Изобретение относится к вычислительной технике и может быть использовано в навигационной аппаратуре наземных транспортных средств для автоматического определения текущих координат положения двигающегося транспорта на местности.
Известен множительный механизм, содержащий корпус с направляющими, на которых установлена подвижная каретка, кинематически соединенная с тягой синусно-косинусного построителя; ведущий фрикцион, выполненный из двух конусов, размещенных в корпусе вершинами навстречу друг другу, вращающихся в противоположных направлениях и соединенных с валом датчика пути; ведомый фрикцион, укрепленный на каретке и кинематически соединенный со счетчиком координат, выполнен в виде кольцеобразного обкатного ролика, состоящего из крепежного кольца и набора роликов, прикрепленных к внутренней поверхности крепежного кольца / А.с. 742959 СССР, МКИ G06G 3/04, Бюл. 1980 - №23 [1].
Недостатком данного множительного устройства является то, что оно громоздко из-за наличия двух конусов, а кроме того, не может обеспечить высокую точность результатов измерения из-за наличия широкой зоны нечувствительности при контактировании фрикционов на участке, близком к вершинам конусов, устройство также неудобно для интегрирования знакопеременных процессов.
Технический результат изобретения - повышение точности и надежности работы механизма, уменьшение габаритов и веса прибора.
Технический результат достигается тем, что в известном множительном механизме, содержащем корпус с направляющими, на которых установлена подвижная каретка, кинематически соединенная с тягой синусно-косинусного построителя, ведущий фрикцион, укрепленный на корпусе и кинематически соединенный с валом датчика пути, а также ведомый фрикцион, укрепленный на каретке и выполненный в виде кольцеобразного обкатного ролика, прижатого своей внутренней круговой поверхностью к поверхности конуса, особенностью является то, что в нем ведущий фрикцион представлен одним конусом, дополнительно введен механический дифференциал, водило которого имеет кинематическую связь с валом датчика пути, первая коническая шестерня которого закреплена на валике телескопического соединения, посредством которого она связана с промежуточной шестерней, закрепленной на обкатном ролике, а вторая - суммирующая шестерня дифференциала поддерживает кинематическую связь со счетчиком координат.
Выполнение ведущего фрикциона с использованием только одного конуса позволяет уменьшить габариты и вес прибора, упрощает конструкцию инструмента и повышает его надежность в работе.
Ввод механического дифференциала в прибор, где интегрируются как положительные, так и отрицательные значения входной величины, позволяет увеличить точность вычислений, так как устраняется зона нечувствительности, которая находится на участках, примыкающих к вершине конуса. Ввод механического дифференциала позволяет также сократить до минимума скольжение фрикционов, чем и обеспечивается высокая точность вычислений.
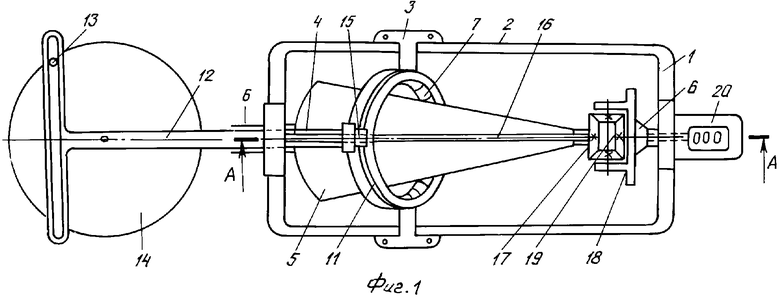
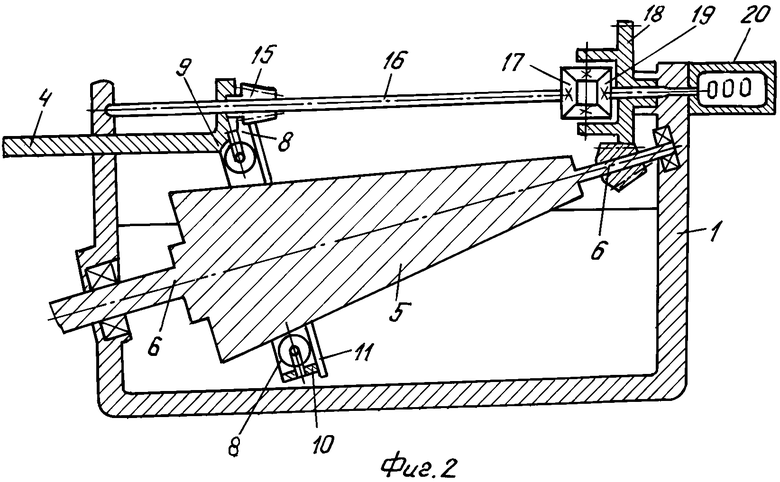
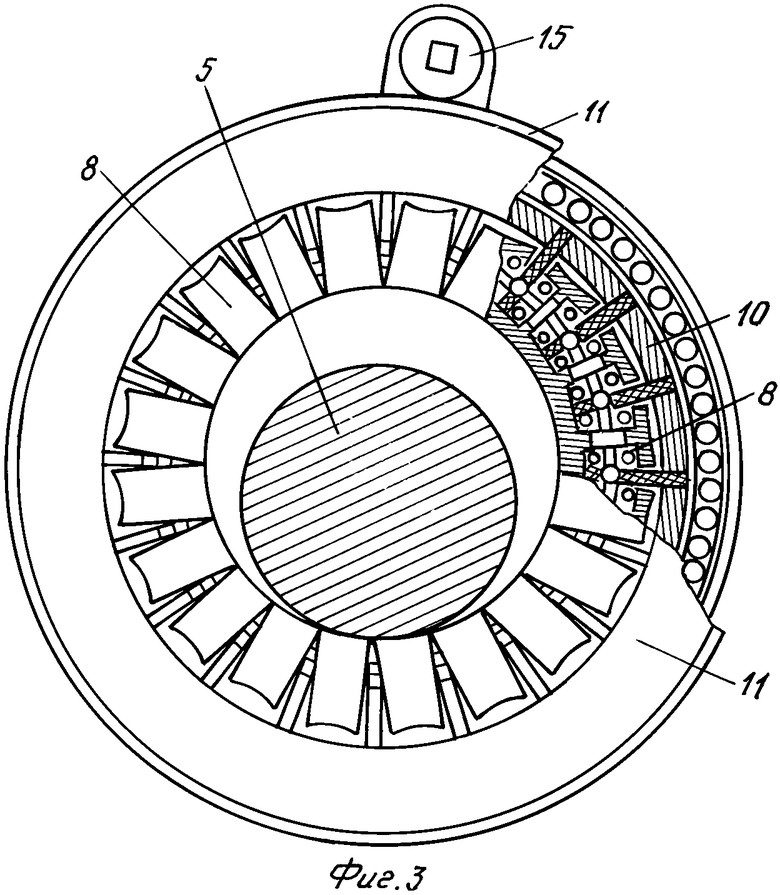
На фигуре 1 изображен множительный механизм, вид сверху; на фигуре 2 - разрез по А-А на фигуре 1; на фигуре 3 - обкатный ролик, разрез.
Множительный механизм включает корпус 1 с направляющими 2, на которых установлена каретка 3, кинематически соединенная с тягой синусно-косинусного построителя 4; конус 5 установлен на корпусе 1 с возможностью вращения и соединен с валом датчика пути 6; сборный кольцеобразный обкатный ролик 7, состоящий из нескольких более мелких обкатных роликов 8, которые с помощью крепителей 9 подвешены к крепежному кольцу 10, содержащему в наружной части шестерню 11, которая имеет возможность вращаться со всем сборным кольцеобразным обкатным роликом 8 на каретке 3, а каретка 3 способна перемещаться по направляющим 2. Тяга 12 связывает каретку 3 с пальцем 13 на диске 14 синусно-косинусного построителя 4. Промежуточная шестерня 15, укрепленная на обкатном ролике 8, посредством телескопического соединения через валик 16 связана с первой конической шестерней 17 механического дифференциала. Водило 18 механического дифференциала установлено с возможностью взаимодействовать с валом датчика пути 6, а вторая - суммирующая коническая шестерня 19 установлена с возможностью взаимодействовать со счетчиком координат 20.
Работает множительный механизм следующим образом. Машина перемещается, ее путь, выраженный суммарным числом оборотов колеса, радиус которого известен, передается через датчик пути на вал. Вращение вала датчика пути 6 приводит в движение конус 5, который, находясь в фрикционном сцеплении со сборным кольцеобразным обкатным роликом 7, проталкивает его, а тот, вращаясь, с помощью шестерни 11 приводит в движение промежуточную шестерню 15, которая посредством телескопического соединения через валик 16 приводит в движение первую коническую шестерню 17 механического дифференциала. Одновременно вращение конуса 5 через вал датчика пути 6 приводит в движение водило 18 механического дифференциала, причем вращение первой конической шестерни дифференциала и водила, несущего на себе два равных конических сателита, осуществляется в противоположных направлениях. Итоговая алгебраическая сумма результатов работы фиксируется второй суммирующей конической шестерней 19, ее вращение фиксируется на счетчике координат 20.
Преимущества данного множительного механизма перед известными выражаются в следующем: обеспечивает получение более высоких результатов измерения за счет смещения нуля интегратора от вершины конуса в сторону его основания, т.е. в сторону от зоны нечувствительности и проскальзывания. В нем уменьшены габариты и вес, а кроме того, облегчается и упрощается эксплуатация прибора, например процесс перемещения обкатного ролика с одного конуса на другой.
ИСТОЧНИК ИНФОРМАЦИИ
1. А.с. 742959 СССР, МКИ. G06G 3/04, Бюл. 1980 - №23.
| название | год | авторы | номер документа |
|---|---|---|---|
| Множительный механизм | 1977 |
|
SU742959A1 |
| Механический интегратор | 1982 |
|
SU1034047A1 |
| Устройство для счисления пути корабля при частой смене курса | 1959 |
|
SU133614A1 |
| Интегрирующее устройство для определения диффракционного распределения амплитуды и фазы | 1958 |
|
SU124146A1 |
| Интегратор | 1979 |
|
SU773634A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| ПЛАНИМЕР ДЛЯ ИЗМЕРЕНИЯ ПЛОЩАДЕЙ УЧАСТКОВ ПРОИЗВОЛЬНОЙ КОНФИГУРАЦИИ | 1966 |
|
SU215526A1 |
| Устройство для разложения приводного движения по двум взаимно перпендикулярным направлениям | 1974 |
|
SU533819A1 |
| АВТОМАТИЧЕСКИЙ ПРОКЛАДЧИК | 1968 |
|
SU231850A1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2092898C1 |
Изобретение относится к приборам вычислительной техники и может быть использовано в навигационной аппаратуре наземных транспортных средств для автоматического определения текущих координат положения двигающегося транспорта на местности. Множительный механизм содержит корпус с направляющими, на которых установлена подвижная каретка, кинематически соединенная с тягой синусо-косинувого построителя, ведущий фрикцион, выполненный в виде одного конуса, поддерживающего кинематическую связь с валом датчика пути, и ведомый фрикцион, который выполнен в форме сборного обкатного ролика, способного перемещаться на каретке и прижиматься своей внутренней круговой поверхностью к поверхности конуса. Кроме того, механизм содержит механический дифференциал, водило которого имеет кинематическую связь с валом датчика пути, одна из конических шестерен которого закреплена на валике телескопического соединения, посредством которого она связана с промежуточной шестерней, закрепленной на сборном обкатном ролике. Вал ведущего фрикциона поддерживает кинематическую связь с водилом, несущим на себе два равных конических сателлита, а вторая коническая шестерня дифференциала кинематически связана со счетчиком координат. Технический результат - повышение точности и надежности работы, а также уменьшение веса и габаритов. 3 ил.
Множительный механизм, содержащий корпус с направляющими, на которых установлена подвижная каретка, кинематически соединенная с тягой синусно-косинусного построителя, ведущий фрикцион, укрепленный на корпусе и кинематически соединенный с валом датчика пути, а также ведомый фрикцион, укрепленный на каретке и выполненный в виде кольцеобразного обкатного ролика, прижатого своей внутренней круговой поверхностью к поверхности конуса, отличающийся тем, что в нем ведущий фрикцион представлен одним конусом, дополнительно введен механический дифференциал, водило которого имеет кинематическую связь с валом датчика пути, первая коническая шестерня закреплена на валике телескопического соединения, посредством которого она связана с промежуточной шестерней, закрепленной на обкатном ролике, а вторая - суммирующая шестерня дифференциала поддерживает кинематическую связь со счетчиком координат.
| Множительный механизм | 1977 |
|
SU742959A1 |
| Фрикционный множительный механизм | 1957 |
|
SU114354A1 |
| US 3719800 A, 06.03.1973. | |||

