МНОГОШПИНДЕЛЬНЫЙ СТАНОК ДЛЯ ВИБРАЦИОННОЙ
(54) ОТДЕЛКИ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Многошпиндельный станок для вибрационной отделки поверхностей деталей | 1980 |
|
SU961929A1 |
| Станок для фрикционно-механического нанесения покрытия на внутреннюю поверхность | 1987 |
|
SU1482979A1 |
| Устройство для обработки гранулированной рабочей средой | 1984 |
|
SU1237393A1 |
| Инерционно-импульсная механическая передача | 1980 |
|
SU956873A1 |
| Инерционно-импульсная механическая передача | 1979 |
|
SU881438A1 |
| Импульсный планетарный механизм | 1981 |
|
SU973986A1 |
| Буровой станок | 1987 |
|
SU1504322A2 |
| Вращательно-ударная бурильная головка | 1987 |
|
SU1434096A1 |
| Привод вибромашины для виброабразивной обработки деталей | 1989 |
|
SU1830336A1 |
| Устройство для очистки поверхности | 1989 |
|
SU1662712A1 |
Изобретение относится к области станкостроения и может быть использовано в станках для шлифования или полирования поверхностей свобод(ым абразивом в рабочих камерах, север- 5 шающих колебательные движения.
Известен станок, предназначенный для шпиндельной виброотделки кромок зубьев шестерен l .
Станок содержит корпус, упруго Ю подвешенную на корпусе заполненную абразивной средой и имеющую приводной вал кольцевую камеру, колонну с вертикгшьными направляющими, а также снабженный рабочими шпинделями 15 для установки обрабатываемых деталей, двигателем, приводным валом и редуктором шпиндельный блок, установленный на колонне механизм подъема и опускания шпиндельного блока, 20 при зтом приводные валы кольцевой камеры и шпиндельного блока расположены соосно.
Однако одностороннее врашение валов шпиндельного блока с обрабаты- 25 ваемыми деталями и несогласованное взаимодействие обрабатываемых поверхностей с рабочей средой в рабочей камере не позволяет полностью использовать технические возможности зо
станка для повышения производительности и улучшения качества обработки.
Целью изобретения является повышение производительности станка и качества отделки поверхностей деталей путем сообщения рабочей камере с абразивным материалом и валам шпиндельного блока с обрабатываемытии деталями сложных, встречнонаправленных движений.
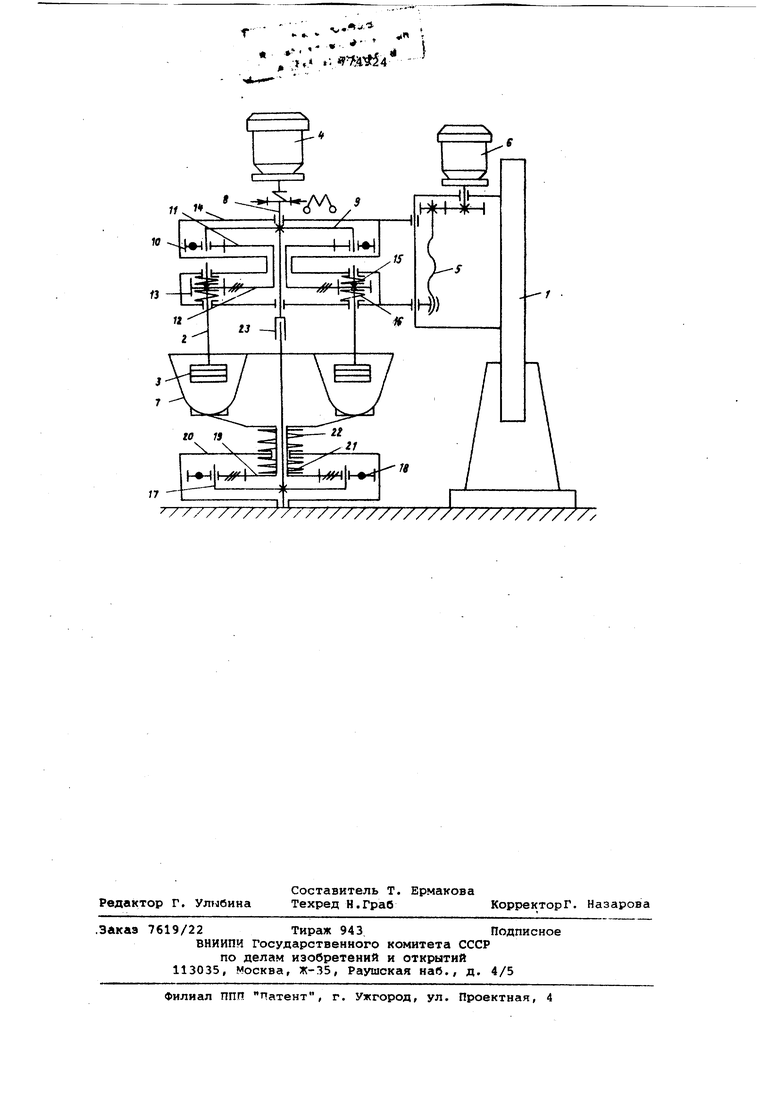
Цель достигается тем, что в многошпиндельном станке приводные валы кольцевой камеры и шпиндельного блока соединены с возможностью перемещения одного из валов внутри другого без потери кинематической связи, а рабочие шпиндели упруго установлены в корпусе редуктора шпиндельного блока с возможностью совершени.я винтовых перемещений, причем редуктор содержит планетарный инерционноимпульсный механизм и косозубую планетарную передачу с заторможенным водилом, центральные шестерни которых жестко связг ны между собой и свободно установлены на приводном валу шпинлельного блока, при зтом сателлиты косозубой планетарной передачи жестко закреплены на рабочих шпинделях, а приводной Baj; кольцеBof кинематически связан с ней косозубый планетарный инерционно-импульсный механизм, центральная солнечная косоэубая шестерня которого жестко закреплена на дне кольцевой камеры. Предложенный многошпиндельный станок для виброотделки поверхностей деталей представлен схематически на чертеже. Станок содержит колонну 1 с вертикальными направляющими, шпиндельный блок, включакяций в себя рабочие шпиндели 2 для установки обрабатываемых деталей 3, редуктор привода шпиндельного блока с приводным двигателем 4, винтовую передачу 5 с механизмом подъема и опускания шпиндельного блока и двигателя 6, кольцевую рабочую камеру 7 с абрази ной средой, приводной вал 8, выполненный из двух частей. Редуктор привода шпиндельного блока содержит планетарный инерцион но-импульсный механизм, состоящий и приводимого от двигателя 4 через пр водной вал 8 ведущего водила 9, неуравновешенных сателлитов 10, ведомой (солнечной) иестерни 11, и планетарную передачу с заторможенным водилом, центральная косозубая шеетерня 12 которой связана через косо эубые сателлиты 13 с рабочими шпинделями 2, которые опираются на корпус 14 редуктора привода шпиндельного блока через упругие элементы 15, 16. Рабочая камера получает колебательные движения от косозубого планетарного инерционно-импульсного механизма, ведущий элемент 17 которого выполнен в виде водила, Неподвижно соединенного с приводным Валом 8 и связанного через неуравновешенные косозубые сателлиты 18 с солнечной шестерней 19. Последняя соединена с кольцевой рабочей камерой 7, опирающейся на корпус 20 через упругие элементы 21, 22. . Л Приводной вал 8 выполнен со шлицевь соединением 23. Предлагаемый станок работает следующим образом.. При вра1чении ведущего водила 9 импульсатора редуктора привода шпи дельного блока по часовой стрелке (если смотреть со стороны приводно го двигателя 4) неуравновешенные сателлиты 10 обкатываются вокруг ведомой прямозубой шестерни 11. Пр этом на последнюю действует знакопеременный вращающий момент, закон изменения которого носит синус идкльный характер. Импульсы вращгио Щвгося момента, направление действ Которых совпадает с направлением вращения водила 9, считаются положительными, импульсы противоположн направления - отрицательными. Ичпу сы повторяются через один оборот неуравновешенных сателлитов 10 и ередаются на прямозубую шестерню 11, вызывая ее возвратно-вращательное движение. Последнее преобразуется с помощью косозубых цилиндрических шестерен 12, 13 планетарного механизма с зато я к енным водилом в возвратно-вращательное и возвратнопсхзтупательное движение рабочих шпинделей 2 шпиндельного блока с рбрабатываемыми деталями 3. Рабочие шпиндели 2, совершая сложное (возйратно-поступательйое и возвратновращательное) движение в зависимости от направления импульса вращающегося момента, вызывают деформацию упругих элементов 15, 16. Последние обеспечивают плавность возвратнопоступательного движения рабочих шпинделей 2 с обрабатываемыми деталями 3. Вследствие того, что положительные импульсы вращающего: : момента по величине несколько больше отрицательных импульсов (на величину сил трения в импульсаторе), имеет место медленное одностороннее вращение рабочих шпинделей 2 с обрабатываемыми деталями относительно своих осей. При вращении ведущего водила 17 импульсатора вибрационной установки неуравновешенные сателлиты 18 обкатываются вокруг солнечной шестерни 19. При этом на последнкйо и рабочую камеру действует знакопеременный вращающий момент, вызывая их возвратно-вращательное движение. Возникакяцие в косозубом зацеплении 18 И 19 осевые силы, изменение которых также носит синусоидальный характер, вызывает и возвратно-поступательное перемещение солнечной шестерни 19 и соединенной с ней рабочей камерой 7. Упругие элементы 21 и 22 обеспечивают плавность возвратно-поступательнохч) перемещения солнечной шестерни 19 с рабочей камерой 7. Вследствие того, что положительные импульсы вращгиощего момента импульсатора по величине больше отрицательных импульсов, имеет место медленное одностороннее вращение косозубой шестерни 19 и рабочей камеры 7 с рабочей средой вокруг оси приводного вала 8. Описанная работа станка соответствует рабочей позиции редуктора привода шпиндельного блока (крайнее нижнее положение) , Установка шпиндельного блока в разгрузочно-загрузочную позицию (крайнее верхнее положение) осуществляется с помощью винтовой передачи 5 механизма подъема и опускания. При этом перемещение редуктора привода шпиндельного блока и шпиндельного блока с обрабатываемыми деталями вверх сопровождается изменением дли ны приводного вала 8 за счет подвиж ного шлицевого соединения 23. Кроме того,подвижное шлицевое соединение 23 позволяет осуществлять перенастро ку станка с целью изменения характера относительного движения шпиндельных блоков с обрабатьшаемыми деталями и рабочей камеры с рабочей средой в зависимости от типа деталей и вида рабочей среды. Приведенная выше схема станка позволяет сообщить рабочим шпинделям с обрабатываемыми деталями и ра бочей камере с рабочей средой сложные (возвратно-вращательное и возвг ратно-поступательное), связанные ме ду собой движения. Это повьпаает про изводительность станка и качество отделки поверхностей деталей. Формула изобретения Многошпиндельный станок для вибрационной отделки поверхностей деталей в абразивной среде, содержащий корпус, упруго установленную на кор пусе заполненную абразивной средой и имеющую приводной вал кольцевую камеру, колонну с вертикальными направляющими, а также содержащий снабженный рабочими шпинделями для установки обрабатывае ых деталей двигателем,приводным валом и редукто ром шпиндельный блок, установленный на колонне механизм подъема и опуска ния шпиндельного блока, при этом приводные валы кольцевой камеры и шпиндельного блока расположены соосчо, отличающийся тем, что, с целью повышения производительности станка и качества отделки поверхностей деталей путем сообщения рабочим шпинделям и кольцевой камере сложных встречно направленных движений, приводные валы кольцевой камеры и шпиндельного блока соединены с возможностью пеЕ емещения одного из валов внутри другого без потери кинематической связи, а рабочие шпиндели упруго установлены в корпусе редуктора шпиндельного блока с возможностью совершения винтовых перемещений, причем редуктор содер- . жит планетарный инерционно-импульсный механизм и косозубую планетарную передачу с заторможенным водилом, центральные солнечные шестерни которых жестко соединены между собой и свободно установлены на приводном валу шпиндельного блока,при этом сателлиты косозубой планетарной передачи жестко закреплены на рабочих шпинделях, и приводной вал кольцевой камеры кинематически связан с ней через косозубый планетарный инерционно-импульсный механизм, центральная солнечная косозубая шестерня которого жестко закреплена на дне кольцевой камеры. Источники информации, принятые во внимание при экспертизе 1. Бабичев А.П. Вибрационная обработка деталей, М,, Машиностроение, 1974.
- v.,-
-- i
M
