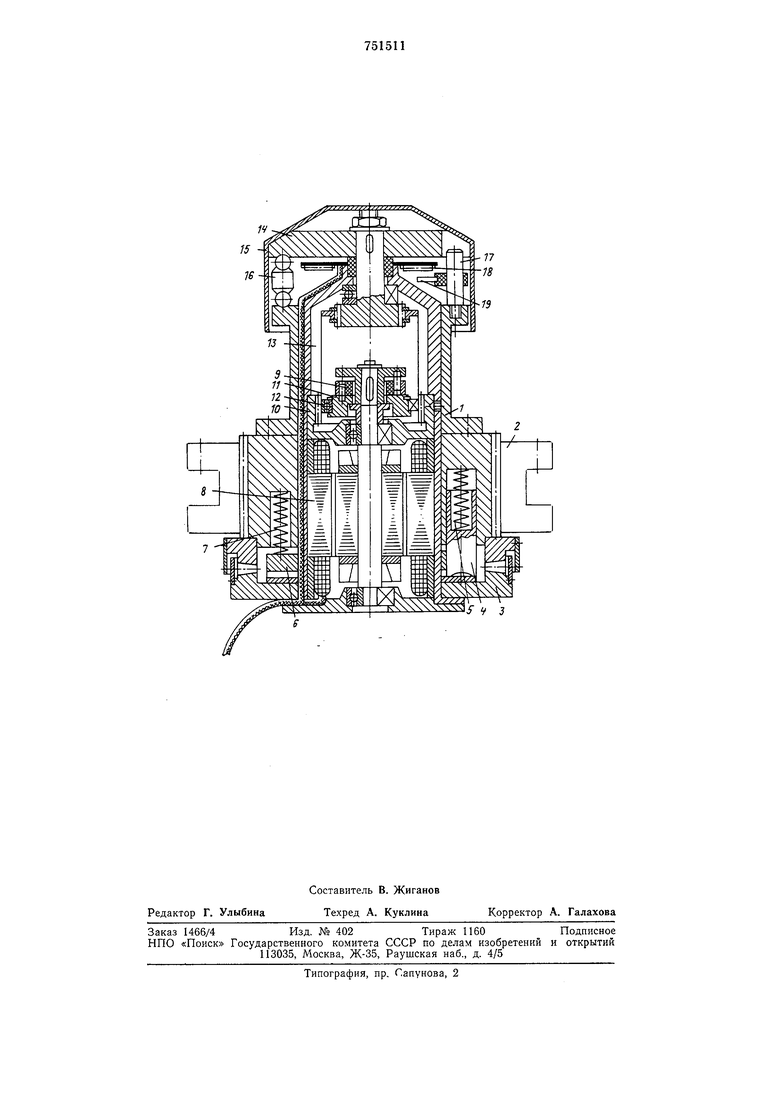
новленную на выходном валу редуктора, наклоняющиеся солдатики, выполненные в виде шариков 15, соединенных между собой роликами 16, иоводковый упор 17, а также командоаппарат, содержаш,ий магнитоуправляемые герконы 18 и постоянный магнит 19, установленный на поводковом упоре 17 с возможностью перемещения вдоль него для регулировки зазора между магнитом и герконами.
На чертеже показана автоматическая револьверная головка в зафиксированном положении.
Головка работает следующим образом.
Вал электродвигателя 8 передает вращение механическому генератору волн (9, И, 12), деформируя при этом гибкое зубчатое колесо 13 и вводя его зубья в зацепление с зубьями жесткого колеса 10. При этом опорная щайба 14 получает вращение от выходного вала редуктора через часть зубьев гибкого колеса 13, а корпус 1 остается неподвижным, так как зубья плоских венцов находятся в зацеплении, и взаимодействует с солдатиками, наклоняя их. Пружины 7 поднимают корпус вверх, выводя из зацепления фиксирующие зубчатые венцы, и при дальнейшем повороте опорной шайбы 14 поводковый упор 17 поворачивает корпус 1 с закрепленными на нем инструмеитодержателями 2. Так происходит поворот корнуса 1 револьверной головки с инструментодержателями 2 в заданную позицию, регистрацию которых осуществляют соответствующим герконом 18 при прохождении около него подведенного на нужное расстояние магнита 19. По команде с этого геркона происходит реверсирование вала электродвигателя 8 и соответственно изменение направления вращения корпуса 1. Однако упор-толкатель 4 под действием пружины 5 западает в паз соответствующей позиции и не позволяет поворачивать корпус 1, так как на упоре-толкателе лыска
выполнена в виде скоса только на одной его стороне. Опорная щайба при обратном вращении приводит наклоняющиеся солдатики в вертикальное положение. Солдатики, принимая вертикальное положение, перемещают корпус 1 вниз, сжимая пружны 7, замыкая зубчатые плоские венцы до момента размыкания замкнутых контактов герконов 18. Последние размыкаются вследствие того,
0 что корпус 1 вместе с магнитом 19 опускается вниз и магнитное поле отводится от нормально открытых контактов герконов 18. Цикл разжима, поворота в нужную позицию и фиксации головки закончен. Угол
5 поворота опорной шайбы 14 относительно корпуса 1 и величина подъема последнего зависят от величины паза опорной шайбы 14, в котором размещен поводковый упор 17.
Формула изобретения
1. Автоматическая револьверная головка, содержащая корпус, встроенные в него электродвигатель, редуктор и механизмы
5 зажима и позиционирования, отличающаяся тем, что, с целью повышения надежности работы, головка снабжена самоустанавливаюшимся на валу электродвигателя механическим генератором волн,
0 встроенным в корпус головки и выполненным в виде гибкого и жесткого зубчатых колес, причем гибкое колесо кинематически соединено с механизмом зажима и позиционирования.
5 2. Головка по п. 1, отличающаяся тем, что, с целью повышения автоматизации, головка сиабжеиа магнитоуправляемым командоаппаратом типа геркон, закрепленным на элементах механизма зажима и позициоиирования.
Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1293526, кл. В 23В 29/32, опубл. 31.10.57.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
| Автоматическая револьверная головка | 1978 |
|
SU774812A1 |
| Автоматическая револьверная головка металлорежущего станка | 1985 |
|
SU1329918A1 |
| Автоматическая револьверная головка | 1983 |
|
SU1151365A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1227357A1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 2007 |
|
RU2345869C1 |
| Автоматическая револьверная головка | 1987 |
|
SU1437152A2 |
| Револьверная головка | 1981 |
|
SU984702A1 |