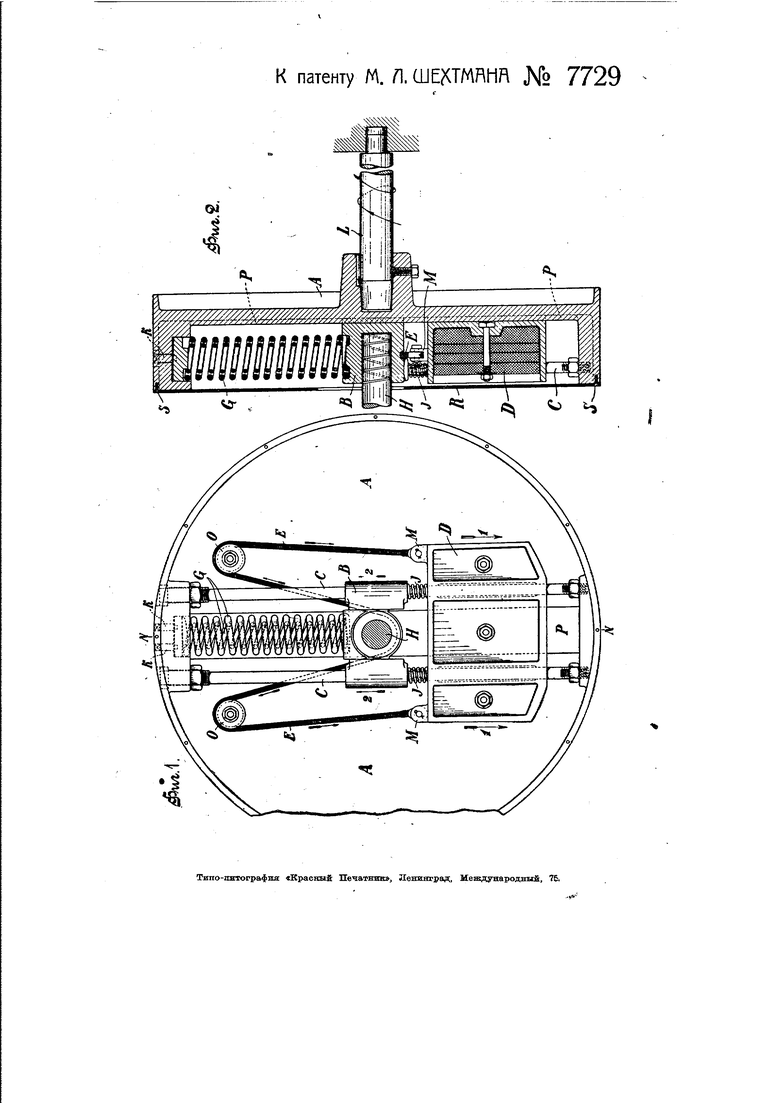
На чертеже фиг. I изображает вид предлагаемого приводного механизма сверху и фиг. 2 - разрез по линии NN на фиг. 1.
Предлагаемый приводной механизм состоит из следующих составных частей.
В маховик А ввинчены два стальные точеные болта СС, на которых насажены легко скользящие по ним груз противовеса D и ползунок В с входящим в него пальцем Н корпуса рассева. Кроме того, груз D и ползунок Б скользят,еще по направляющим Р. Ползунок Б находится под действием сдвоенной пружины G, которая упирается одним концом в ползунок, а другим в шайбу. С целью регулирования напря жения пружины, шайба может быть передвигаема посредством болтиков. -К. Груз jD связан с ползунком JB гибким стальным канатом Е, который посредством шарниров М соединен с грузом D и перекинут через ролики О, огибая также и ползунок Б. Маховик насажен на приводной вал L, который опирается на пяту, но маховик А может также быть подвешен на своем же валу L к висячему подшипнику.
Работа приводного механизма происходит следующим образом:приводя во вращение вал L,-тем самым приводят в движение и насаженный на него маховик А, укрепленный шпонкой и болтом на валу. При вращении маховика груз А вследствие действия центробежной силы, удаляется от центра по направлению указанному стрелками 1-1; отодвигаясь, груз -D потянет за собой связанный с ним канат JET и через ролик О будет передавать движение ползунку Б только в направлении, указанном стрелкам
2-2; отойдя же от центра на некоторое расстояние, ползунок В образует. с приводным валом кривошип и приведет палец Н в круговое движение.
Если на палец кривошипа пере- дается несколько меньшая нагрузка, то под действием пружины G ползунок В отодвигается вместе с пальцем Н. бдиже к центру и образуется кривошип с меньшим радиусом. Если нагрузка на палец Н увеличится, то палец Н с ползунком В дальше отойдут от центра, груз D .также отойдет дальше и вся система снова будет приведена в уравновешенное состояние.
Чтобы при остановке машины не происходило удара между грузом D и ползунком В при их сближении между ними помещены небольшие пружинки 1. Весь маховик прикрывается крышкой R, прикрепляющейся шурупами 8.
Предмет патента.
Механизм для приведения в движение плоских рассевов, уравновешивающий груз которого связан с пальцем кривошипа так, что с удалением первого от приводного вала, второй удаляется в противоположную сторону, образуя с приводным валом соответствующий данному числу оборотов эксцентриситет, отличающийся тем, что он состоит из груза D, скользящего по направляющим Р и стержням СС, связанного канатом Е, перекинутым через ролики О, с ползуном В, также перемещающимся по стержням СС и отжимаемым к приводному валу L пружинами так, что между последним и пальцем кривошипа Н, вставленным в ползун В, образуется (Соответствующий окружному усилию эксцентриситет.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводной механизм для плоского рассева | 1927 |
|
SU8424A1 |
| Станок для изготовления щепы | 1980 |
|
SU897511A1 |
| Вибровозбудитель | 1985 |
|
SU1377155A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ УПРУГИХ ЭЛЕМЕНТОВ НА УСТАЛОСТЬ | 2007 |
|
RU2336516C1 |
| Устройство для изготовления тетрадей | 1928 |
|
SU22677A1 |
| УСТРОЙСТВО для ПОДАЧИ ПЛЕНКИ К ТРАНСПОРТИРУЮЩЕМУ МЕХАНИЗМУ КИНОАППАРАТА | 1973 |
|
SU372850A1 |
| Логарифмическая счетная машина | 1928 |
|
SU20375A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| Просеивающий аппарат | 1927 |
|
SU19897A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |