1
Изобретение относится к вычислительной технике, а также к устройствам, в которых интегрирование выполняется с помощью механических средств и может быть использовано в навигационной аппаратуре наземных транспортных средств, для автоматического определения текущих координат положения движущегося транспорта на местности. Обычно подобные устройства называют- ся счетно-решающими и состояит они из двух узлов (синусно-косинусного построителя и множительного механизма)
Известен множительный механизм к 15 счетно-решающему устройству, содержащий ведущий фрикционный диск, два ведомых шарообразных ролика, посаженных один над другим в цилиндрическом отверстии, сделанном на ка- 20 ретке, которая установлена на двух винтообразных направляющих с возможностью перемещения в период работы прибора вдоль диаметра фрикционого диска. Ведомые ролики контактируют 25 между собой, а кроме того, нижний ролик взаимодействует с ведущим фрикционным диском, а верхний - с . цилиндрическим вашом, который связан со счетным механизмом 1. ЗО
Недостатком известного множительного механизма является то, что взаимодействие ведущего фрикционного диска с ведомыми роликами, а тех с цилиндрическим валом достигается путем фрикцирнного сцепления каждой пары на очень маленькой площадке. Это снижает надежность сцепления, а значит, и точность результатов, особенно тогда, когда множительный механизм, пробыв некоторое время в эусплуатации, чуть разбалтывается. Кроме того, такой интегратор, будучи прицезионным, сложен в изготовлении.
Наиболее близким техническим решением к данному изобретению является множительный механизм, содержащий корпус с направляющими, на которых установлена подвижная каретка, кинематически соединенная с тягой синусно-косинусного построитеведущий фрикцион, который укрепля, в корпусе и кинематически соедиленнен с валом датчика пути, и ведомый фрикцион, укрепленный на каретке и кинематически соединенный со счетчиком координат 2.
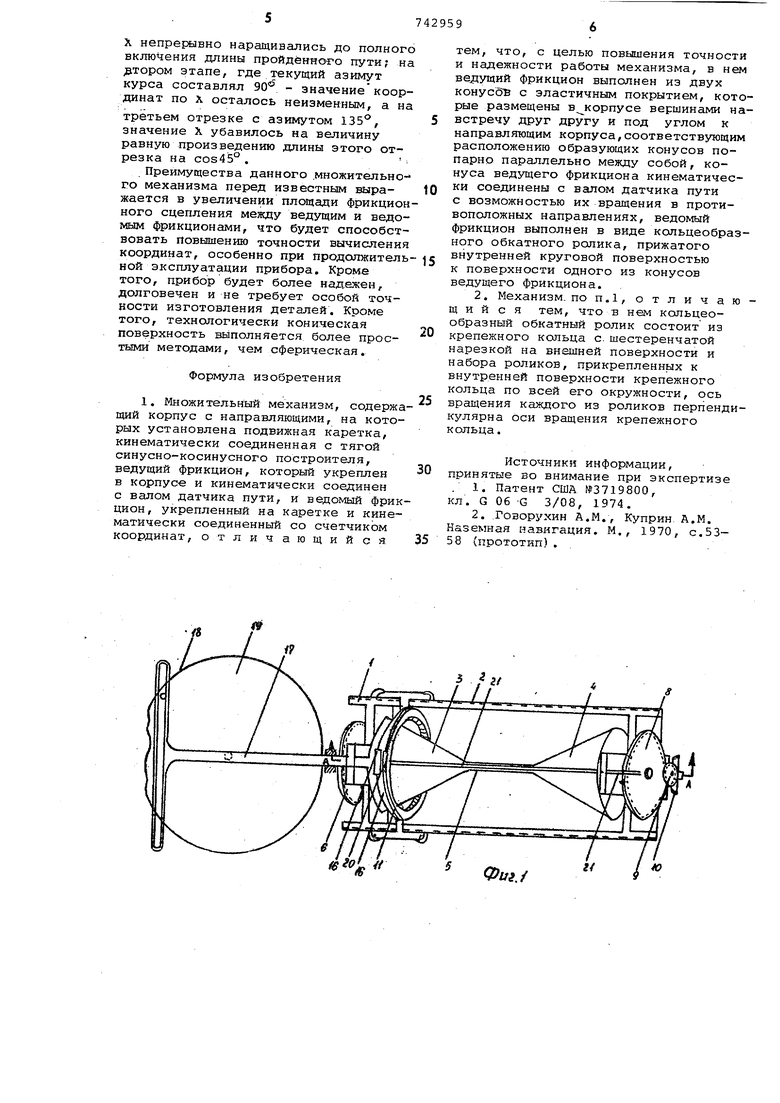
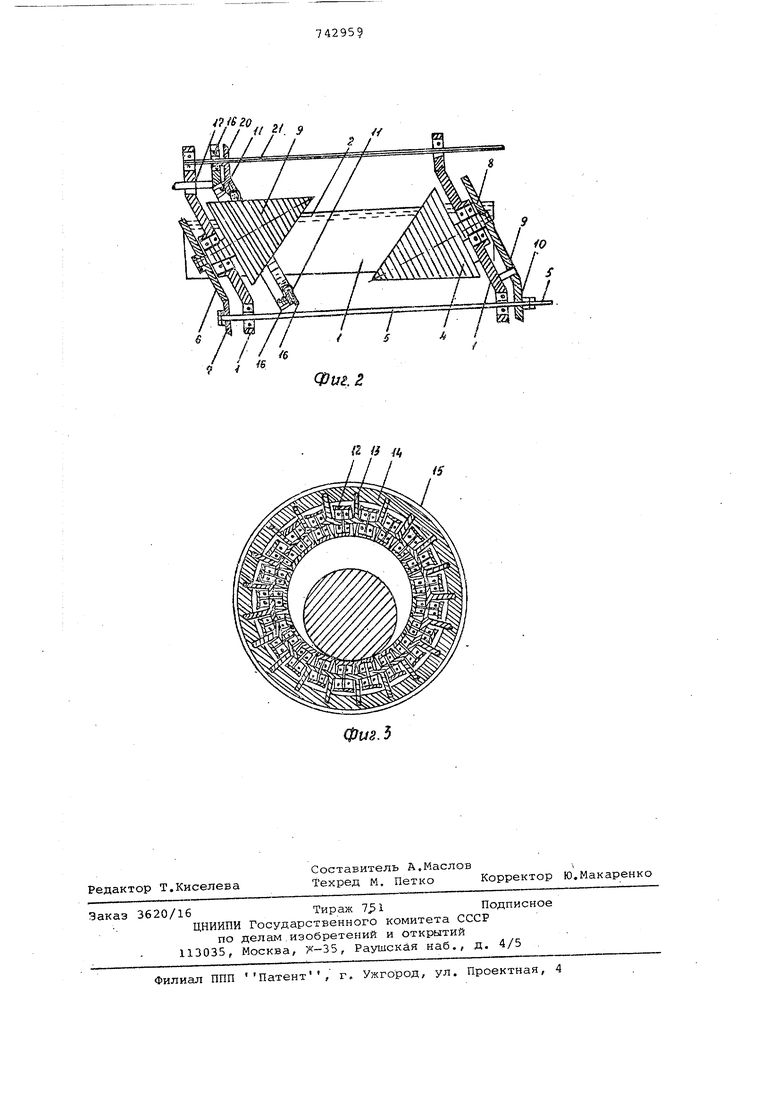
Недостатком данного множительного устройства является то, что в нем. как и в предыдущем, не обеспечивается Достаточно надежное фрикционное сцепление между ведущими и ведомыми фрикционами,так как контактируют они небольшой площадью. Это снижает ТОЧНОСТЬ вычисляемых координат, особенно, после некоторого периода эксплуатации прибора. Цель изобретения - повышение точности и надежности работы механизма. Поставленная цель достигается тем, что множительный механизм,, содерйсащий корпус с направляющими, на которых установлена подвижная карет ка, ; кинематически соединенная с тягой j синусно-косинусного построителя ведущий фрикцион, который укреплен в корпусе и кинематически соединен с валом датчика пути, и ведомый фрикцион, укрепленный на каретке и кинай1атически соединенный со счет чиком координат, имеет фрикцион, выполненный из двух конусов с эластичйым покрытием, которые размещены в корпусе вершинами навстречу друг и. под углом к направляющим корпуса, соответствующим расположению, образующих конусов попарно пара лельно между собой, конуса ведущего фрикциона кинематически соединены с валом датчика пути с возможностью ихвращения в противоположных напра лениях, ведомый фрикцион выполнен. В виде кольцеообразного обкатного ролика, прижатого внутренней круговой ; поверхностью к поверхности одно го Из конусов ведущего фрикциона, причем кольцеовразннй обкатный роли состоит из крепежного кольца с шест ренчатой нарезкой на внешней поверх ности и набора роликов, прикрепленн к внутренней поверхности крепежного кольца по всей его окружности, ось вращения каждого из роликов перпендик Ыярна оси йращения крепежного кольца. На фиг.1 изображен множительный механизм, вид сверху; на фиг.2 разрез А-А на фиг,1;. на фиг.З изображён обкатный ролик, разрез. Множительный механизм включает корпус 1 с направляющими 2, конусы 3 и 4 с эластичным покрытием, установз1енные на корпусе 1 с возможност вращения и соединенные с валом 5 да чика пути посредством шестерен б и 7 - конус 3 и 8 - 10 конус 4, сбо ный, кольцеобразный обкатный ролик 1, состоящий из нескольких более мелких роликов 12, поверхность кото рых -получена вращением окружности выпуклой частью к оси вращения, которые с помощью крепителей13 подве шены к крепежному кольцу 14, содержащему в наружной части шестерню 15, которая имеет возможность вращаться со всем сборным кольцеобразным обкатным роликом на каретке 16, а ксфетка способна перемещаться каением на корпусе 1 по направляющим 2; тяга 17, связывающая каретку 16 с пальцем 18 на диске 19 синуснокосинусного построителя; счетчик координат (на фиг.1-3 не показан), приводимый в движение шестерней. 15 ерез промежуточную шестерню 20, установленную на каретке 16, .посредством телескопического соединения, Работает множительный механизм следующим образом. Машина перемещается, ее путь, выраженный суммарным числом оборотов колеса, радиус которого известен, передается через датчик пути на вал 5, Вращение вала 5 приводит в движение конусы 3 и 4 посредством, шестерен 6 и 7, а также 10, 9 и 8, причем вращаться конусы будут в разных направлениях. Один из вращающихся конусов, например 3, находясь в фрикционном сцеплении со сборным кольцеобразным роликом 11, проталкивает его, а тот, вращаясь, с помощью шестерни 15, приводит в движение промежуточную шестерню 20, которая посредством телескопического соеди- - нения через валик 21, приводит в движение счетчик координат. Положение каретки 16 с обкатным роликом 11 на поверхности конусов регулируется при помощи тяги 17, связывающей множительный механизм с синусно-косинусным построителем. Представим, что рассматриваемый множительный механизм вычисляет при-, ращение Л х, а такущий азимут курса равен О , В этом случае палец 18 на диске 19 синусно-косинусного построителя разместится на одной прямой с тягой 17 в крайнем левом положении, а обкатный ролик - у основания конуса 3, значит конус будет вращать- обкатный ролик с максимальньом передаточным числом, эквивалентным всему пути, проходимому машиной с текущим азимутом. Когда машина повернеТ, например на восток, и asttMyi примет, значение 90°, диск 19 прокрутится вправо на этот же .угол, а палец 18 протолкает тягу 17 вправо на отрезок, равный расстоянию от периферии до центра диска 19. Тяга Г7 протолкнет каретку 16 со сборным обкатным роликом 11 вправо до точки вершины конуса, обкатный ролик прекратит вращение, но если машина снова изменит свой курс, например, на юго-восток и пойдет по азимуту 135°, то тяга протолкнет каретку еще дальше вправо до середины конуса 4. Обкатный ролик снова будет враадаться, только в обратном направлении. На счетчике координат за это время произойдет следующее. Перед выходом машины в.путь на табло обозначены значения X и Y исходной точки. На первом отрезке пути, когда азимут курса был 0°, - координаты X непреривно наращивались до полного включения длины пройденного пути; на ;втором этапе, где текущий азимут курса составлял 90® - значение координат по X осталось неизменным, а на третьем отрезке с азимутом 135 , значение X убавилось на величину равную произведению длины этого отрезка на cos45° . Преимущества данного .множительного механизма перед известным выражается в увеличении площади фрикцион ного сцепления между ведущим и ведомым фрикционами, что будет способствовать повышению точности вычисления координат, особенно при продолжитель ной эксплуатации прибора. Кроме того, прибор будет более надежен, долговечен и не требует особой точности изготовления деталей. Кроме того, технапогически коническая поверхность вьаполняется более простыми методами, чем сферическая. Формула изобретения 1. Множительный механизм, содерж щий корпус с направляющими, на кото рых установлена подвижная каретка, кинематически соединенная с тягой синусно-косинусного построителя, ведущий фрикцион, который укреплен в корпусе и кинематически соединен с валом датчика пути, и ведомый фри цион, укрепленный на каретке и кине матически соединенный со счетчиком отличающийся координатJ тем, что, с целью повышения точности и надежности работы механизма, в нем ведущий фрикцион выполнен из двух конусбв с эластичным покрытием, которые размещены в корпусе вершинами навстречу друг другу и под углом к направляющим корпуса,соответствующим расположению образующих конусов попарно параллельно между собой, конуса ведущего фрикциона кинематически соединены с валом датчика пути с возможностью их вращения в противоположных направлениях, ведомый фрикцион выполнен в виде кольцеобразного обкатного ролика, прижатого внутренней круговой поверхностью к поверхности одного из конусов ведущего фрикциона. 2. Механизм, по п.1, отличающий с я тем, что в нем кольцеообразный обкатный ролик состоит из крепежного кольца с. шестеренчатой нарезкой на внешней поверхности и набора роликов, прикрепленных к внутренней поверхности крепежного кольца по всей его окружности, ось вращения каждого из роликов перпендикулярна оси вращения крепежного кольца. Источники информации, принятые во внимание при экспертизе 1.Патент США №3719800, кл. G Об -G 3/08, 1974. 2.Говорухин A.M., Куприн A.M. Наземная навигация. М., 1970, с.5358 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОЖИТЕЛЬНЫЙ МЕХАНИЗМ К ТОПОПРИВЯЗЧИКУ | 2008 |
|
RU2372652C2 |
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Интегратор | 1979 |
|
SU773634A1 |
| Устройство для счисления пути корабля при частой смене курса | 1959 |
|
SU133614A1 |
| ВСЕСОЮЗНАЯ ПАТ?НТНО-ЯХВл'1Е;'КДЙБИБЛИОТЕКА | 1971 |
|
SU317095A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 2003 |
|
RU2244255C2 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 2005 |
|
RU2292524C1 |
| АВТОМАТИЧЕСКИЙ ПРОКЛАДЧИК | 1968 |
|
SU231850A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
4ilBZO
iS Zi, s
Фш.2
a // /4
IS
фш.Ь
