(54) ИНТЕГРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Множительный механизм | 1977 |
|
SU742959A1 |
| МНОЖИТЕЛЬНЫЙ МЕХАНИЗМ К ТОПОПРИВЯЗЧИКУ | 2008 |
|
RU2372652C2 |
| Интегрирующее устройство | 1979 |
|
SU922777A1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2092898C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2004 |
|
RU2280785C1 |
| Интегрирующее устройство | 1977 |
|
SU634294A1 |
| СЕЯЛКА ДЕРНИННАЯ КОМБИНИРОВАННАЯ | 2002 |
|
RU2228584C2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Автоматический счетчик объема и количества бревен, перемещаемых продольным транспортером | 1959 |
|
SU129064A1 |
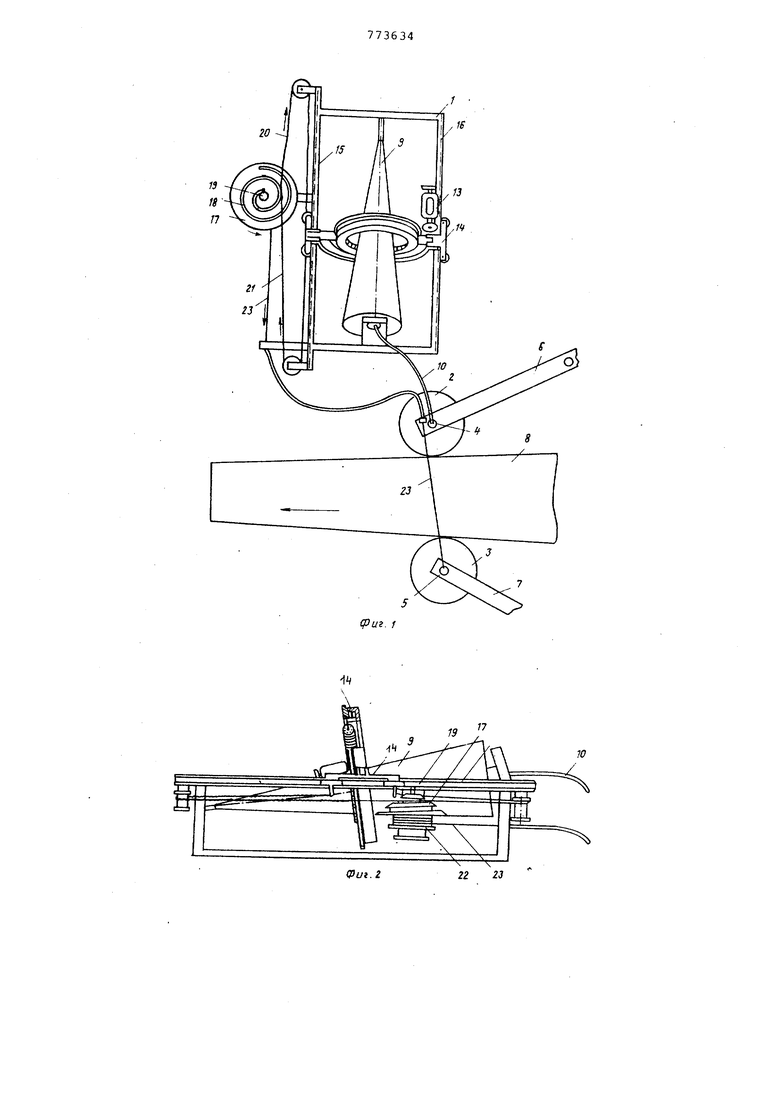
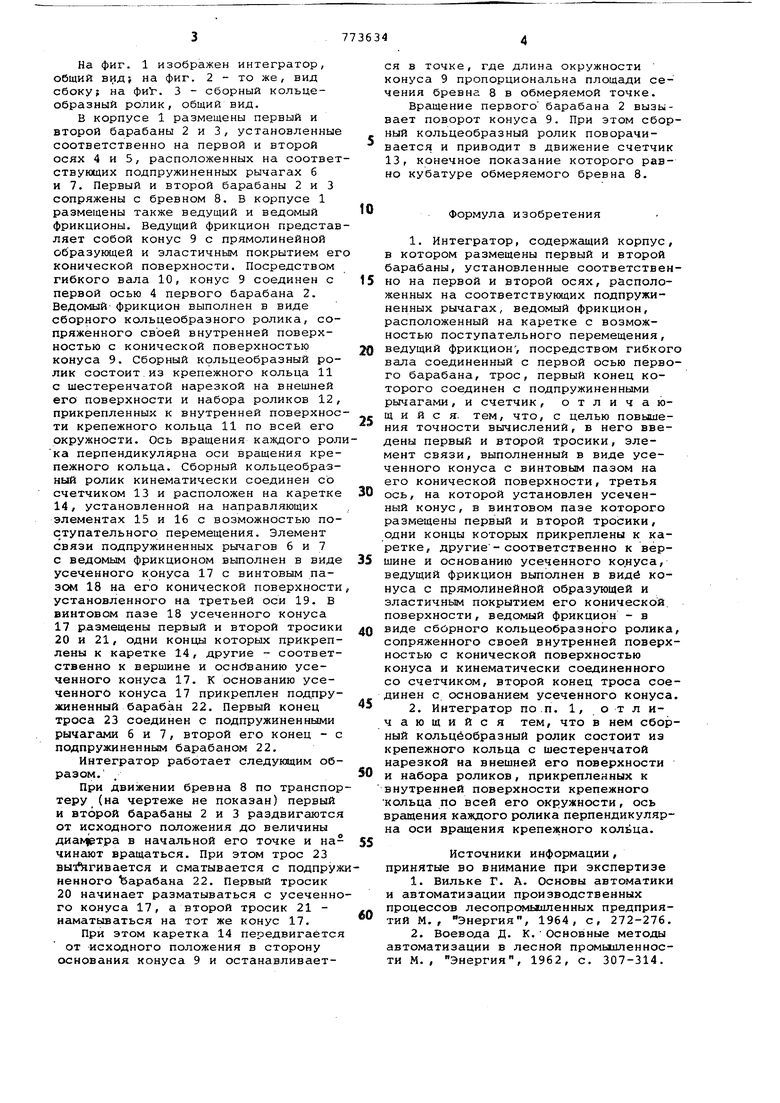
Изобретение относится к вычислительн:ой технике и может быть использовано для вычисления, например, кубатуры бревен с учетом изменения сбега древесного ствола по всей его длине. Известно устройство, содержащее ведущий фрикцион, выполненный в виде диска и ведомого фрикционного ролика Наиболее близким по технической сущности к предлагаемому .является устройство, содержащее корпус, в кот ром размещены первый и второй бараба вы, установленные соответственно на первой и второй осях, расположенных на соответствующих подпружиненных рычагах, ведомый фрикцион, распсшоженный на каретке с возможностью поступательного перемещения, ведупшй фрикцион, посредством гибкого вала .соединенный с первой осью первого барабана, трос, первый конец которого соединен с подпружиненными рычагами и счетчик 2. Недостатком известных устройств является низкая точность вычислений Цель изобретения - повышение точ лости вычислений. Поставленная цель достигается тем, что в интегратор введены первый и второй тросики, элемент связи, выполненный в виде усеченного конуса с винтовым пазом на его конической поверхности, третья ось, на которой установлен усеченный конус, в пазе которого размещены первый и второй тросики, одни концы которых прикреплены к каретке, другие соответстаенно к вершине и основанию усеченного конуса, ведущий фрикцион выполнен в виде конуса с прямолинейной образукхцей и эластичным покрытием его конической поверхности, ведолвлй фрикцион виде сборного кольцеобразного ролика, сопряженного с конической поверхностью конуса и кинематически соединенного со счетчиком, второй конец троса соединен с основанием усеченного конуса. Сборный кольцеобразный ролик состоит из крепежного кольца с шестеренчатой нарезкой на внгаиней его поверхности и набора роликов, прикрепленных к внутренней поверхности крепежного кольца по всей его окружности, ось вращения .каждого ролика перпендикулярна оси вращения крепежного кольца. На фиг. 1 изображен интегратор, общий ВИД} на фиг. 2 - то же, вид сбоку; на фи1. 3 - сборный кольцеобразный ролик, общий вид. В корпусе 1 размещены первый и второй барабаны 2 и 3, установленные соответственно на первой и второй осях 4 и 5, расположенных на соответ ствующих подпружиненных рычагах б и 7. Первый и второй барабаны 2 и 3 сопряжены с бревном 8. В корпусе 1 размещены также ведущий и ведомый фрикционы. Ведущий фрикцион представ ляет собой конус 9 с прямолинейной образующей и эластичным покрытием ег конической поверхности. Посредством гибкого вала 10, конус 9 соединен с первой осью 4 первого барабана 2. Ведомый- фрикцион выполнен в виде сборного кольцеобразного ролика, сопряженного своей внутренней поверхностью с конической поверхностью конуса 9. Сборный кольцеобразный ролик состоит из крепежного кольца 11 с шестеренчатой нарезкой на внешней его поверхности и набора роликов 12 прикрепленных к внутренней поверхнос ти крепежного кольца 11 по всей его окружности. Ось вращения каждого рол ка перпендикулярна оси вращения крепежного кольца. Сборный кольцеобразный ролик кинематически соединен со счетчиком 13 и расположен на каретке 14, установленной на направляющих элементах 15 и 16 с возможностью поступательного перемещения. Элемент связи подпружиненных рычагов 6 и 7 с ведомым фрикционом выполнен в виде усеченного конуса 17 с винтовым пазом 18 на его конической поверхности установленного на третьей оси 19. В винтовом пазе 18 усеченного конуса 17 размещены первый и второй тросики 20 и 21, одни концы которых прикреп лены к каретке 14, другие - соответ ственно к вершине и оснс5ванию усеченного конуса 17. К основанию усеченного конуса 17 прикреплен подпру жиненный барабан 22. Первый конец троса 23 соединен с подпружиненными рычагами б и 7, второй его конец - с подпружиненным барабаном 22. Интегратор работает следующим об разом. . При движении бревна 8 по транспо теру (на чертеже не показан) первый и второй барабаны 2 и 3 раздвигаютс от исходного положения до величины диa ieтpa в начальной его точке и на чинают вращаться. При этом трос 23 виЛгивается и сматывается с подпру ненного Ъарабана 22. Первый тросик 20 начинает разматываться с усеченн го конуса 17, а второй тросик 21 наматываться на тот же конус 17. При этом каретка 14 передвигаетс от исходного положения в сторону основания конуса 9 и останавливается в точке, где длина окружности конуса 9 пропорциональна площади сечения бревна 8 в обмеряемой точке. Вргицение первого барабана 2 вызывает поворот конуса 9. При этом сборный кольцеобразный ролик поворачивается и приводит в движение счетчик 13, конечное показание которого равно кубатуре обмеряемого бревна 8. Формула изобретения 1.Интегратор, содержащий корпус, в котором размещены первый и второй барабаны, установленные соответственно на первой и второй осях, расположенных на соответствующих подпружиненных рычагах, ведомый фрикцион, расположенный на каретке с возможностью поступательного перемещения, ведущий фрикцион , посредством гибкого вала соединенный с первой осью первого барабана, трос, первый конец которого соединен с подпружиненными рычагами, и счетчик, отличающийся, тем, что, с целью повышения точности вычислений, в него введены первый и второй тросики, элемент связи, выполненный в виде усеченного конуса с винтовым пазом на его конической поверхности, третья ось, на которой установлен усеченный конус, в винтовом пазе которого размещены первый и второй тросики, одни концы которых прикреплены к каретке, другие - соответственно к вершине и основанию усеченного конуса, ведущий фрикцион выполнен в виде конуса с прямолинейной образующей и эластичным покрытием его конической, поверхности, ведомый фрикцион - в виде сборного кольцеобразного ролика, сопряженного своей внутренней поверхностью с конической поверхностью конуса и кинематически соединенного со счетчиком, второй конец троса соединен с основанием усеченного конуса. 2.Интегратор по.п. 1, отличающийся тем, что в нем сборный кольцеобразный ролик состоит из крепежного кольца с шестеренчатой нарезкой на внешней его поверхности и набора роликов, прикрепленных к внутренней поверхности крепежного кольца по всей его окружности, ось вращения каждого ролика перпендикулярна оси вращения крепежного кольца. Источники информации, принятые во внимание при экспертизе 1.Вильке Г. А. Основы автоматики и автоматизации производственных процессов лесопромышленных предприятий М. , Энергия, 1964, с, 272-276. 2.Воевода Д. К.Основные методы автоматизации в лесной промыппенности М., Энергия, 1962, с. 307-314.
IS
Л
Ю
