(54) ГИДРОДИНАМИЧЕСКАЯ ОПОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРА НАЖИМНОГО ВИНТА ПРОКАТНОГО СТАНА | 1999 |
|
RU2162382C2 |
| ОПОРА РОТОРА ГТД | 1991 |
|
RU2075658C1 |
| Реверсивный подпятник электрической машины | 1980 |
|
SU995207A1 |
| УПОРНЫЙ ПОДШИПНИК | 1991 |
|
RU2020307C1 |
| УПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ С НЕПОДВИЖНЫМИ ПОДУШКАМИ | 2013 |
|
RU2538494C1 |
| Конусная инерционная дробилка | 1982 |
|
SU1209277A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ДРОССЕЛИРУЮЩИЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА И ВЫСОКИХ ДАВЛЕНИЙ | 2008 |
|
RU2375610C1 |
| ОПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ ВАЛА ТУРБОМАШИНЫ | 2003 |
|
RU2237200C1 |
| Гидростатический подпятник | 1973 |
|
SU557214A1 |
| СЕГМЕНТ ПОДПЯТНИКА ОСЕВОГО ГИДРОДИНАМИЧЕСКОГО ПОДШИПНИКА ПОГРУЖНОГО НАСОСНОГО АГРЕГАТА ДЛЯ ДОБЫЧИ НЕФТИ | 2006 |
|
RU2339854C2 |
1
Изобретение относится к области машиностроения и может быть использовано в опорах тяжелонагруженных машин.
Известна гидрояиналмческая опо- 5 ра, содержащая раз.«щенные в корпусе самоустанавливгиощиеся сегменты с элементами фиксации, опорный узел, контакткруквдий с пазом, выполненным на опорной поверхности сегмента, при- Ю вод для изменения положения точки опоры сегмента в окружном направлении р.
Однако, известная гидродинамическая опора недостаточно надежна в ра- 15 боте, так как сложна в регулировании .
Цвелью изобретения является повышение нгщежности работы опоры.
Указанная цель обеспечивается 20 тем, что привод кинематически связан с опорным узлом.
Опорный узел выполнен в виде сферической пяты с выступом имешим соответствующую с пазом форму, я жест- 25 ко связанной с пятой кольцевой обоймой, имеющее внутреннюю сферическую поверхность, а также в виде подпят- ника, контактирующего со сферической пятой и имеющего наружную сфери- 30
ческую поверхность, сопрягающуюся с внутренней сферической поверхностью кольцевой обоймы. Кроме того, в корпусе выполнен направляющий паз, а на подпятнике выполнен соответствующий ему по форме и контактйрукадйй с ним выступ, при этом направляющий паз выполнен концентрично рабочей поверхности сегмента, а привод кинематически связан с подпятником.
Элементы фиксации сегмента выполнены в виде установленных в корпусе штифтов с плоским концом, а в сегменте выполнены пазы с цилиндрической расточкой, имеющей диаметр, равный ширине плоского конца штифта.
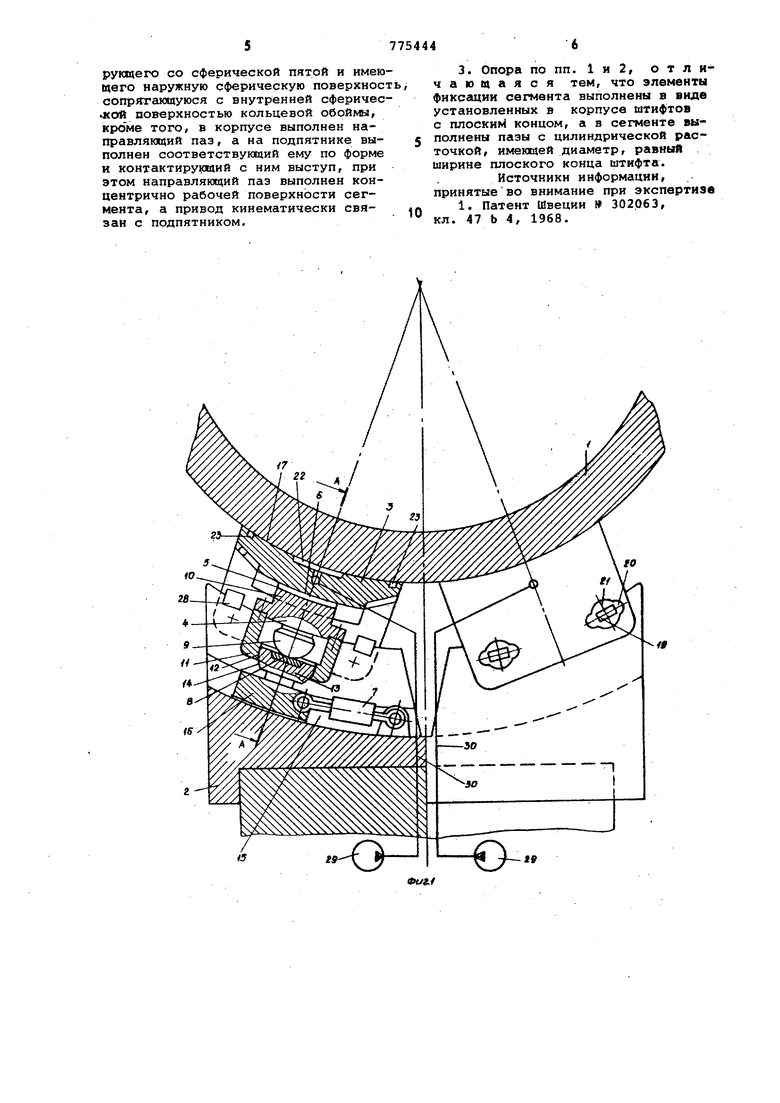
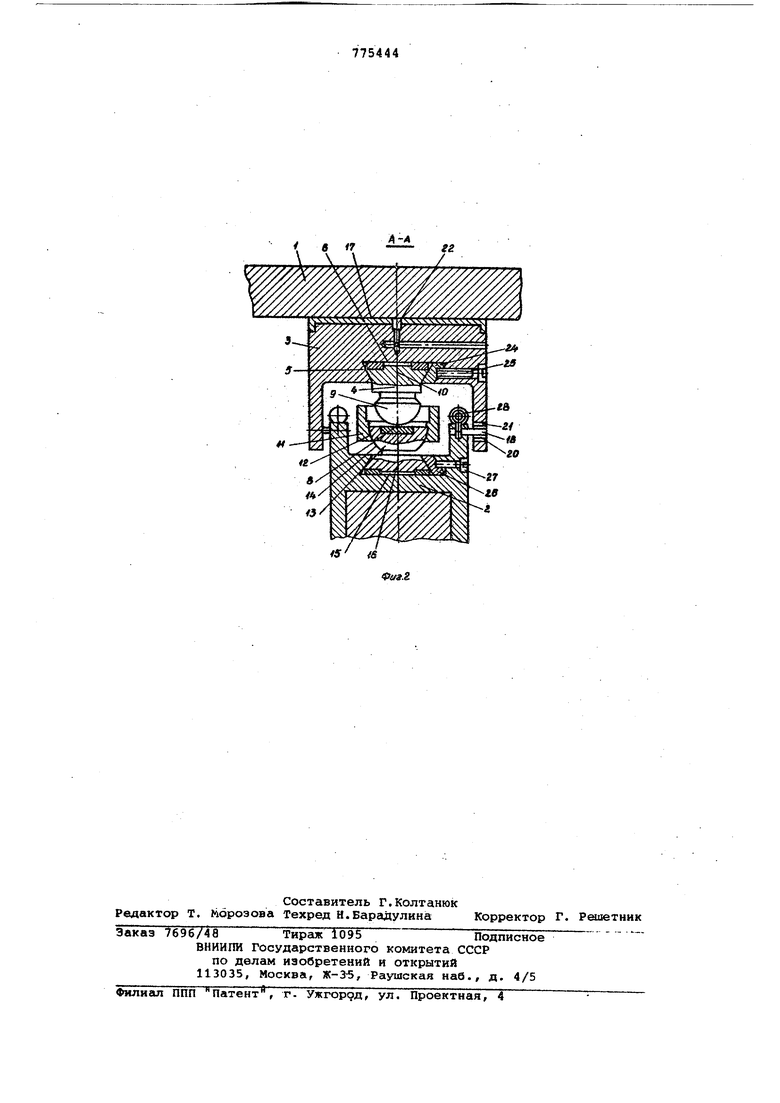
На фиг. 1 изображена гидродинамическая опора, общий вид; на фиг. 2 сечение А-А на фиг. 1.
Гидродинамическая опора содержит вал 1 и размещенные в корпусе 2 самоустанавливающиеся сегменты 3 с элементс1ми фиксации, опорный узел 4, контактирующий с пазом 5, выполненным на опорной поверхности 6 сегмента 3, и привод 7 для изменения положения точки опоры 8 сегмента 3 в окружном направлении, при этом привод 7 кинематически связан с опорнъал узлом 4.
Опорный узел 4 выполнен в виде сферической пяты 9 с выступом 10, имеющим соответствующую с пазом 5 форму, и жестко связанной с пятой 9 кольцевой обоймой 11, имеющей внутреннюю сферическую поверхность 12, а также подпятника 1,3, контактирующего со сферической пятой 9 и имеющего наружную сферическую поверхност 14, сопрягающуюся с внутренней сферической поверхностью 12 кольцевой обоймы 11.
Кроме того, в корпусе 2 выполнен направляющий паз 15, а на подпятнике 13 выполнен соответствующийему по форме и контактирующий с ним выступ 16,при этом направляющий паз Д5 выполнен концентрично рабочей поверхности 17 сегмента 3, а привод 7 кинематически связан с подпятником 13.
Элементы фиксации cerj ieHxa 3 вы-г полнены в виде установленных в корпусе 2 штифтов 18 с плоским концом 19, при этом в сегменте 3 выполнены пазы 20 с цилиндрической расточкой 21, имеющей диаметр, равный ширине плдского конца 19 штифта 18.
На рабочей поверхности 17 сегмента 3 выполнены несущий карман 22 и канавки 23, ширина которых меньше ширины сегмента 3.
Паз 5 на опорной поверхности 6 сегмента 3, выступ 10 сферической пяты 9, направляющий паз 15 в корпусе 2 и контактирующий с ним выступ 16 на подпятнике 13 выполнены в форме ласточкина хвоста по радиусу из центра вала 1. Подпятник 13 с кольцевой обоймой 11 образуют сферический шарнир.
Сферическая пята 9 содержит также регулирово ные планку 24 и винт .25, а подпятник 13 - регулировочные планку 26 и винт 27.
Штифты 18 для фиксации сегмента 3 связаны с приводом 28.
Привод 7 выполнен в виде шарнирно закрепленного гидроцилиндра.
Самоустанавливающийся сегмент 3 подключен к маслостанции 29 каналами 30 для подвода смазки.
Гидравлическая опора работает следующим образом.
Перед пуском точка контакта сферической пяты 9 с подпятником 13 должна быть расположена по оси симметрии сегмента 3. Фиксирующие штифты 18 при помощи привода 28 поворачиваются так, чтобы плоские их концы 19 вошли в цилиндрические расточки 21 пазов 20, что обеспечивает фисацию сегмента 3. Для обеспечения оптимальных условий образования гидродинамического несущего слоя, в зависимости от направления вращения вла 1, точка контакта сферической пяты 9 с подпятником 13 должна быть смещена относительно оси симметрии сегмента 3 на определенное расстояние. Для этого смазка под давлением, обеспечивающим вала 1 от сегмента 3, подается в несущий карман 22 сегмента 3. При помощи привода 7 смещают подпятник 13, взаимосвя. занный со сферической пятой 9, в
направлении, совпадающем с направле-, нием вращения вала 1 на величину, обеспечивающую после освобождения сегмента 3 образование клиновидного
Q пространства между рабочей поверхностью 17 сегмента 3 и вала 1. Винтами 25 и 27 зажимают планки 24 и 26 и фиксируют смещение, заданное сферической пяте 9. Штифты 18 по-, средством привода 28 поворачивают
5 так, чтобы плоские концы 19 штифтов 18 вышли из цилиндрических расточек 21 и расположились вдоль паза 20. При этом сегмент 3 освобождается от фиксации и обеспечивается свобода
0 его самоустановки. Вал 1 приводят во вращение. Смазка из насоса маслостанции 29 под низким давлением подается в зависимости от направления вращения вала 1 в одну из канавок
5 23 сегмента 3. Благодаря заданному смещению сферической пяты 9 обеспечиваются оптимальные условия образования гидродинамического несущего слоя между сегментом 3 и валом 1. При установившемся режиме работы подшипникового узла смазку на рабочую поверхность 17 сегмента 3 можно подавать путем полива прямо на зал 1. При остановке смазка под высоким давлением подается в карман
3 22 сегмента 3, чем обеспечивается гидростатический режим работы подшипникового узла..Затем вал 1 останавливается и прекращается подача смазки. Порядок пуска и остановки
0 машины обеспечивает высокую надежность работы гидродинамической опоры.
Формула изобретения
5 тем, что, с целью повышения надежности работы, привод кинематически связан с опорньи«1 узлом.
0 выполнен в виде сферической пяты с выступом, имеющим соответствующую с пазом форму, и жестко связанной с пятой кольцевой обоймой, имеющей внутреннюю сферическую поверхность,
5 а также в виде подпятника, контактируицего со сферической пятой и имею щего наружную сферическую поверхнос сопрягёиощуюся С внутренней сферичес 4(ой поверхностью кольцевой обоймы, кроме того, в корпусе выполнен направляющий паз, а на подпятнике выполнен соответствующий ему по форме и контактирующий с ним выступ, при этом направляющий паз выполнен концентрично рабочей поверхности сегмента, а привод кинематически связан с подпятником. 3. Опора по пп. 1 и 2, отличающаяся тем, что элементы фиксации сегмента выполнены в виде установленных в корпусе штифтов с плоским концом, а в сегменте выполнены пазы с цилиндрической расточкой, имеющей диаметр, равный ширине плоского конца штифта. Источники информации, принятые во внимание при экспертизе 1. Патент Швеции 302063, кл. 47 b 4, 1968.
